 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Globally-Optimal Correspondence-Less Visual Odometry for Planar Ground Vehicles
Mar 01, 2022
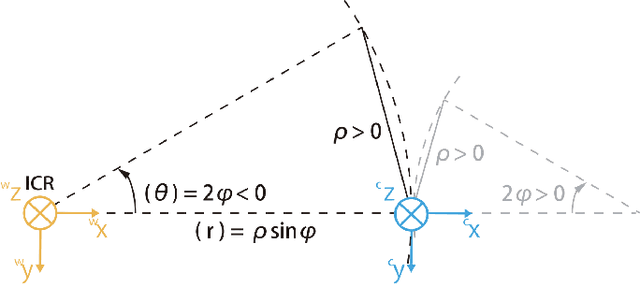
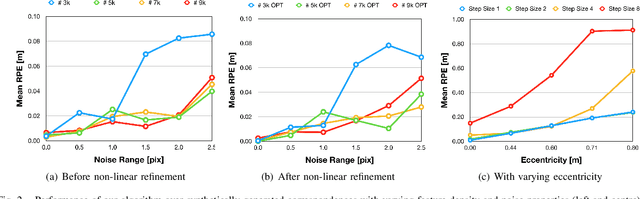
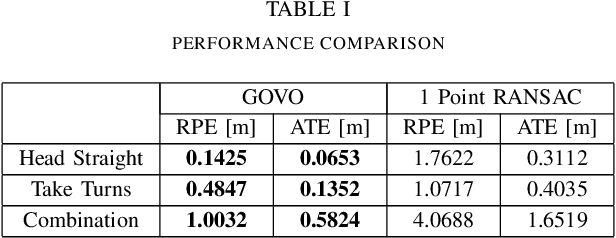
The motion of planar ground vehicles is often non-holonomic, and as a result may be modelled by the 2 DoF Ackermann steering model. We analyse the feasibility of estimating such motion with a downward facing camera that exerts fronto-parallel motion with respect to the ground plane. This turns the motion estimation into a simple image registration problem in which we only have to identify a 2-parameter planar homography. However, one difficulty that arises from this setup is that ground-plane features are indistinctive and thus hard to match between successive views. We encountered this difficulty by introducing the first globally-optimal, correspondence-less solution to plane-based Ackermann motion estimation. The solution relies on the branch-and-bound optimisation technique. Through the low-dimensional parametrisation, a derivation of tight bounds, and an efficient implementation, we demonstrate how this technique is eventually amenable to accurate real-time motion estimation. We prove its property of global optimality and analyse the impact of assuming a locally constant centre of rotation. Our results on real data finally demonstrate a significant advantage over the more traditional, correspondence-based hypothesise-and-test schemes.