 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlisa Rupenyan
Adaptive Bayesian Optimization for High-Precision Motion Systems
Apr 22, 2024
Controller tuning and parameter optimization are crucial in system design to improve closed-loop system performance. Bayesian optimization has been established as an efficient model-free controller tuning and adaptation method. However, Bayesian optimization methods are computationally expensive and therefore difficult to use in real-time critical scenarios. In this work, we propose a real-time purely data-driven, model-free approach for adaptive control, by online tuning low-level controller parameters. We base our algorithm on GoOSE, an algorithm for safe and sample-efficient Bayesian optimization, for handling performance and stability criteria. We introduce multiple computational and algorithmic modifications for computational efficiency and parallelization of optimization steps. We further evaluate the algorithm's performance on a real precision-motion system utilized in semiconductor industry applications by modifying the payload and reference stepsize and comparing it to an interpolated constrained optimization-based baseline approach.
MPC of Uncertain Nonlinear Systems with Meta-Learning for Fast Adaptation of Neural Predictive Models
Apr 18, 2024In this paper, we consider the problem of reference tracking in uncertain nonlinear systems. A neural State-Space Model (NSSM) is used to approximate the nonlinear system, where a deep encoder network learns the nonlinearity from data, and a state-space component captures the temporal relationship. This transforms the nonlinear system into a linear system in a latent space, enabling the application of model predictive control (MPC) to determine effective control actions. Our objective is to design the optimal controller using limited data from the \textit{target system} (the system of interest). To this end, we employ an implicit model-agnostic meta-learning (iMAML) framework that leverages information from \textit{source systems} (systems that share similarities with the target system) to expedite training in the target system and enhance its control performance. The framework consists of two phases: the (offine) meta-training phase learns a aggregated NSSM using data from source systems, and the (online) meta-inference phase quickly adapts this aggregated model to the target system using only a few data points and few online training iterations, based on local loss function gradients. The iMAML algorithm exploits the implicit function theorem to exactly compute the gradient during training, without relying on the entire optimization path. By focusing solely on the optimal solution, rather than the path, we can meta-train with less storage complexity and fewer approximations than other contemporary meta-learning algorithms. We demonstrate through numerical examples that our proposed method can yield accurate predictive models by adaptation, resulting in a downstream MPC that outperforms several baselines.
Safe Risk-averse Bayesian Optimization for Controller Tuning
Jun 23, 2023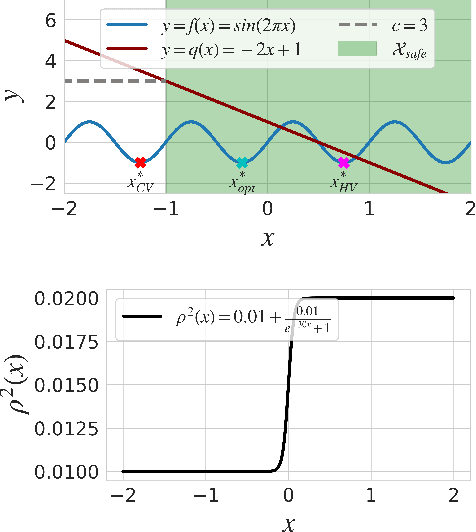
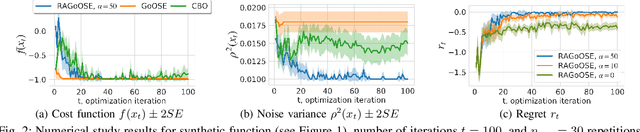
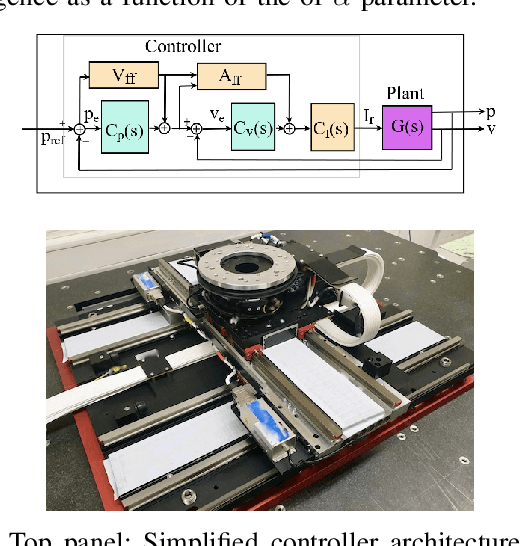
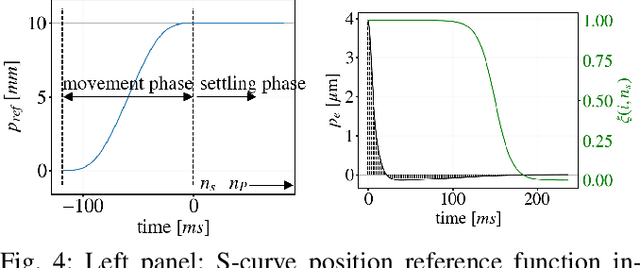
Controller tuning and parameter optimization are crucial in system design to improve both the controller and underlying system performance. Bayesian optimization has been established as an efficient model-free method for controller tuning and adaptation. Standard methods, however, are not enough for high-precision systems to be robust with respect to unknown input-dependent noise and stable under safety constraints. In this work, we present a novel data-driven approach, RaGoOSE, for safe controller tuning in the presence of heteroscedastic noise, combining safe learning with risk-averse Bayesian optimization. We demonstrate the method for synthetic benchmark and compare its performance to established BO-based tuning methods. We further evaluate RaGoOSE performance on a real precision-motion system utilized in semiconductor industry applications and compare it to the built-in auto-tuning routine.
Drone-based Volume Estimation in Indoor Environments
Nov 15, 2022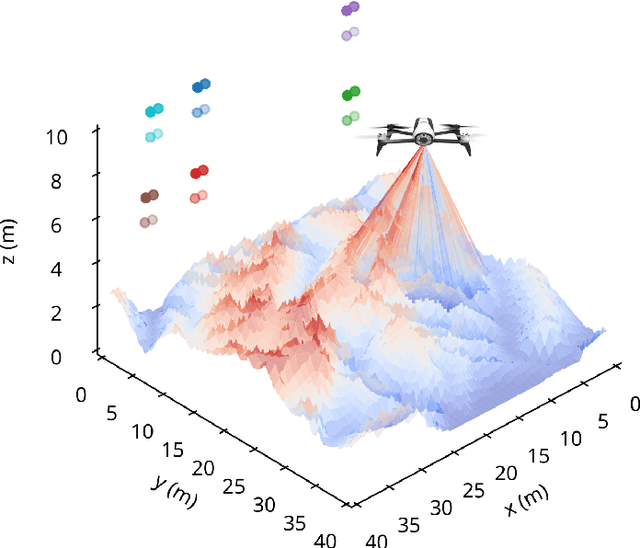
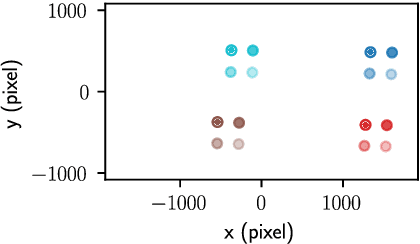
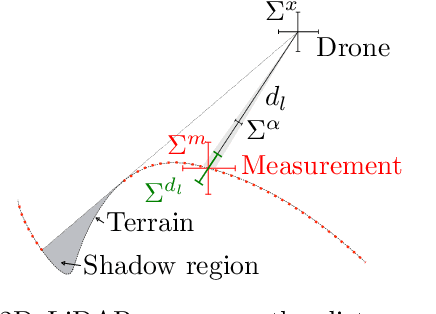
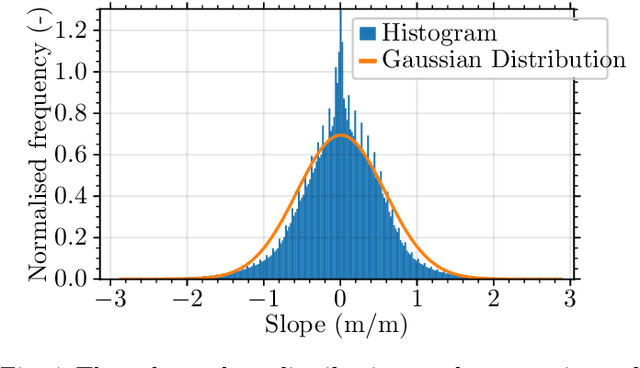
Volume estimation in large indoor spaces is an important challenge in robotic inspection of industrial warehouses. We propose an approach for volume estimation for autonomous systems using visual features for indoor localization and surface reconstruction from 2D-LiDAR measurements. A Gaussian Process-based model incorporates information collected from measurements given statistical prior information about the terrain, from which the volume estimate is computed. Our algorithm finds feasible trajectories which minimize the uncertainty of the volume estimate. We show results in simulation for the surface reconstruction and volume estimate of topographic data.
Meta-Learning Priors for Safe Bayesian Optimization
Oct 03, 2022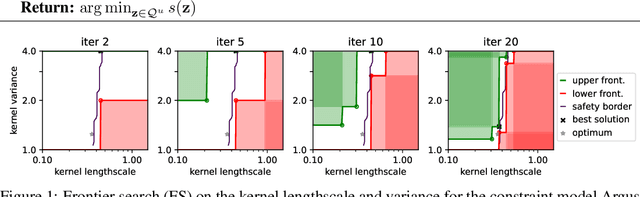
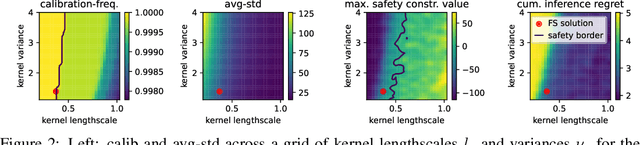

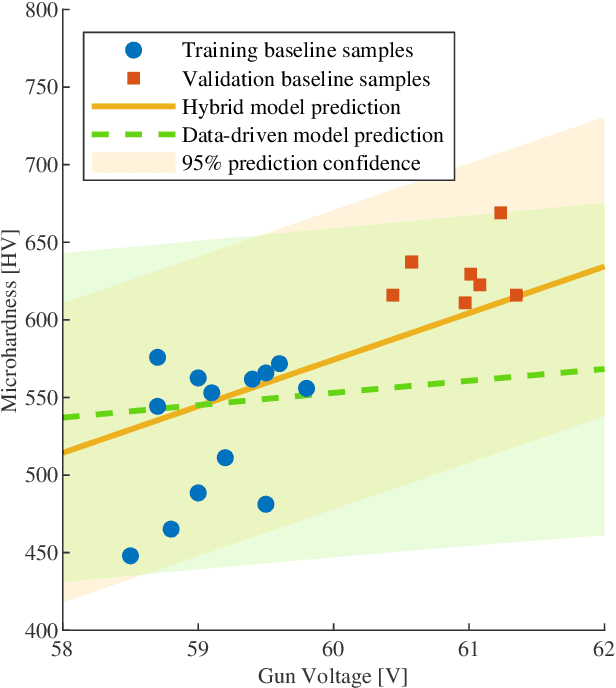
In robotics, optimizing controller parameters under safety constraints is an important challenge. Safe Bayesian optimization (BO) quantifies uncertainty in the objective and constraints to safely guide exploration in such settings. Hand-designing a suitable probabilistic model can be challenging, however. In the presence of unknown safety constraints, it is crucial to choose reliable model hyper-parameters to avoid safety violations. Here, we propose a data-driven approach to this problem by meta-learning priors for safe BO from offline data. We build on a meta-learning algorithm, F-PACOH, capable of providing reliable uncertainty quantification in settings of data scarcity. As core contribution, we develop a novel framework for choosing safety-compliant priors in a data-riven manner via empirical uncertainty metrics and a frontier search algorithm. On benchmark functions and a high-precision motion system, we demonstrate that our meta-learned priors accelerate the convergence of safe BO approaches while maintaining safety.
Data-driven Reference Trajectory Optimization for Precision Motion Systems
May 31, 2022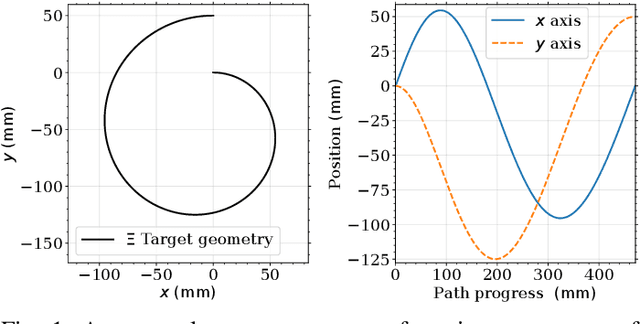
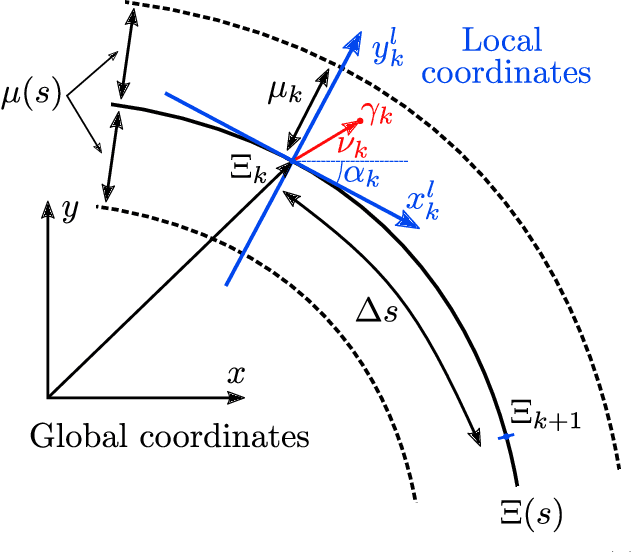
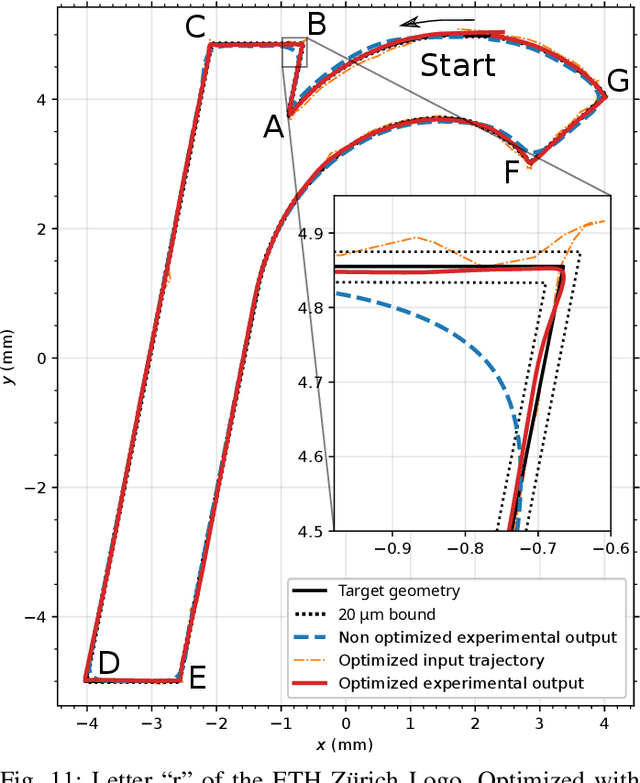
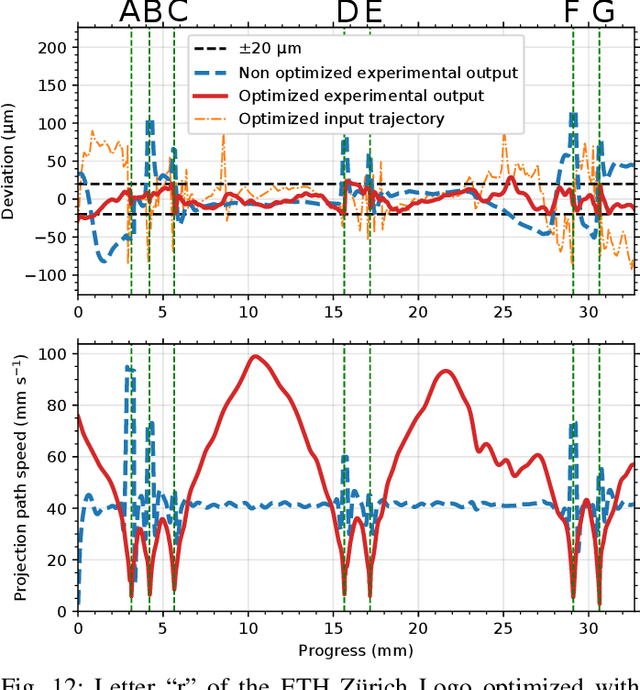
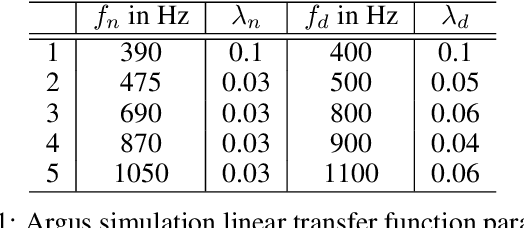
We propose an optimization-based method to improve contour tracking performance on precision motion stages by modifying the reference trajectory, without changing the built-in low-level controller. The position of the precision motion stage is predicted with data-driven models. First, a linear low-fidelity model is used to optimize traversal time, by changing the path velocity and acceleration profiles. Second, a non-linear high-fidelity model is used to refine the previously found time-optimal solution. We experimentally demonstrate that the method is capable of improving the productivity vs. accuracy trade-off for a high precision motion stage. Given the data-based nature of the models used, we claim that the method can easily be adapted to a wide family of precision motion systems.
Advanced Manufacturing Configuration by Sample-efficient Batch Bayesian Optimization
May 24, 2022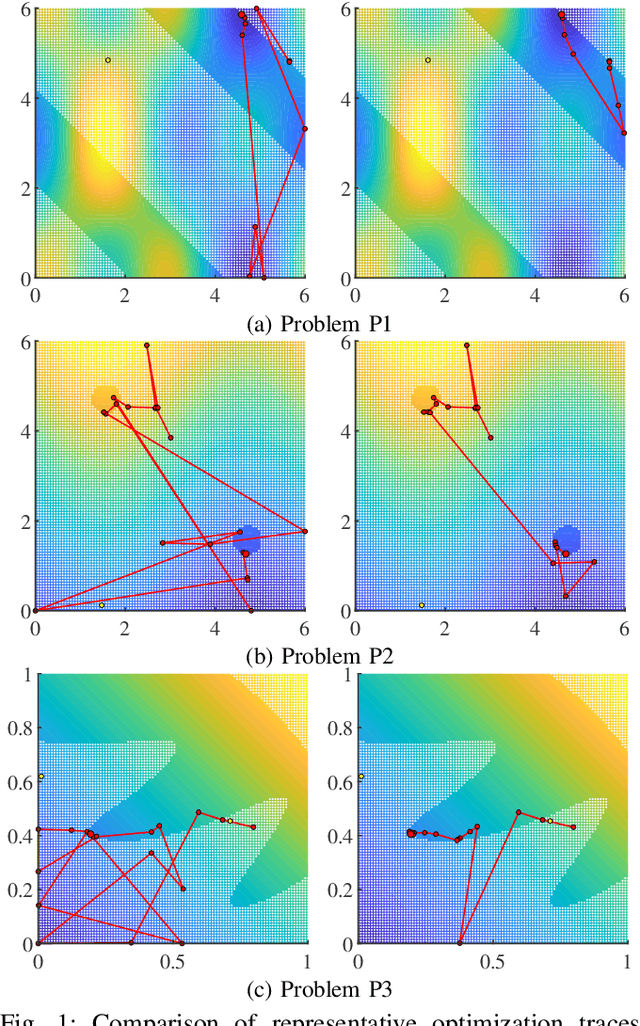
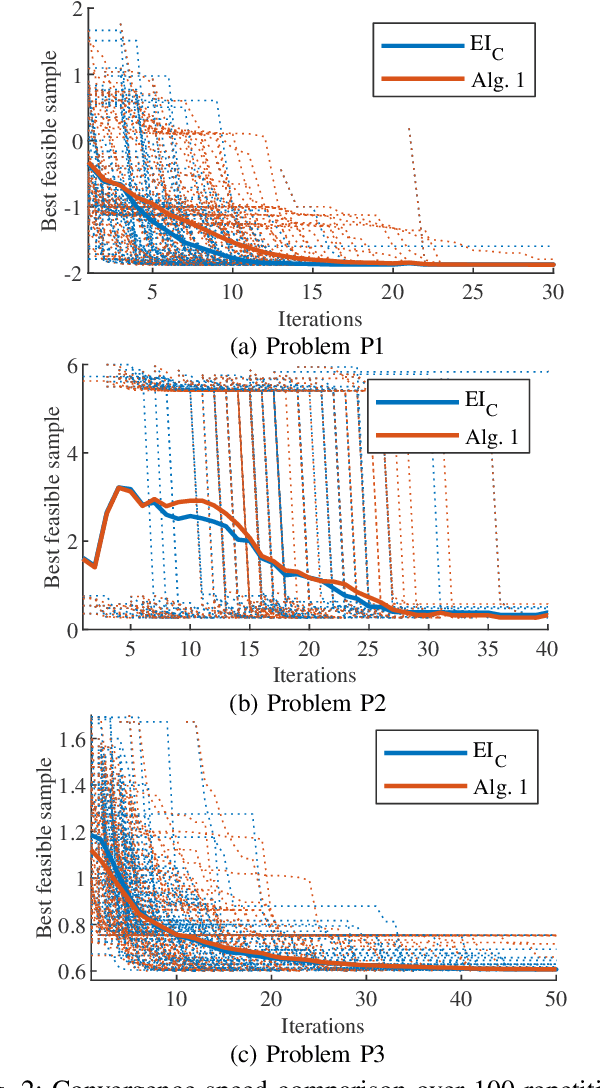
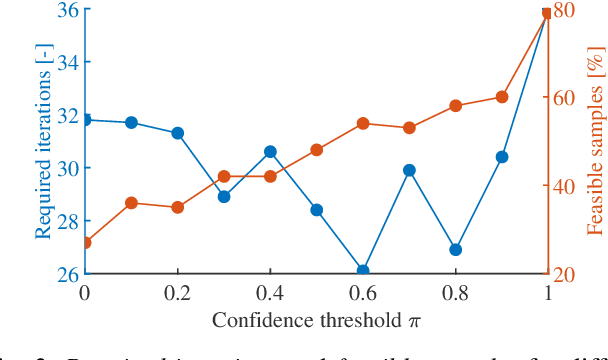
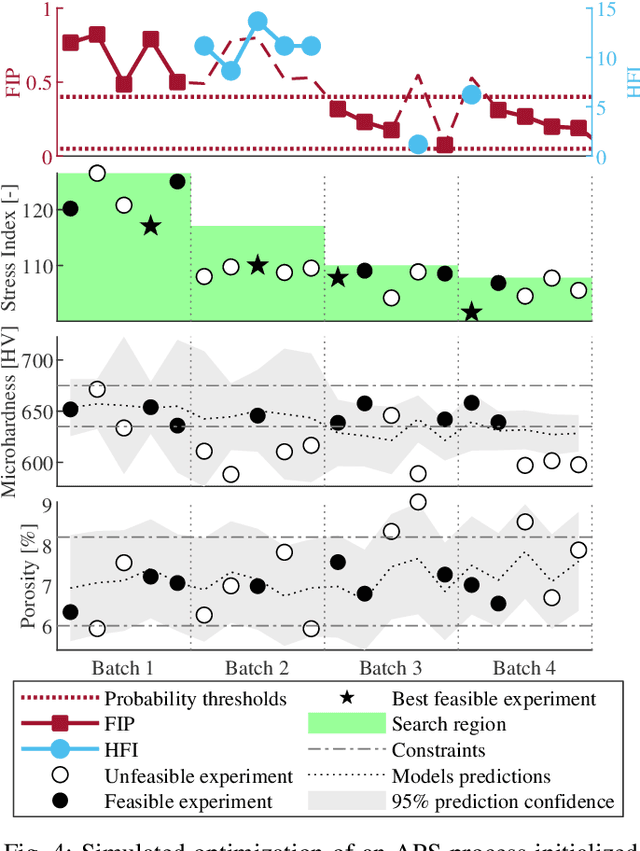
We propose a framework for the configuration and operation of expensive-to-evaluate advanced manufacturing methods, based on Bayesian optimization. The framework unifies a tailored acquisition function, a parallel acquisition procedure, and the integration of process information providing context to the optimization procedure. The novel acquisition function is demonstrated and analyzed on benchmark illustrative problems. We apply the optimization approach to atmospheric plasma spraying in simulation and experiments. Our results demonstrate that the proposed framework can efficiently find input parameters that produce the desired outcome and minimize the process cost.
Sample-efficient Plasma Spray Process Configuration with Constrained Bayesian Optimization
Mar 25, 2021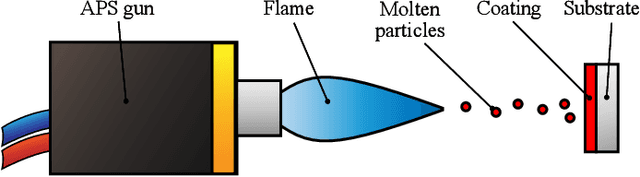
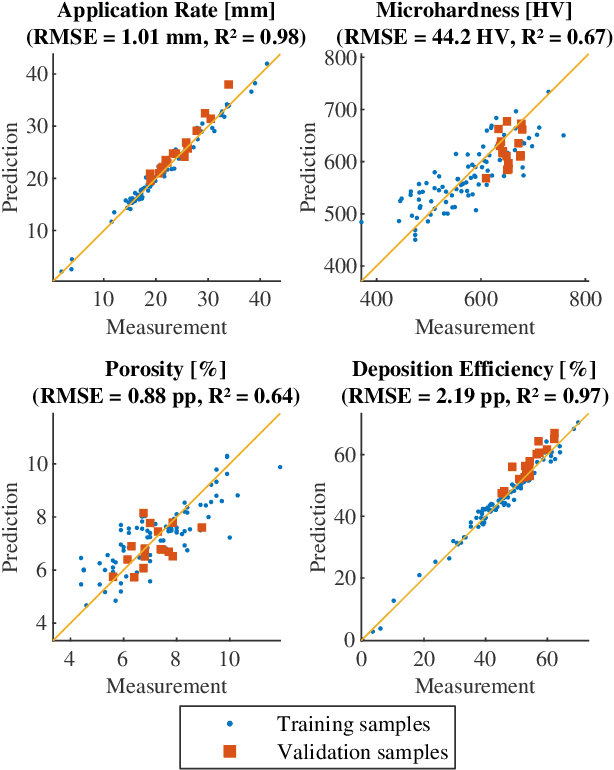
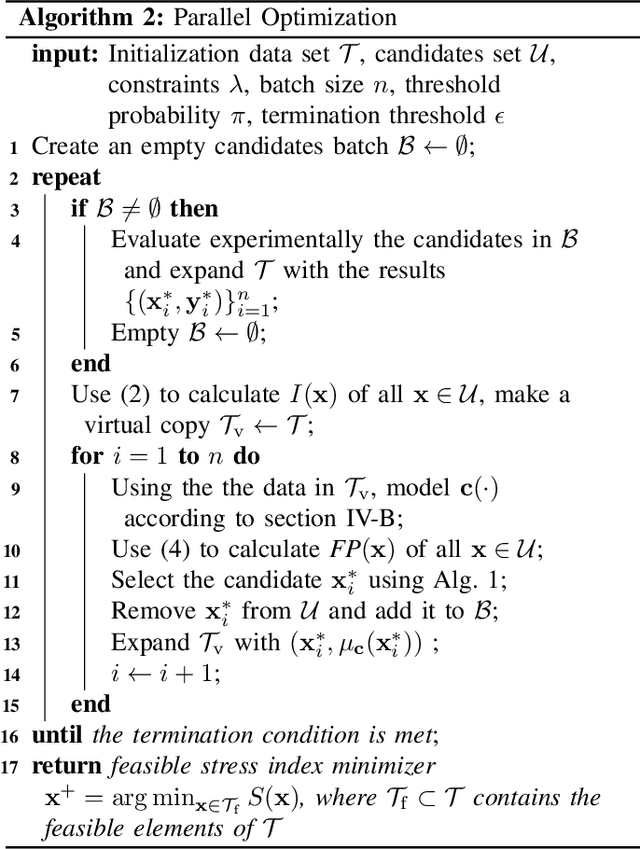
Recent work has shown constrained Bayesian optimization to be a powerful technique for the optimization of industrial processes. We adapt this framework to the set-up and optimization of atmospheric plasma spraying processes. We propose and validate a Gaussian process modeling structure to predict coatings properties. We introduce a parallel acquisition procedure tailored on the process characteristics and propose an algorithm that adapts to real-time process measurements to improve reproducibility. We validate our optimization method numerically and experimentally, and demonstrate that it can efficiently find input parameters that produce the desired coating and minimize the process cost.
Safe and Efficient Model-free Adaptive Control via Bayesian Optimization
Jan 19, 2021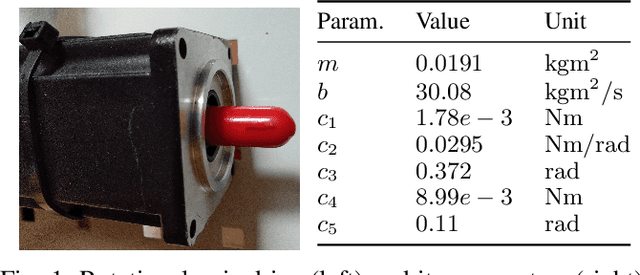
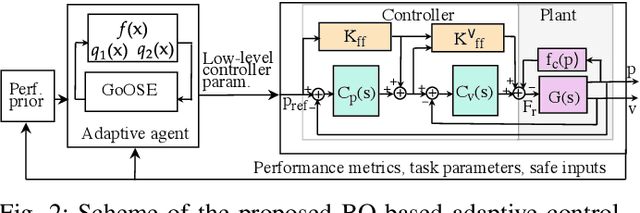

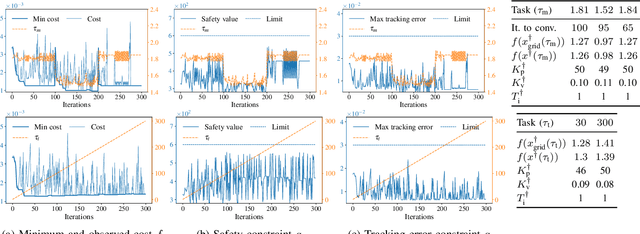
Adaptive control approaches yield high-performance controllers when a precise system model or suitable parametrizations of the controller are available. Existing data-driven approaches for adaptive control mostly augment standard model-based methods with additional information about uncertainties in the dynamics or about disturbances. In this work, we propose a purely data-driven, model-free approach for adaptive control. Tuning low-level controllers based solely on system data raises concerns on the underlying algorithm safety and computational performance. Thus, our approach builds on GoOSE, an algorithm for safe and sample-efficient Bayesian optimization. We introduce several computational and algorithmic modifications in GoOSE that enable its practical use on a rotational motion system. We numerically demonstrate for several types of disturbances that our approach is sample efficient, outperforms constrained Bayesian optimization in terms of safety, and achieves the performance optima computed by grid evaluation. We further demonstrate the proposed adaptive control approach experimentally on a rotational motion system.
Learning from Simulation, Racing in Reality
Nov 26, 2020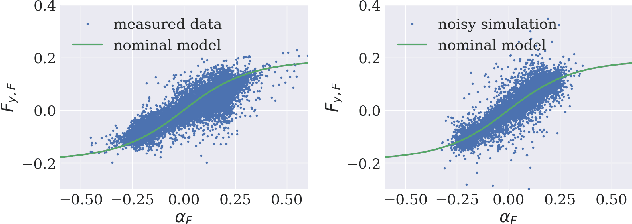
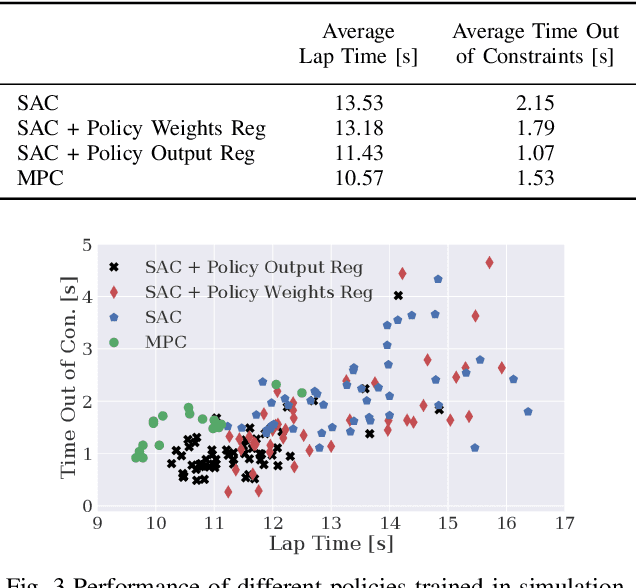
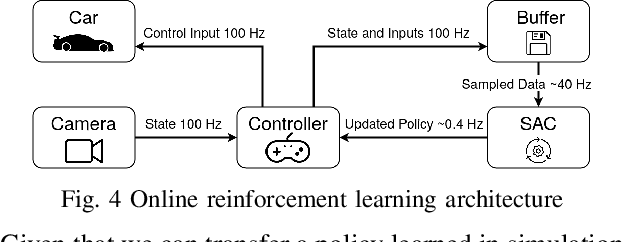
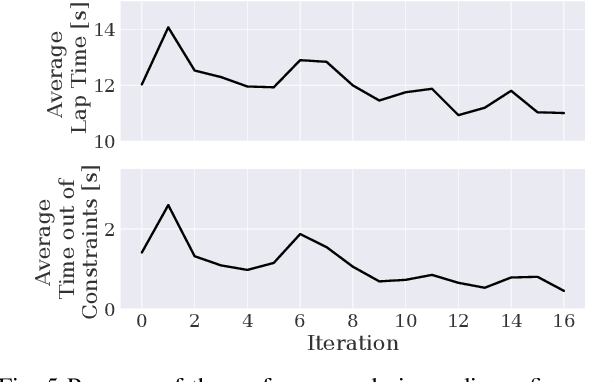
We present a reinforcement learning-based solution to autonomously race on a miniature race car platform. We show that a policy that is trained purely in simulation using a relatively simple vehicle model, including model randomization, can be successfully transferred to the real robotic setup. We achieve this by using novel policy output regularization approach and a lifted action space which enables smooth actions but still aggressive race car driving. We show that this regularized policy does outperform the Soft Actor Critic (SAC) baseline method, both in simulation and on the real car, but it is still outperformed by a Model Predictive Controller (MPC) state of the art method. The refinement of the policy with three hours of real-world interaction data allows the reinforcement learning policy to achieve lap times similar to the MPC controller while reducing track constraint violations by 50%.