 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJohn Lygeros
MPC of Uncertain Nonlinear Systems with Meta-Learning for Fast Adaptation of Neural Predictive Models
Apr 18, 2024
In this paper, we consider the problem of reference tracking in uncertain nonlinear systems. A neural State-Space Model (NSSM) is used to approximate the nonlinear system, where a deep encoder network learns the nonlinearity from data, and a state-space component captures the temporal relationship. This transforms the nonlinear system into a linear system in a latent space, enabling the application of model predictive control (MPC) to determine effective control actions. Our objective is to design the optimal controller using limited data from the \textit{target system} (the system of interest). To this end, we employ an implicit model-agnostic meta-learning (iMAML) framework that leverages information from \textit{source systems} (systems that share similarities with the target system) to expedite training in the target system and enhance its control performance. The framework consists of two phases: the (offine) meta-training phase learns a aggregated NSSM using data from source systems, and the (online) meta-inference phase quickly adapts this aggregated model to the target system using only a few data points and few online training iterations, based on local loss function gradients. The iMAML algorithm exploits the implicit function theorem to exactly compute the gradient during training, without relying on the entire optimization path. By focusing solely on the optimal solution, rather than the path, we can meta-train with less storage complexity and fewer approximations than other contemporary meta-learning algorithms. We demonstrate through numerical examples that our proposed method can yield accurate predictive models by adaptation, resulting in a downstream MPC that outperforms several baselines.
Finite Sample Frequency Domain Identification
Apr 01, 2024We study non-parametric frequency-domain system identification from a finite-sample perspective. We assume an open loop scenario where the excitation input is periodic and consider the Empirical Transfer Function Estimate (ETFE), where the goal is to estimate the frequency response at certain desired (evenly-spaced) frequencies, given input-output samples. We show that under sub-Gaussian colored noise (in time-domain) and stability assumptions, the ETFE estimates are concentrated around the true values. The error rate is of the order of $\mathcal{O}((d_{\mathrm{u}}+\sqrt{d_{\mathrm{u}}d_{\mathrm{y}}})\sqrt{M/N_{\mathrm{tot}}})$, where $N_{\mathrm{tot}}$ is the total number of samples, $M$ is the number of desired frequencies, and $d_{\mathrm{u}},\,d_{\mathrm{y}}$ are the dimensions of the input and output signals respectively. This rate remains valid for general irrational transfer functions and does not require a finite order state-space representation. By tuning $M$, we obtain a $N_{\mathrm{tot}}^{-1/3}$ finite-sample rate for learning the frequency response over all frequencies in the $ \mathcal{H}_{\infty}$ norm. Our result draws upon an extension of the Hanson-Wright inequality to semi-infinite matrices. We study the finite-sample behavior of ETFE in simulations.
Online Identification of Stochastic Continuous-Time Wiener Models Using Sampled Data
Mar 09, 2024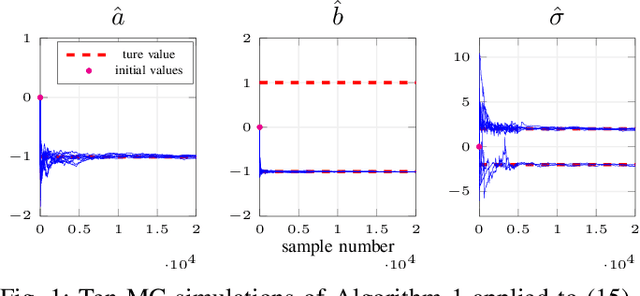
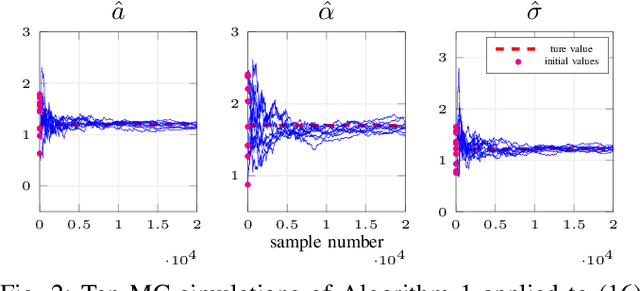
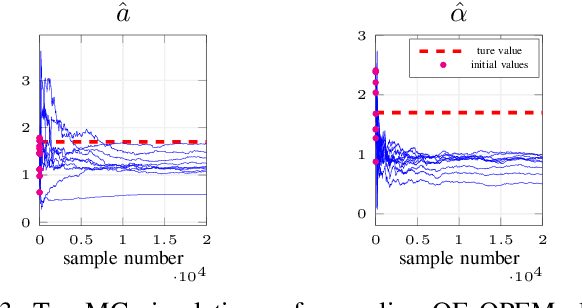
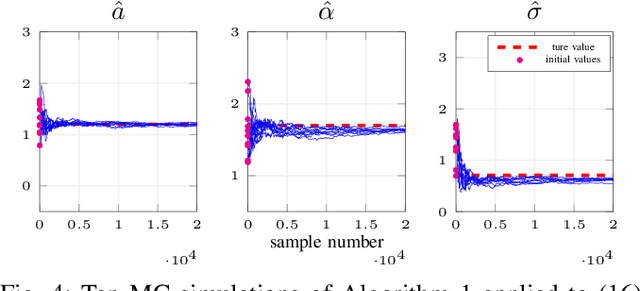
It is well known that ignoring the presence of stochastic disturbances in the identification of stochastic Wiener models leads to asymptotically biased estimators. On the other hand, optimal statistical identification, via likelihood-based methods, is sensitive to the assumptions on the data distribution and is usually based on relatively complex sequential Monte Carlo algorithms. We develop a simple recursive online estimation algorithm based on an output-error predictor, for the identification of continuous-time stochastic parametric Wiener models through stochastic approximation. The method is applicable to generic model parameterizations and, as demonstrated in the numerical simulation examples, it is robust with respect to the assumptions on the spectrum of the disturbance process.
Predictive Linear Online Tracking for Unknown Targets
Feb 15, 2024In this paper, we study the problem of online tracking in linear control systems, where the objective is to follow a moving target. Unlike classical tracking control, the target is unknown, non-stationary, and its state is revealed sequentially, thus, fitting the framework of online non-stochastic control. We consider the case of quadratic costs and propose a new algorithm, called predictive linear online tracking (PLOT). The algorithm uses recursive least squares with exponential forgetting to learn a time-varying dynamic model of the target. The learned model is used in the optimal policy under the framework of receding horizon control. We show the dynamic regret of PLOT scales with $\mathcal{O}(\sqrt{TV_T})$, where $V_T$ is the total variation of the target dynamics and $T$ is the time horizon. Unlike prior work, our theoretical results hold for non-stationary targets. We implement PLOT on a real quadrotor and provide open-source software, thus, showcasing one of the first successful applications of online control methods on real hardware.
Towards a Systems Theory of Algorithms
Jan 25, 2024Traditionally, numerical algorithms are seen as isolated pieces of code confined to an {\em in silico} existence. However, this perspective is not appropriate for many modern computational approaches in control, learning, or optimization, wherein {\em in vivo} algorithms interact with their environment. Examples of such {\em open} include various real-time optimization-based control strategies, reinforcement learning, decision-making architectures, online optimization, and many more. Further, even {\em closed} algorithms in learning or optimization are increasingly abstracted in block diagrams with interacting dynamic modules and pipelines. In this opinion paper, we state our vision on a to-be-cultivated {\em systems theory of algorithms} and argue in favour of viewing algorithms as open dynamical systems interacting with other algorithms, physical systems, humans, or databases. Remarkably, the manifold tools developed under the umbrella of systems theory also provide valuable insights into this burgeoning paradigm shift and its accompanying challenges in the algorithmic world. We survey various instances where the principles of algorithmic systems theory are being developed and outline pertinent modeling, analysis, and design challenges.
Urban traffic congestion control: a DeePC change
Nov 16, 2023Urban traffic congestion remains a pressing challenge in our rapidly expanding cities, despite the abundance of available data and the efforts of policymakers. By leveraging behavioral system theory and data-driven control, this paper exploits the DeePC algorithm in the context of urban traffic control performed via dynamic traffic lights. To validate our approach, we consider a high-fidelity case study using the state-of-the-art simulation software package Simulation of Urban MObility (SUMO). Preliminary results indicate that DeePC outperforms existing approaches across various key metrics, including travel time and CO$_2$ emissions, demonstrating its potential for effective traffic management
Stochastic MPC for energy hubs using data driven demand forecasting
Apr 24, 2023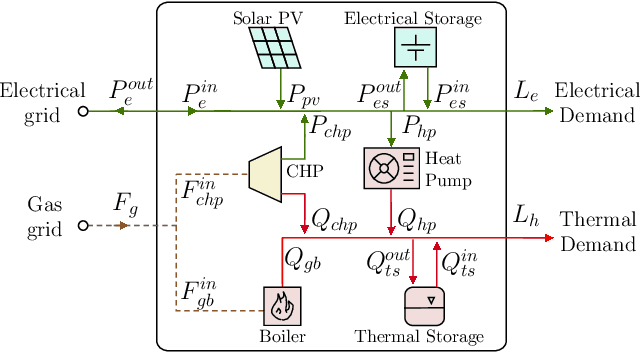
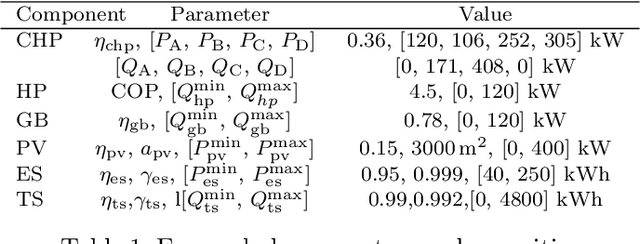
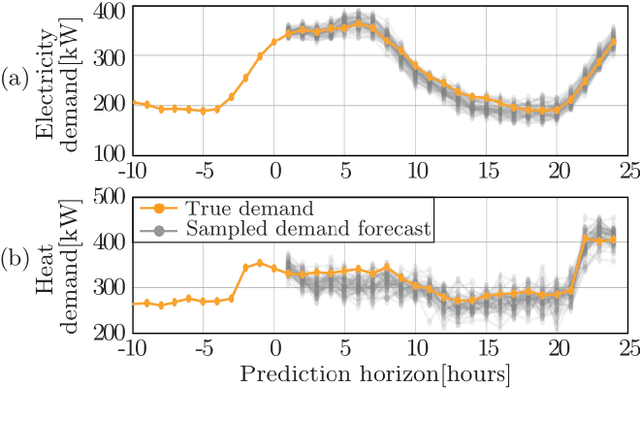
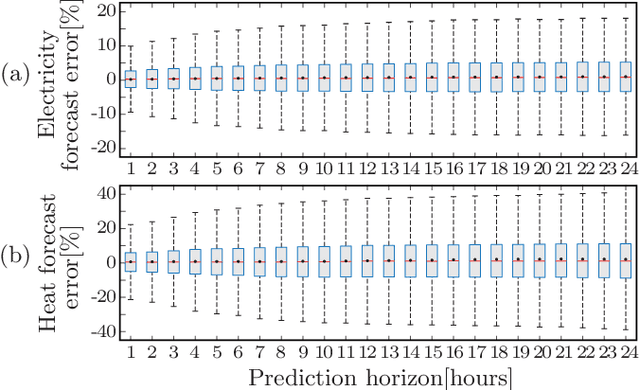
Energy hubs convert and distribute energy resources by combining different energy inputs through multiple conversion and storage components. The optimal operation of the energy hub exploits its flexibility to increase the energy efficiency and reduce the operational costs. However, uncertainties in the demand present challenges to energy hub optimization. In this paper, we propose a stochastic MPC controller to minimize energy costs using chance constraints for the uncertain electricity and thermal demands. Historical data is used to build a demand prediction model based on Gaussian processes to generate a forecast of the future electricity and heat demands. The stochastic optimization problem is solved via the Scenario Approach by sampling multi-step demand trajectories from the derived prediction model. The performance of the proposed predictor and of the stochastic controller is verified on a simulated energy hub model and demand data from a real building.
Designing Optimal Personalized Incentive for Traffic Routing using BIG Hype algorithm
Apr 24, 2023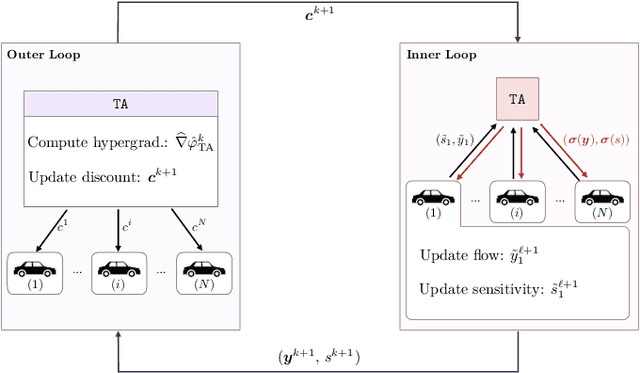
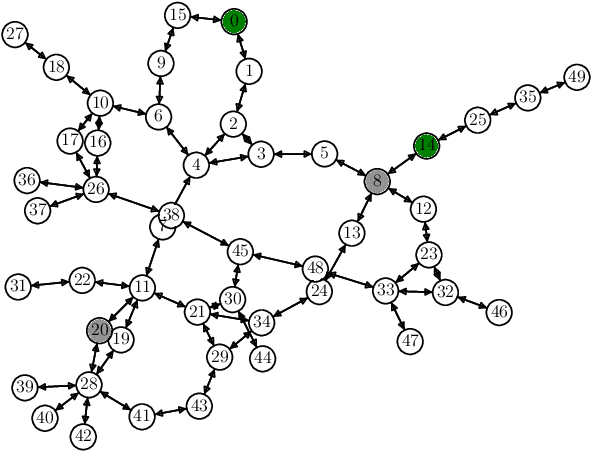
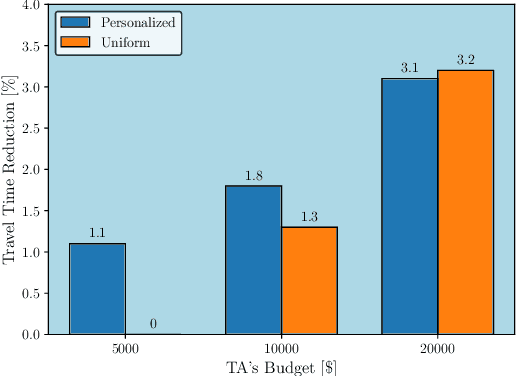
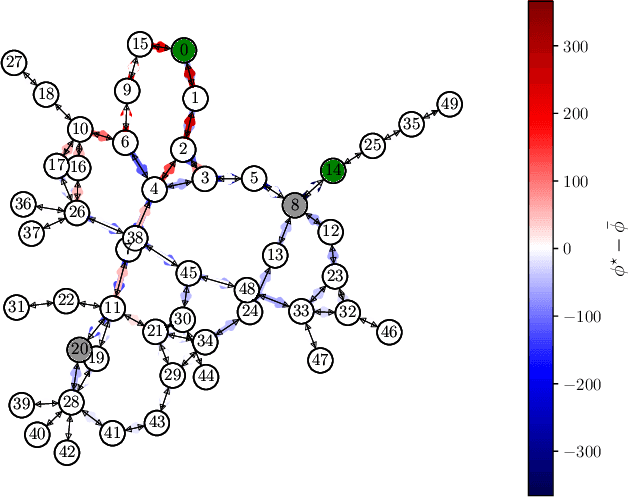
We study the problem of optimally routing plug-in electric and conventional fuel vehicles on a city level. In our model, commuters selfishly aim to minimize a local cost that combines travel time, from a fixed origin to a desired destination, and the monetary cost of using city facilities, parking or service stations. The traffic authority can influence the commuters' preferred routing choice by means of personalized discounts on parking tickets and on the energy price at service stations. We formalize the problem of designing these monetary incentives optimally as a large-scale bilevel game, where constraints arise at both levels due to the finite capacities of city facilities and incentives budget. Then, we develop an efficient decentralized solution scheme with convergence guarantees based on BIG Hype, a recently-proposed hypergradient-based algorithm for hierarchical games. Finally, we validate our model via numerical simulations over the Anaheim's network, and show that the proposed approach produces sensible results in terms of traffic decongestion and it is able to solve in minutes problems with more than 48000 variables and 110000 constraints.
Optimal service station design for traffic mitigation via genetic algorithm and neural network
Nov 18, 2022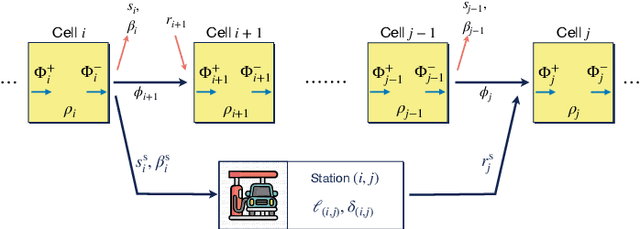
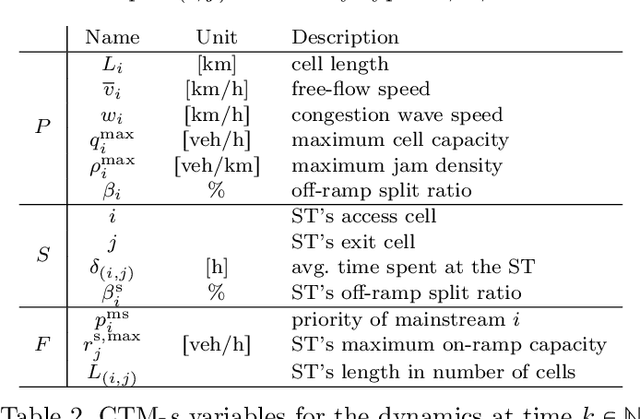
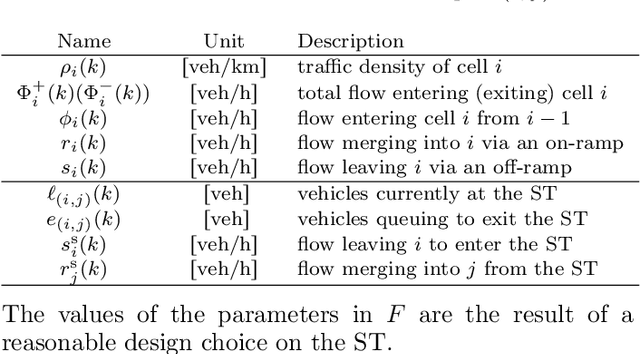
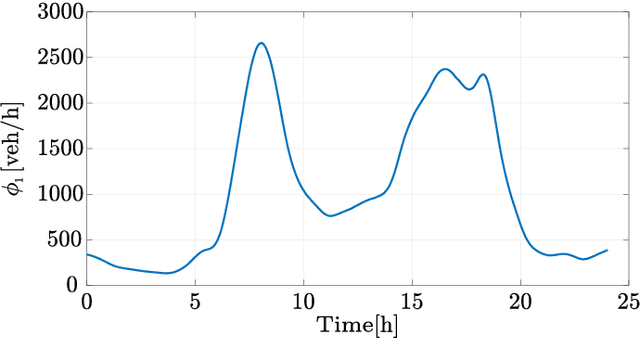
This paper analyzes how the presence of service stations on highways affects traffic congestion. We focus on the problem of optimally designing a service station to achieve beneficial effects in terms of total traffic congestion and peak traffic reduction. Microsimulators cannot be used for this task due to their computational inefficiency. We propose a genetic algorithm based on the recently proposed CTMs, that efficiently describes the dynamics of a service station. Then, we leverage the algorithm to train a neural network capable of solving the same problem, avoiding implementing the CTMs. Finally, we examine two case studies to validate the capabilities and performance of our algorithms. In these simulations, we use real data extracted from Dutch highways.
Drone-based Volume Estimation in Indoor Environments
Nov 15, 2022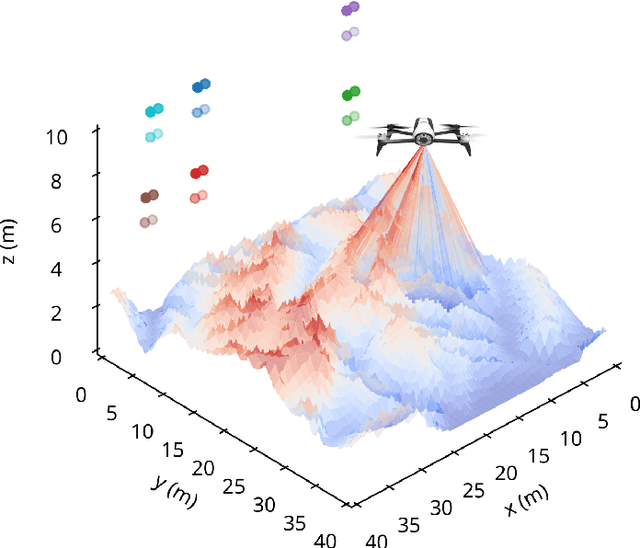
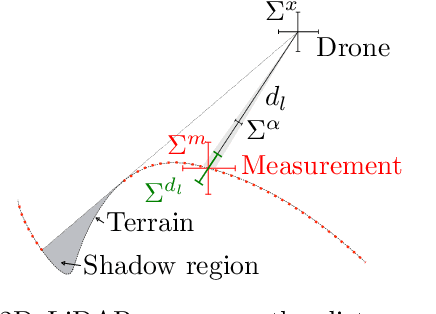
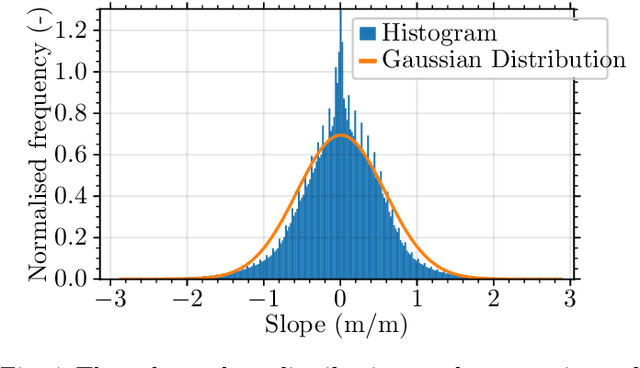
Volume estimation in large indoor spaces is an important challenge in robotic inspection of industrial warehouses. We propose an approach for volume estimation for autonomous systems using visual features for indoor localization and surface reconstruction from 2D-LiDAR measurements. A Gaussian Process-based model incorporates information collected from measurements given statistical prior information about the terrain, from which the volume estimate is computed. Our algorithm finds feasible trajectories which minimize the uncertainty of the volume estimate. We show results in simulation for the surface reconstruction and volume estimate of topographic data.