 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAllison M. Okamura
phloSAR: a Portable, High-Flow Pressure Supply and Regulator Enabling Untethered Operation of Large Pneumatic Soft Robots
Mar 02, 2024
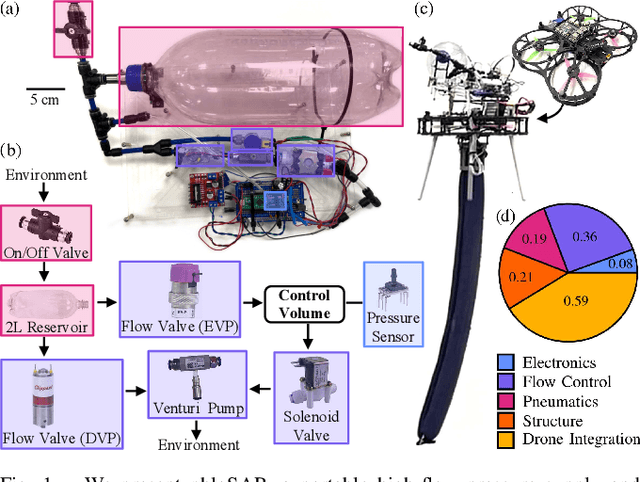
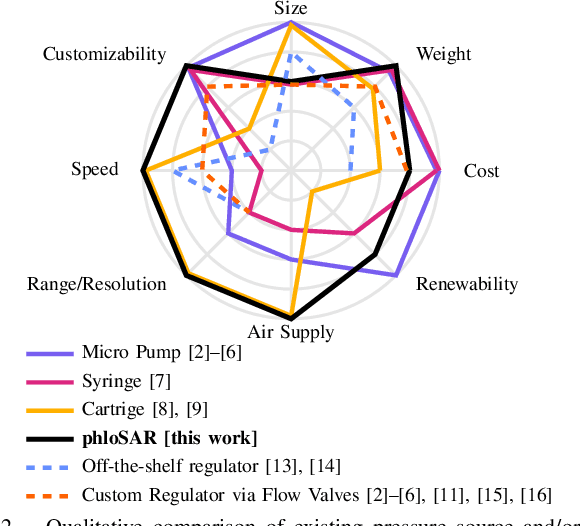
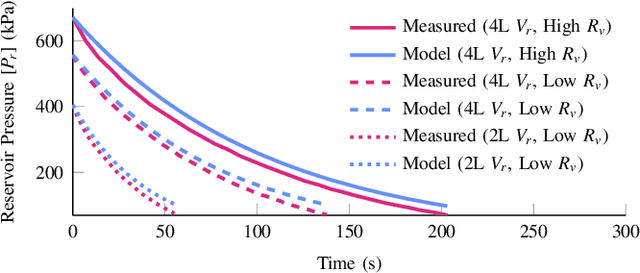
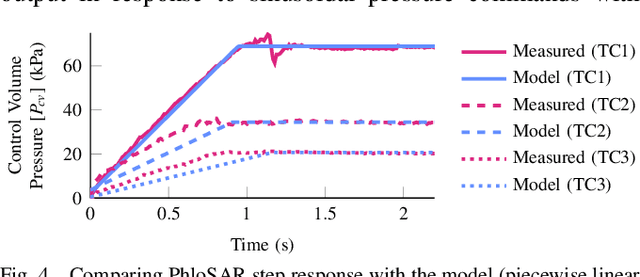
Pneumatic actuation benefits soft robotics by facilitating compliance, enabling large volume change, and concentrating actuator weight away from the end-effector. However, portability is compromised when pneumatic actuators are tethered to cumbersome air and power supplies. While there are existing options for portable pneumatic systems, they are limited in dynamic capabilities, constraining their applicability to low pressure and/or small-volume soft robots. In this work, we propose a portable, high-flow pressure supply and regulator (phloSAR) for use in untethered, weight-constrained, dynamic soft robot applications. PhloSAR leverages high-flow proportional valves, an integrated pressure reservoir, and Venturi vacuum generation to achieve portability and dynamic performance. We present a set of models that describe the system dynamics, experimentally validate them on physical hardware, and discuss the influence of design parameters on system operation. Lastly, we integrate a proof-of-concept prototype with a soft robot arm mounted on an aerial vehicle to demonstrate the system's applicability to mobile robotics. Our system enables new opportunities in mobile soft robotics by making untethered pneumatic supply and regulation available to a wider range of soft robots.
Haptic Guidance and Haptic Error Amplification in a Virtual Surgical Robotic Training Environment
Sep 11, 2023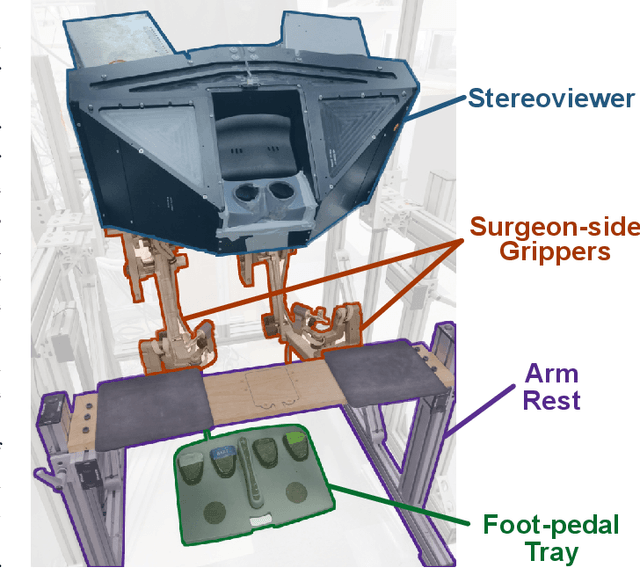
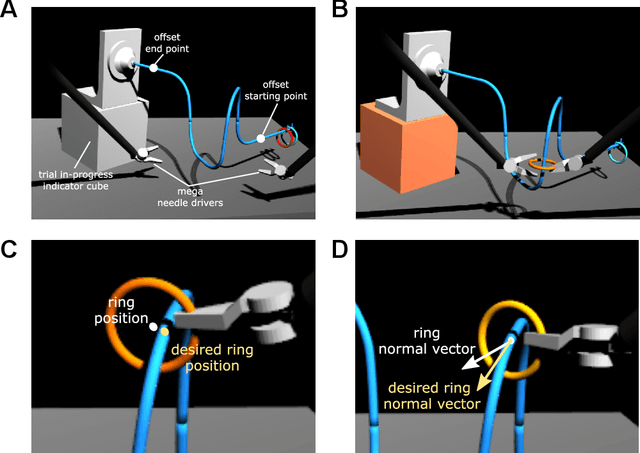
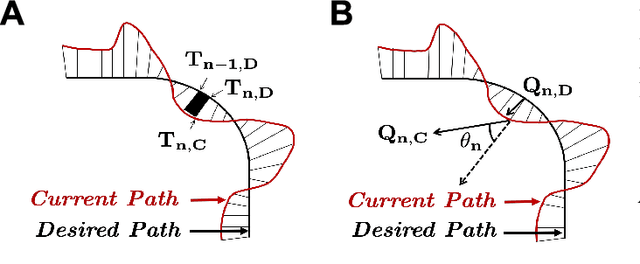
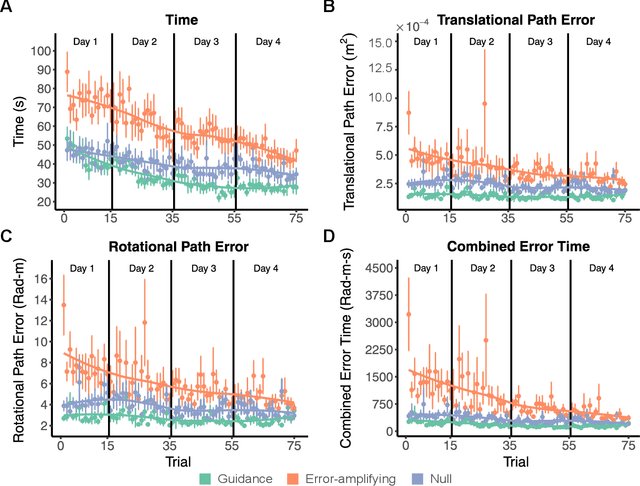
Teleoperated robotic systems have introduced more intuitive control for minimally invasive surgery, but the optimal method for training remains unknown. Recent motor learning studies have demonstrated that exaggeration of errors helps trainees learn to perform tasks with greater speed and accuracy. We hypothesized that training in a force field that pushes the operator away from a desired path would improve their performance on a virtual reality ring-on-wire task. Forty surgical novices trained under a no-force, guidance, or error-amplifying force field over five days. Completion time, translational and rotational path error, and combined error-time were evaluated under no force field on the final day. The groups significantly differed in combined error-time, with the guidance group performing the worst. Error-amplifying field participants showed the most improvement and did not plateau in their performance during training, suggesting that learning was still ongoing. Guidance field participants had the worst performance on the final day, confirming the guidance hypothesis. Participants with high initial path error benefited more from guidance. Participants with high initial combined error-time benefited more from guidance and error-amplifying force field training. Our results suggest that error-amplifying and error-reducing haptic training for robot-assisted telesurgery benefits trainees of different abilities differently.
Stiffness Change for Reconfiguration of Inflated Beam Robots
Jul 06, 2023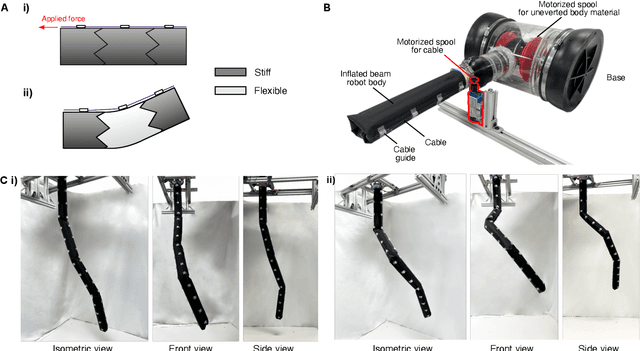
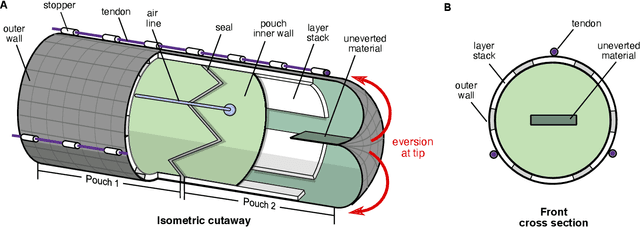
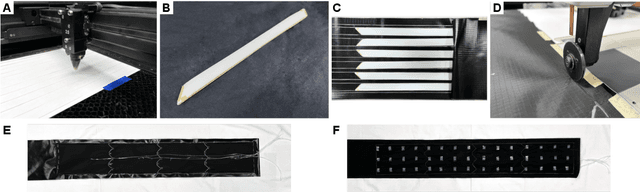
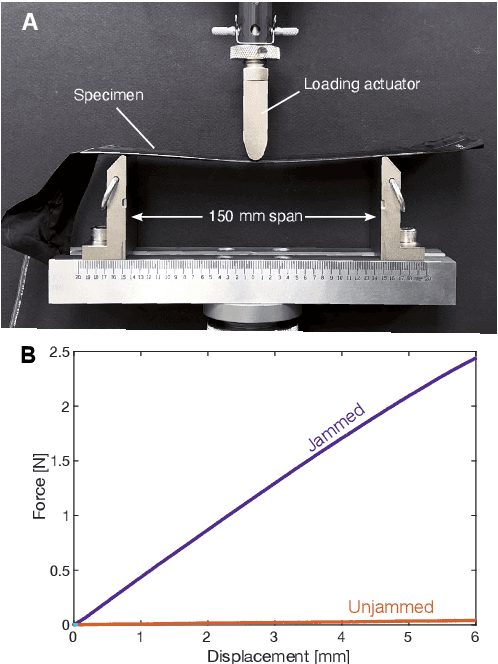
Active control of the shape of soft robots is challenging. Despite having an infinite number of passive degrees of freedom (DOFs), soft robots typically only have a few actively controllable DOFs, limited by the number of degrees of actuation (DOAs). The complexity of actuators restricts the number of DOAs that can be incorporated into soft robots. Active shape control is further complicated by the buckling of soft robots under compressive forces; this is particularly challenging for compliant continuum robots due to their long aspect ratios. In this work, we show how variable stiffness can enable shape control of soft robots by addressing these challenges. Dynamically changing the stiffness of sections along a compliant continuum robot can selectively "activate" discrete joints. By changing which joints are activated, the output of a single actuator can be reconfigured to actively control many different joints, thus decoupling the number of controllable DOFs from the number of DOAs. We demonstrate embedded positive pressure layer jamming as a simple method for stiffness change in inflated beam robots, its compatibility with growing robots, and its use as an "activating" technology. We experimentally characterize the stiffness change in a growing inflated beam robot and present finite element models which serve as guides for robot design and fabrication. We fabricate a multi-segment everting inflated beam robot and demonstrate how stiffness change is compatible with growth through tip eversion, enables an increase in workspace, and achieves new actuation patterns not possible without stiffening.
Finite Element Modeling of Pneumatic Bending Actuators for Inflated-Beam Robots
Jun 06, 2023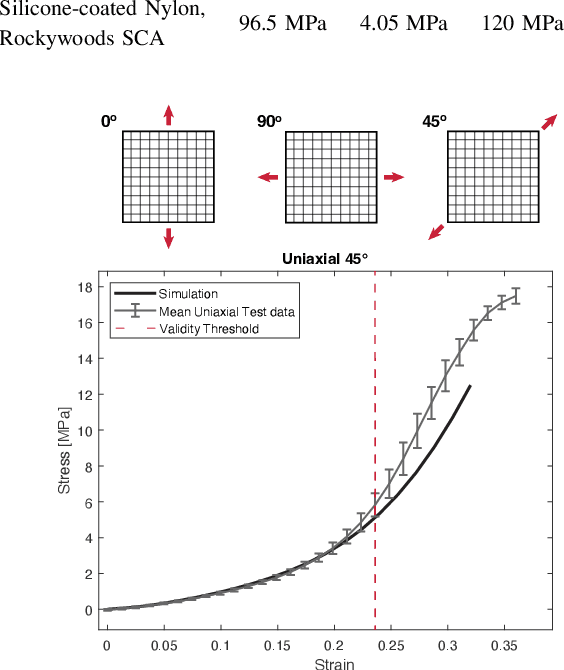
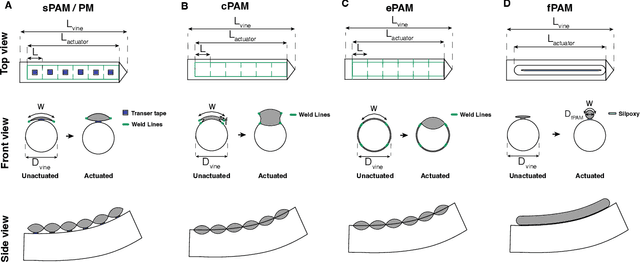
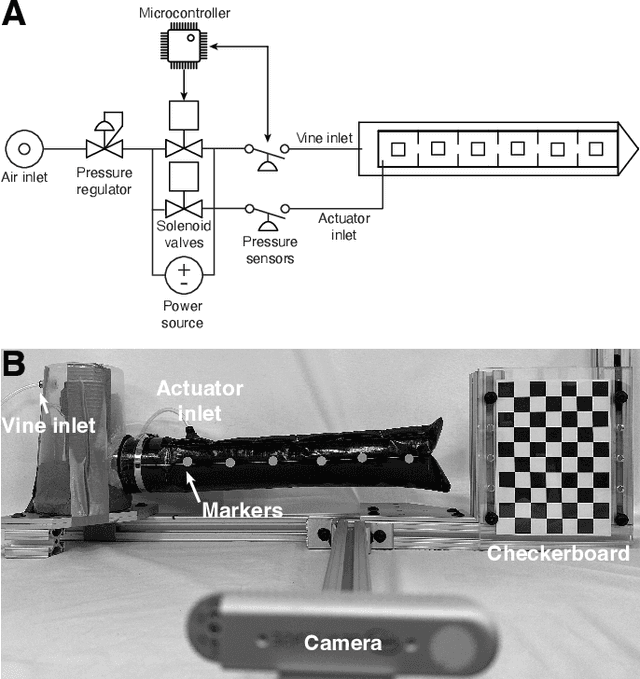
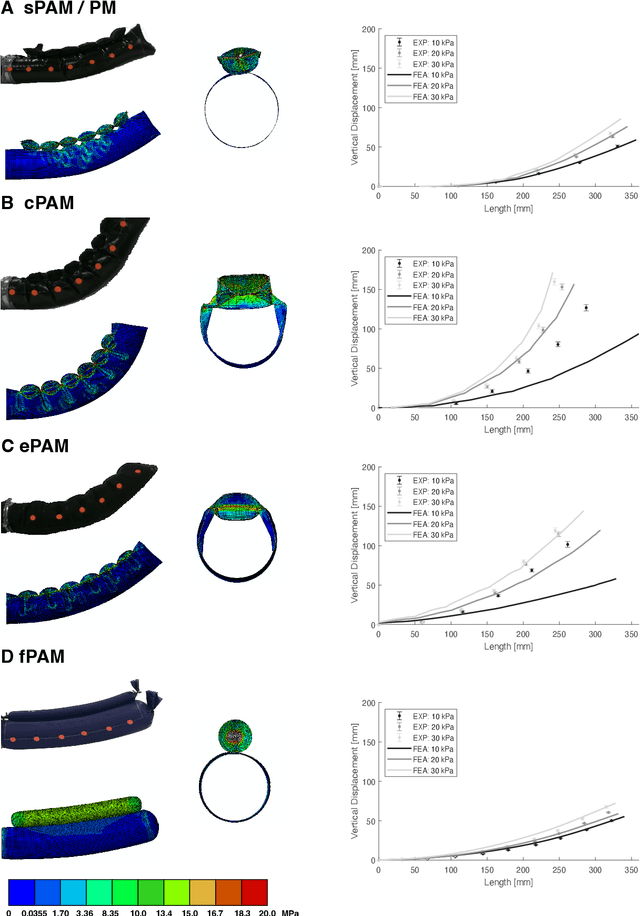
Inflated-beam soft robots, such as tip-everting vine robots, can control their curvature by contracting one side of the beam using pneumatic actuation. In this work, a general finite element modeling approach is developed and applied to characterize bending of inflated-beam soft robots. The model is tested on four types of pneumatic actuators used in these robots (series, compression, embedded, and fabric pneumatic artificial muscles) and can be extended to other designs. Actuators rely on two types of bending mechanisms: geometry-based contraction and material-based contraction. Geometry-based contraction implies shape-change of the muscles from a flat to an inflated shortened configuration that causes buckling of the inflated beam. Material-based contraction relies on material anisotropy to produce a contraction effect. The model depicts both mechanisms and accommodates for the complex and highly nonlinear effects of buckling and anisotropy. Simulation results are verified experimentally for each actuator type at three working pressures (10, 20, and 30 kPa). Geometry-based contraction achieves the largest deformation at accuracy values of 92.1% and higher once the buckling pattern is established, and 80.7% and higher for lower pressures due to the stress singularities occurring with buckling formation. Material-based contraction achieves smaller bending angles but is at least 96.7% accurate. The models are freely available online, and can thus be used by others to design inflated-beam robots, such as tip-everting vine robots. Labor and material waste can be reduced with this tool by optimizing designs that use knowledge of material properties and stress to distributions to enable bending and manage stress peaks.
Configuration and Fabrication of Preformed Vine Robots
Jun 01, 2023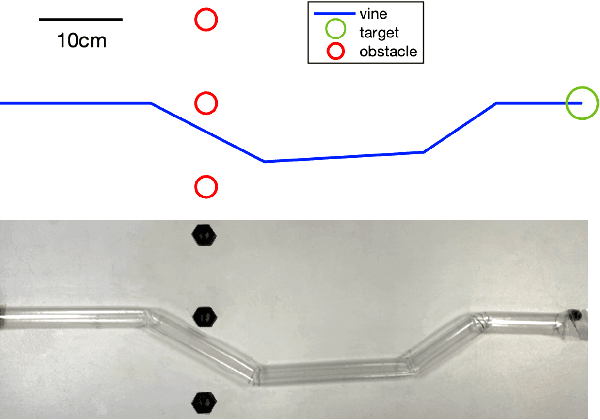
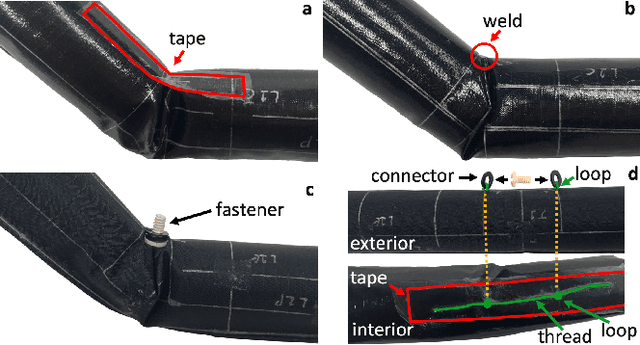
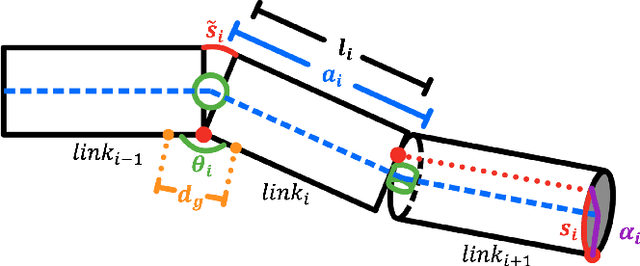
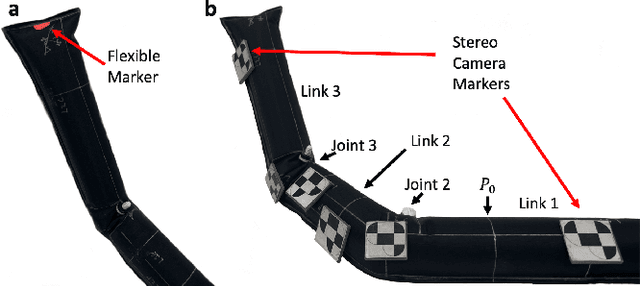
Vine robots are a class of soft continuum robots that grow via tip eversion, allowing them to move their tip without relying on reaction forces from the environment. Constructed from compliant materials such as fabric and thin, flexible plastic, these robots are able to grow many times their original length with the use of fluidic pressure. They can be mechanically programmed/preformed to follow a desired path during growth by changing the structure of their body prior to deployment. We present a model for fabricating preformed vine robots with discrete bends. We apply this model across combinations of three fabrication methods and two materials. One fabrication method, taping folds into the robot body, is from the literature. The other two methods, welding folds and connecting fasteners embedded in the robot body, are novel. Measurements show the ability of the resulting vine robots to follow a desired path and show that fabrication method has a significant impact. Results include bend angles with as little as 0.12 degrees of error, and segment lengths with as low as 0.36 mm of error. The required growth pressure and average growth speed of these preformed vine robots ranged from 11.5 to 23.7kPA and 3.75 to 10 cm/s, respectively. These results validate the use of preformed vine robots for deployment along known paths, and serve as a guide for choosing a fabrication method and material combination based on the specific needs of the task.
A Comparison of Pneumatic Actuators for Soft Growing Vine Robots
May 01, 2023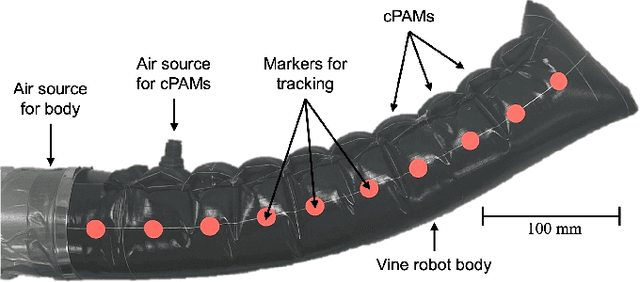
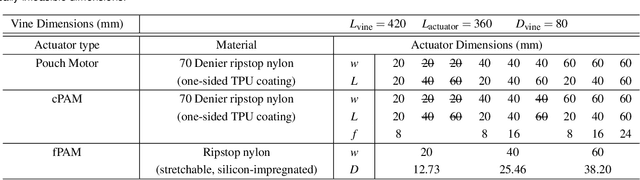
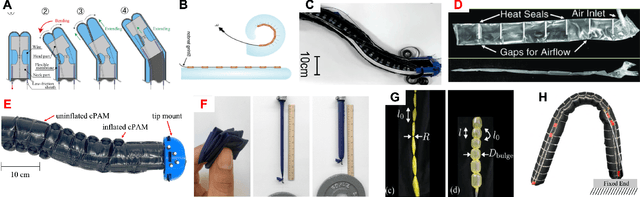
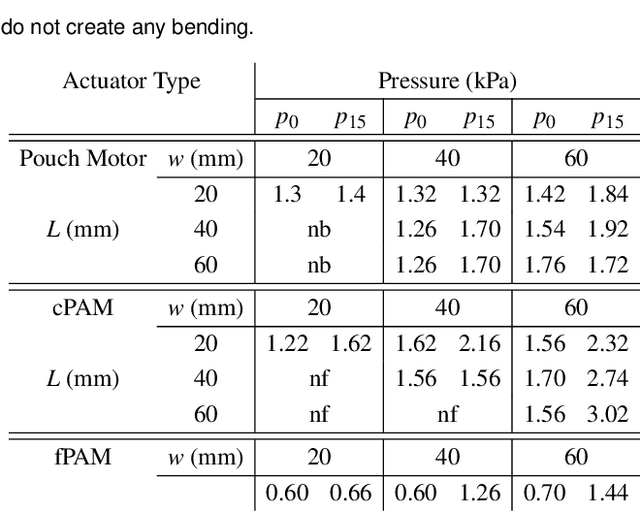
Soft pneumatic actuators are used to steer soft growing "vine" robots while being flexible enough to undergo the tip eversion required for growth. They also meet the requirements to steer soft growing vine robots through challenging terrain. In this study, we compared the performance of three types of pneumatic actuators in terms of their ability to perform eversion, bending, dynamic motion, and force: the pouch motor, the cylindrical pneumatic artificial muscle (cPAM), and the fabric pneumatic artificial muscle (fPAM). The pouch motor is advantageous for prototyping due to its simple manufacturing process. The cPAM exhibits superior bending behavior and produces the highest forces, while the fPAM actuates fastest and everts at the lowest pressure. We evaluated a similar range of dimensions for each actuator type. Larger actuators can produce more significant deformations and forces, but smaller actuators inflate more quickly and require a lower eversion pressure. Since vine robots are lightweight, the effect of gravity on the functionality of different actuators is minimal. We developed a new analytical model that predicts the pressure-to-bending behavior of vine robot actuators. Using the actuator results, we designed and demonstrated a 4.8 m long vine robot equipped with highly maneuverable 60x60 mm cPAMs in a three-dimensional obstacle course. The vine robot was able to move around sharp turns, travel through a passage smaller than its diameter, and lift itself against gravity.
Passive Shape Locking for Multi-Bend Growing Inflated Beam Robots
Mar 04, 2023
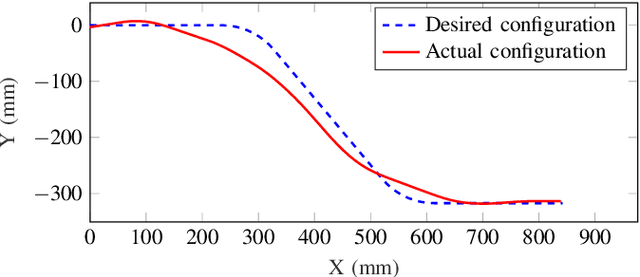
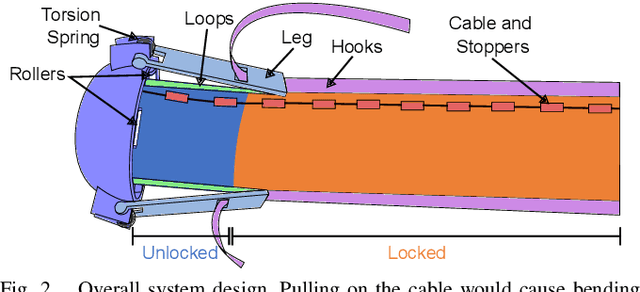
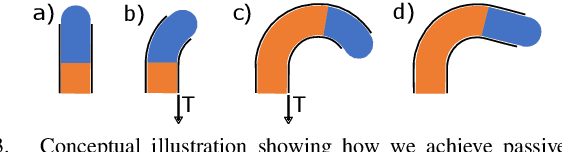
Shape change enables new capabilities for robots. One class of robots capable of dramatic shape change is soft growing "vine" robots. These robots usually feature global actuation methods for bending that limit them to simple, constant-curvature shapes. Achieving more complex "multi-bend" configurations has also been explored but requires choosing the desired configuration ahead of time, exploiting contact with the environment to maintain previous bends, or using pneumatic actuation for shape locking. In this paper, we present a novel design that enables passive, on-demand shape locking. Our design leverages a passive tip mount to apply hook-and-loop fasteners that hold bends without any pneumatic or electrical input. We characterize the robot's kinematics and ability to hold locked bends. We also experimentally evaluate the effect of hook-and-loop fasteners on beam and joint stiffness. Finally, we demonstrate our proof-of-concept prototype in 2D. Our passive shape locking design is a step towards easily reconfigurable robots that are lightweight, low-cost, and low-power.
Development and Evaluation of a Learning-based Model for Real-time Haptic Texture Rendering
Dec 27, 2022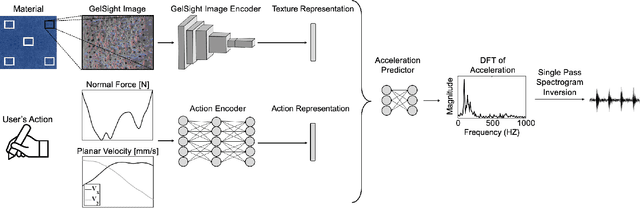
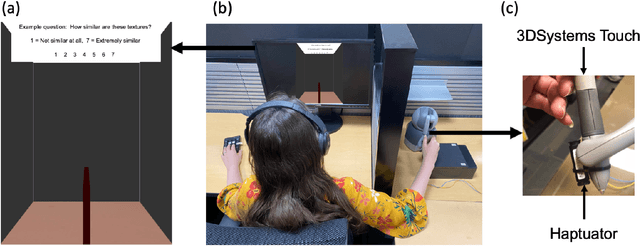
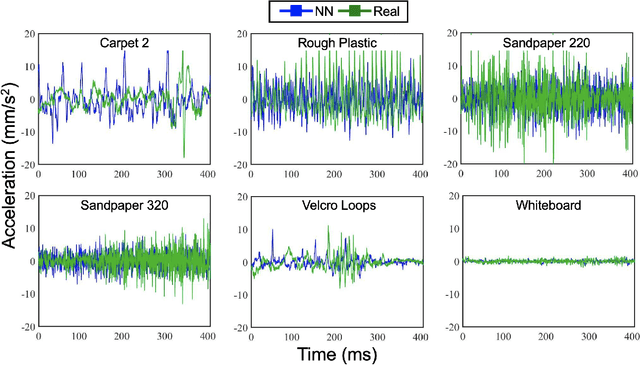
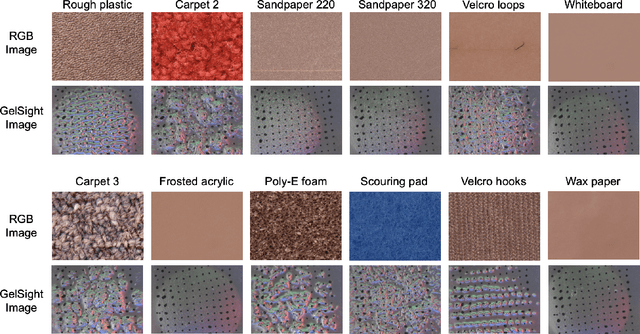
Current Virtual Reality (VR) environments lack the rich haptic signals that humans experience during real-life interactions, such as the sensation of texture during lateral movement on a surface. Adding realistic haptic textures to VR environments requires a model that generalizes to variations of a user's interaction and to the wide variety of existing textures in the world. Current methodologies for haptic texture rendering exist, but they usually develop one model per texture, resulting in low scalability. We present a deep learning-based action-conditional model for haptic texture rendering and evaluate its perceptual performance in rendering realistic texture vibrations through a multi part human user study. This model is unified over all materials and uses data from a vision-based tactile sensor (GelSight) to render the appropriate surface conditioned on the user's action in real time. For rendering texture, we use a high-bandwidth vibrotactile transducer attached to a 3D Systems Touch device. The result of our user study shows that our learning-based method creates high-frequency texture renderings with comparable or better quality than state-of-the-art methods without the need for learning a separate model per texture. Furthermore, we show that the method is capable of rendering previously unseen textures using a single GelSight image of their surface.
A Multi-Segment, Soft Growing Robot with Selective Steering
Dec 07, 2022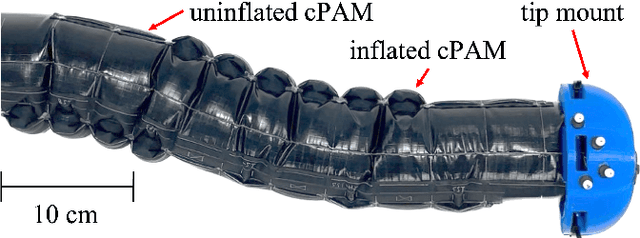
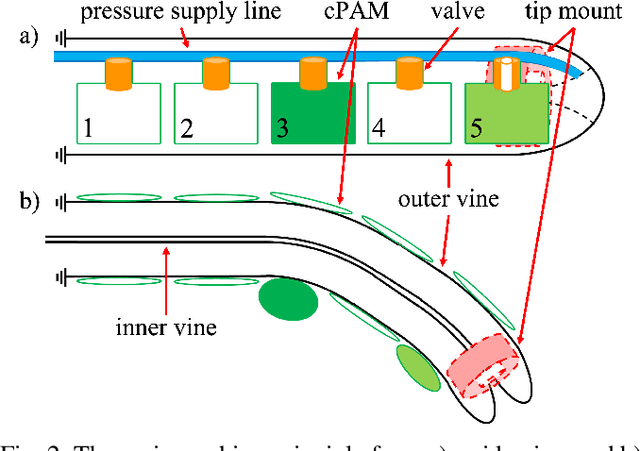
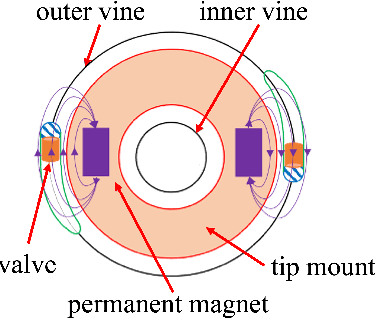
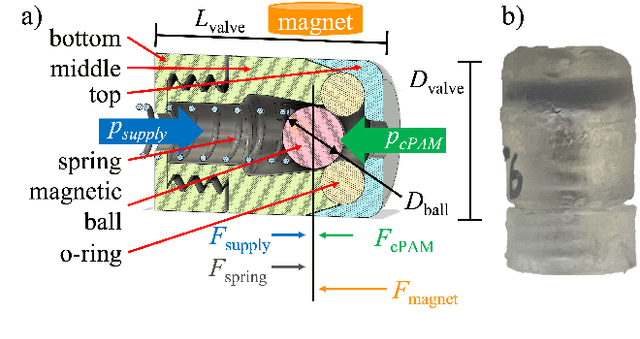
Everting, soft growing vine robots benefit from reduced friction with their environment, which allows them to navigate challenging terrain. Vine robots can use air pouches attached to their sides for lateral steering. However, when all pouches are serially connected, the whole robot can only perform one constant curvature in free space. It must contact the environment to navigate through obstacles along paths with multiple turns. This work presents a multi-segment vine robot that can navigate complex paths without interacting with its environment. This is achieved by a new steering method that selectively actuates each single pouch at the tip, providing high degrees of freedom with few control inputs. A small magnetic valve connects each pouch to a pressure supply line. A motorized tip mount uses an interlocking mechanism and motorized rollers on the outer material of the vine robot. As each valve passes through the tip mount, a permanent magnet inside the tip mount opens the valve so the corresponding pouch is connected to the pressure supply line at the same moment. Novel cylindrical pneumatic artificial muscles (cPAMs) are integrated into the vine robot and inflate to a cylindrical shape for improved bending characteristics compared to other state-of-the art vine robots. The motorized tip mount controls a continuous eversion speed and enables controlled retraction. A final prototype was able to repeatably grow into different shapes and hold these shapes. We predict the path using a model that assumes a piecewise constant curvature along the outside of the multi-segment vine robot. The proposed multi-segment steering method can be extended to other soft continuum robot designs.
A Modular 3-Degree-of-Freedom Force Sensor for Robot-assisted Minimally Invasive Surgery Research
Nov 10, 2022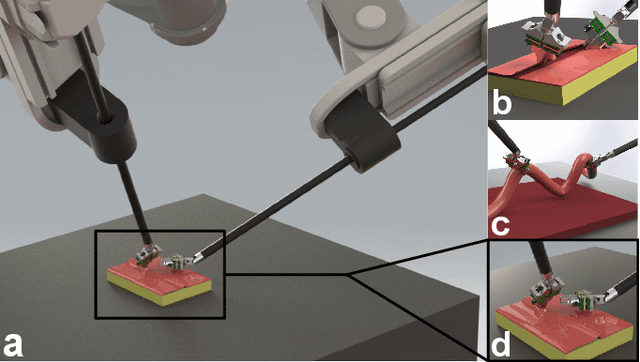
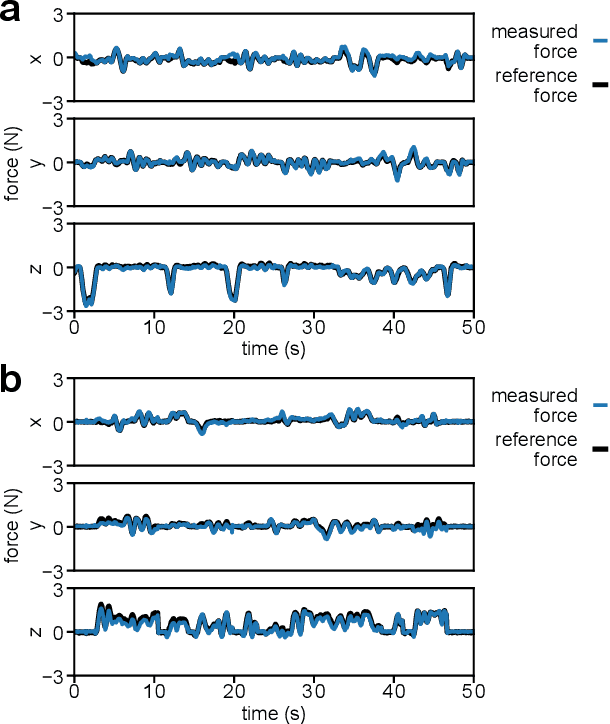
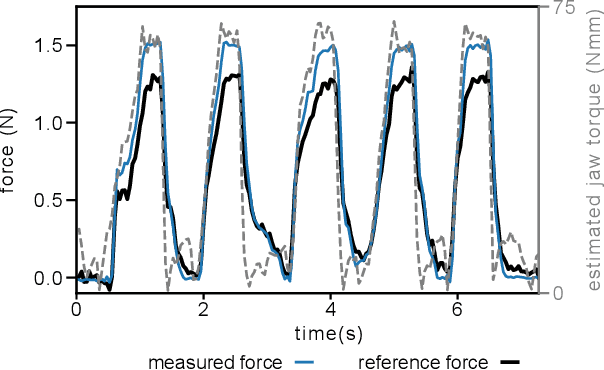
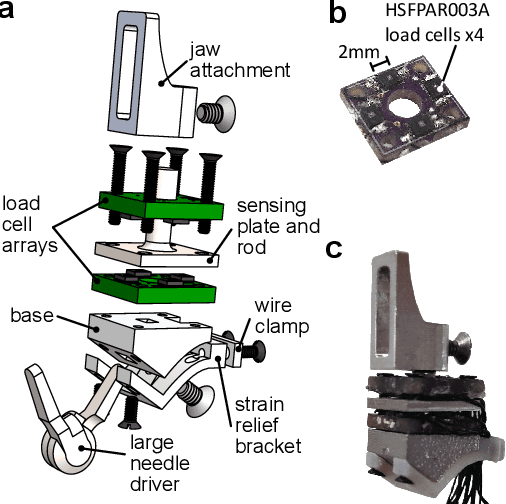
Effective force modulation during tissue manipulation is important for ensuring safe robot-assisted minimally invasive surgery (RMIS). Strict requirements for in-vivo distal force sensing have led to prior sensor designs that trade off ease of manufacture and integration against force measurement accuracy along the tool axis. These limitations have made collecting high-quality 3-degree-of-freedom (3-DoF) bimanual force data in RMIS inaccessible to researchers. We present a modular and manufacturable 3-DoF force sensor that integrates easily with an existing RMIS tool. We achieve this by relaxing biocompatibility and sterilizability requirements while utilizing commercial load cells and common electromechanical fabrication techniques. The sensor has a range of +-5 N axially and +-3 N laterally with average root mean square errors(RMSEs) of below 0.15 N in all directions. During teleoperated mock tissue manipulation tasks, a pair of jaw-mounted sensors achieved average RMSEs of below 0.15 N in all directions. For grip force, it achieved an RMSE of 0.156 N. The sensor has sufficient accuracy within the range of forces found in delicate manipulation tasks, with potential use in bimanual haptic feedback and robotic force control. As an open-source design, the sensors can be adapted to suit additional robotic applications outside of RMIS.