 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnkur Mehta
Population-aware Online Mirror Descent for Mean-Field Games by Deep Reinforcement Learning
Mar 06, 2024
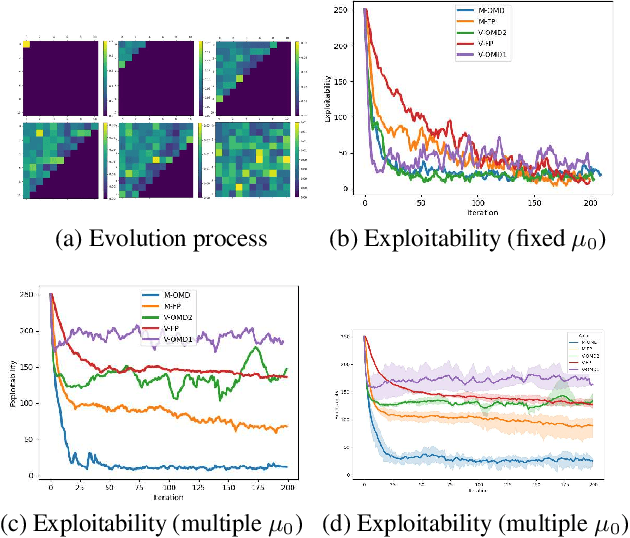
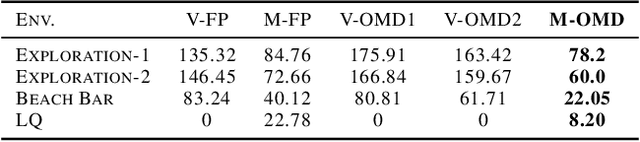
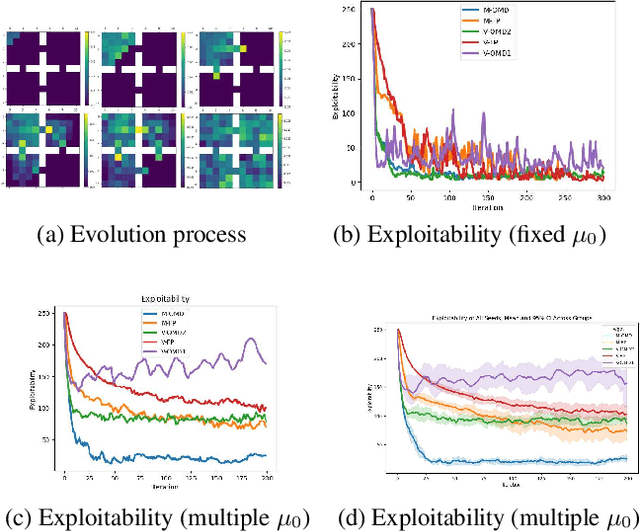
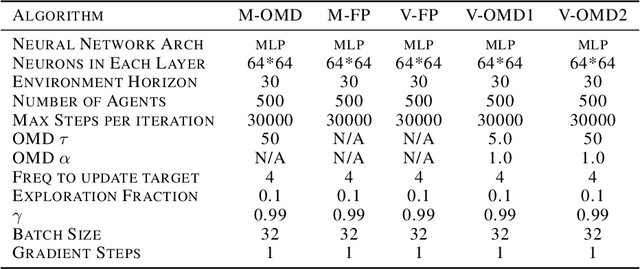
Mean Field Games (MFGs) have the ability to handle large-scale multi-agent systems, but learning Nash equilibria in MFGs remains a challenging task. In this paper, we propose a deep reinforcement learning (DRL) algorithm that achieves population-dependent Nash equilibrium without the need for averaging or sampling from history, inspired by Munchausen RL and Online Mirror Descent. Through the design of an additional inner-loop replay buffer, the agents can effectively learn to achieve Nash equilibrium from any distribution, mitigating catastrophic forgetting. The resulting policy can be applied to various initial distributions. Numerical experiments on four canonical examples demonstrate our algorithm has better convergence properties than SOTA algorithms, in particular a DRL version of Fictitious Play for population-dependent policies.
Cost-Driven Hardware-Software Co-Optimization of Machine Learning Pipelines
Oct 19, 2023Researchers have long touted a vision of the future enabled by a proliferation of internet-of-things devices, including smart sensors, homes, and cities. Increasingly, embedding intelligence in such devices involves the use of deep neural networks. However, their storage and processing requirements make them prohibitive for cheap, off-the-shelf platforms. Overcoming those requirements is necessary for enabling widely-applicable smart devices. While many ways of making models smaller and more efficient have been developed, there is a lack of understanding of which ones are best suited for particular scenarios. More importantly for edge platforms, those choices cannot be analyzed in isolation from cost and user experience. In this work, we holistically explore how quantization, model scaling, and multi-modality interact with system components such as memory, sensors, and processors. We perform this hardware/software co-design from the cost, latency, and user-experience perspective, and develop a set of guidelines for optimal system design and model deployment for the most cost-constrained platforms. We demonstrate our approach using an end-to-end, on-device, biometric user authentication system using a $20 ESP-EYE board.
REMS: Middleware for Robotics Education and Development
Oct 11, 2022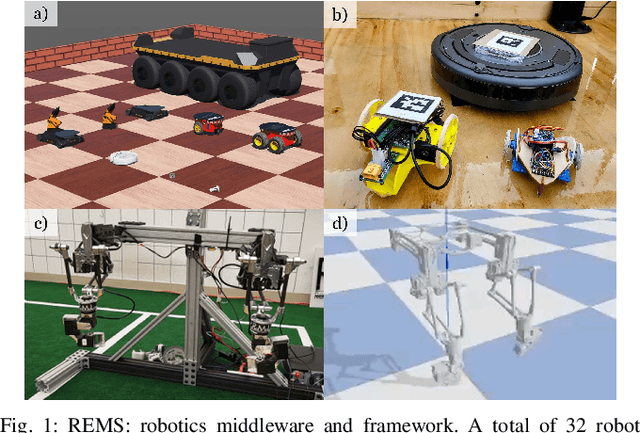

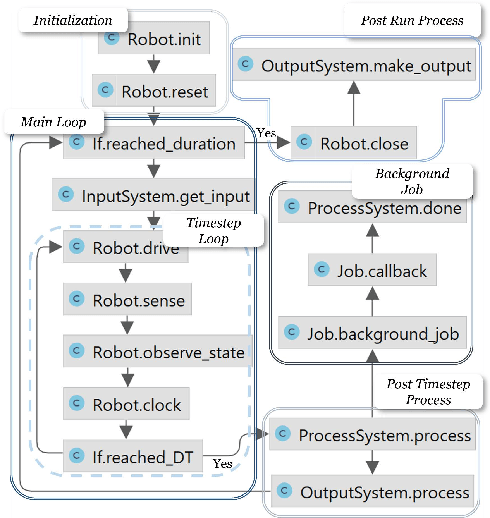
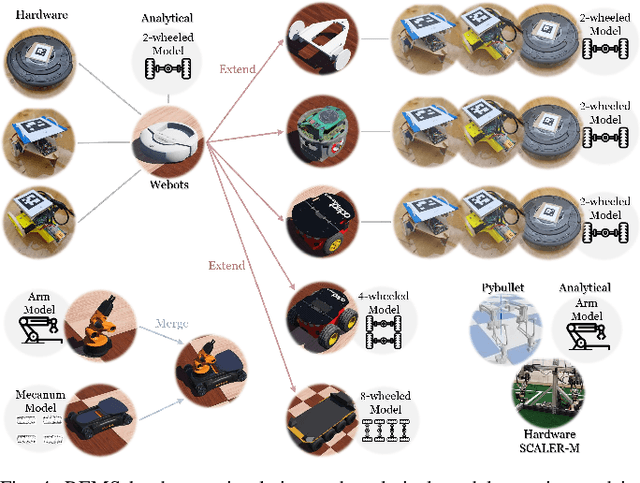
This paper introduces REMS, a robotics middleware and control framework that is designed to introduce the Zen of Python to robotics and to improve robotics education and development flow. Although existing middleware can serve hardware abstraction and modularity, setting up environments and learning middleware-specific syntax and procedures are less viable in education. They can curb opportunities to understand robotics concepts, theories, and algorithms. Robotics is a field of integration; students and developers from various backgrounds will be involved in programming. Establishing Pythonic and object-oriented robotic framework in a natural way can enhance modular and abstracted programming for better readability, reusability, and simplicity, but also supports useful and practical skills generally in coding. REMS is to be a valuable robot educational medium not just as a tool and to be a platform from one robot to multi-agent across hardware, simulation, and analytical model implementations.
An origami crawling robot driven by a folded self-sustained oscillator
Feb 07, 2022
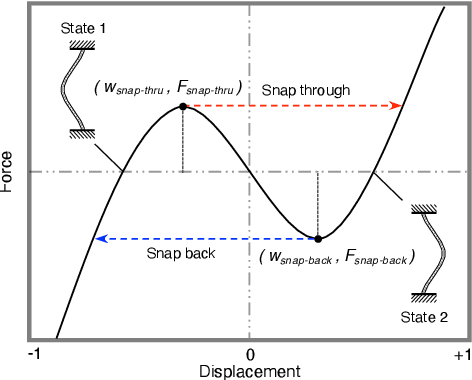
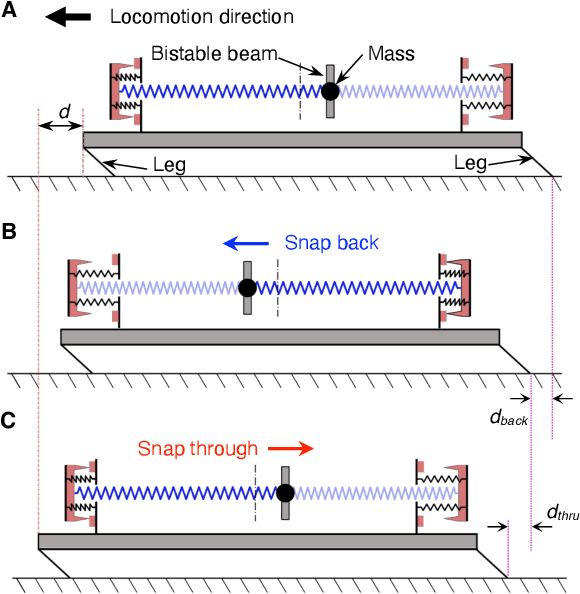
Locomotive robots that do not rely on electronics and/or electromagnetic components will open up new perspectives and applications for robotics. However, these robots usually involve complicated and tedious fabrication processes, limiting their applications. Here, we develop an easy-to-fabricate crawling robot by embedding simple control and actuation into origami-inspired mechanisms through folding, eliminating the need for discrete electronics and transducers. Our crawling robot locomotes through directional friction propelled by an onboard origami self-sustained oscillator, which generates periodic actuation from a single source of constant power. The crawling robot is lightweight (~ 3.8 gram), ultra low-cost (~ US $1), nonmagnetic, and electronic-free; it may enable practical applications in extreme environments, e.g., large radiation or magnetic fields. The robot can be fabricated through a monolithic origami-inspired folding-based method with universal materials, i.e., sheet materials and conductive threads. This rapid design and fabrication approach enables the programmable assembly of various mechanisms within this manufacturing paradigm, laying the foundation for autonomous, untethered robots without requiring electronics.
Joint State and Input Estimation of Agent Based on Recursive Kalman Filter Given Prior Knowledge
Nov 15, 2021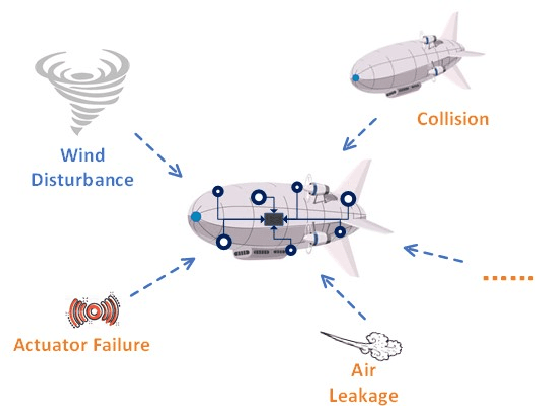
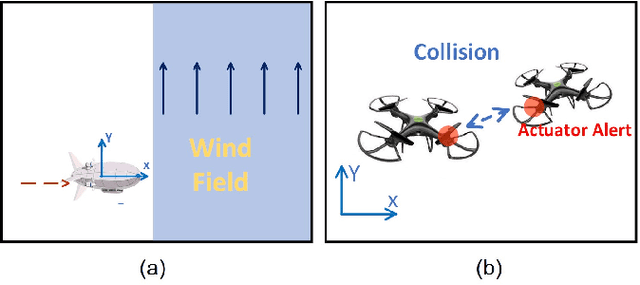
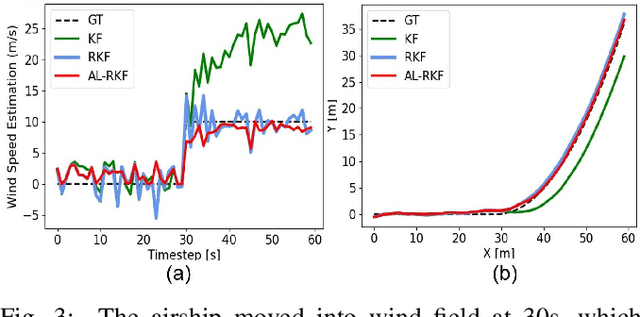
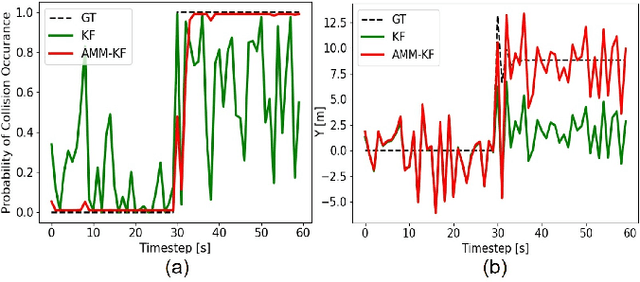
Modern autonomous systems are purposed for many challenging scenarios, where agents will face unexpected events and complicated tasks. The presence of disturbance noise with control command and unknown inputs can negatively impact robot performance. Previous research of joint input and state estimation separately study the continuous and discrete cases without any prior information. This paper combines the continuous space and discrete space estimation into a unified theory based on the Expectation-Maximum (EM) algorithm. By introducing prior knowledge of events as the constraint, inequality optimization problems are formulated to determine a gain matrix or dynamic weights to realize an optimal input estimation with lower variance and more accurate decision-making. Finally, statistical results from experiments show that our algorithm owns 81\% improvement of the variance than KF and 47\% improvement than RKF in continuous space; a remarkable improvement of right decision-making probability of our input estimator in discrete space, identification ability is also analyzed by experiments.
Direct LiDAR Odometry: Fast Localization with Dense Point Clouds
Oct 01, 2021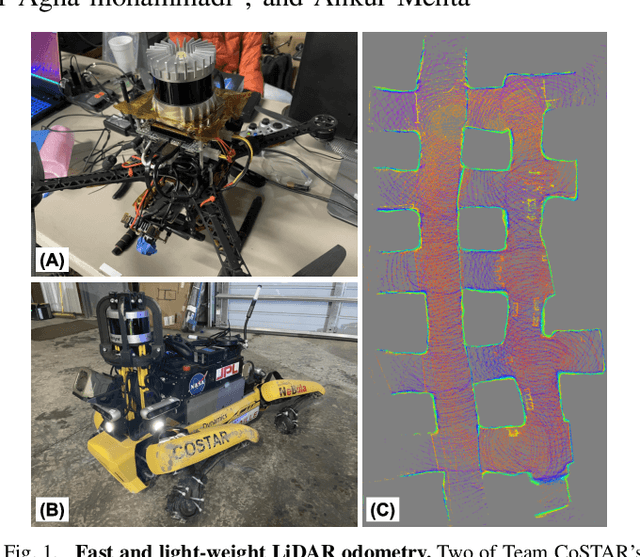
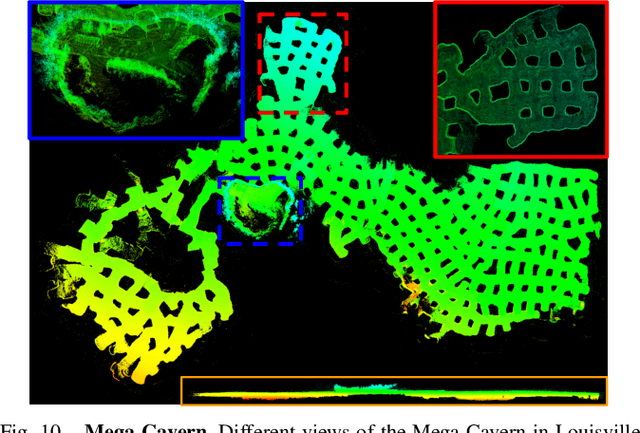
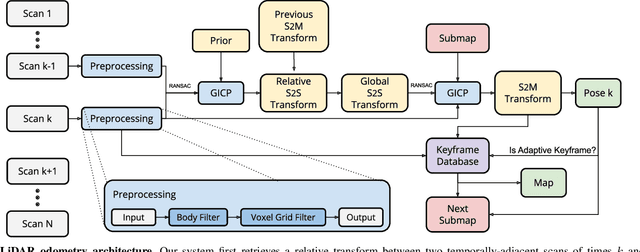
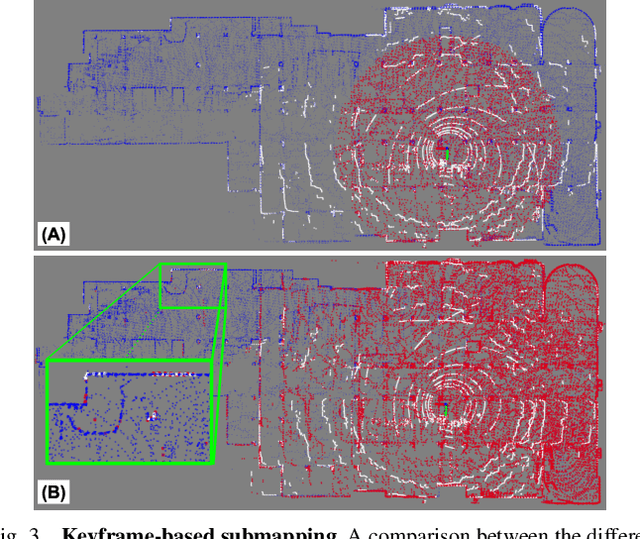
This paper presents a light-weight frontend LiDAR odometry solution with consistent and accurate localization for computationally-limited robotic platforms. Our Direct LiDAR Odometry (DLO) method includes several key algorithmic innovations which prioritize computational efficiency and enables the use of full, minimally-preprocessed point clouds to provide accurate pose estimates in real-time. This work also presents several important algorithmic insights and design choices from developing on platforms with shared or otherwise limited computational resources, including a custom iterative closest point solver for fast point cloud registration with data structure recycling. Our method is more accurate with lower computational overhead than the current state-of-the-art and has been extensively evaluated in several perceptually-challenging environments on aerial and legged robots as part of NASA JPL Team CoSTAR's research and development efforts for the DARPA Subterranean Challenge.
Resilient and consistent multirobot cooperative localization with covariance intersection
Aug 19, 2021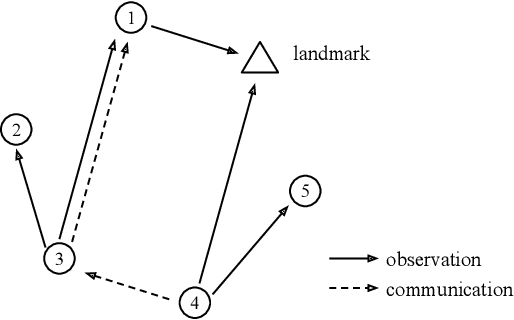
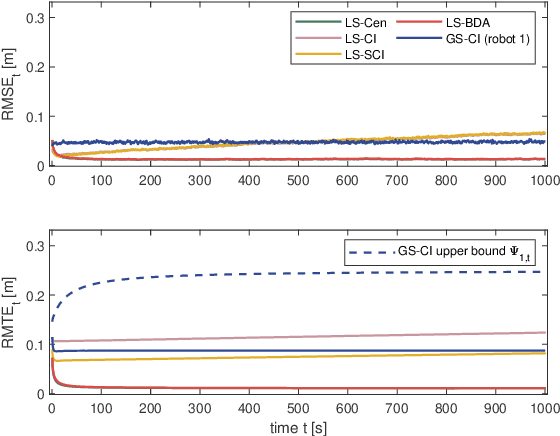
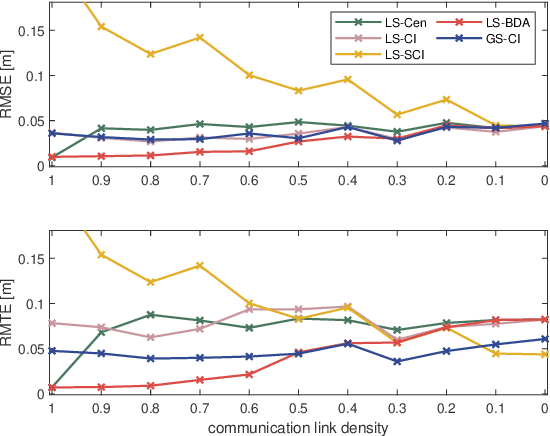
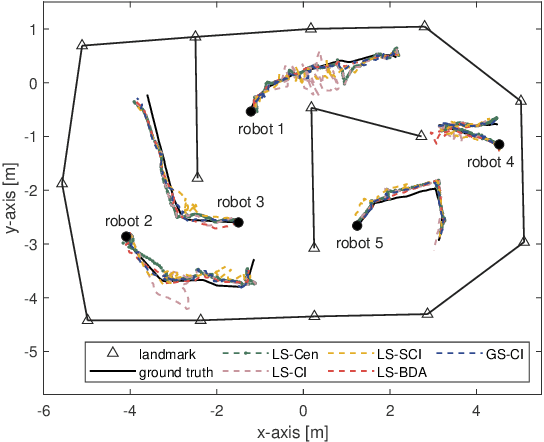
Cooperative localization is fundamental to autonomous multirobot systems, but most algorithms couple inter-robot communication with observation, making these algorithms susceptible to failures in both communication and observation steps. To enhance the resilience of multirobot cooperative localization algorithms in a distributed system, we use covariance intersection to formalize a localization algorithm with an explicit communication update and ensure estimation consistency at the same time. We investigate the covariance boundedness criterion of our algorithm with respect to communication and observation graphs, demonstrating provable localization performance under even sparse communications topologies. We substantiate the resilience of our algorithm as well as the boundedness analysis through experiments on simulated and benchmark physical data against varying communications connectivity and failure metrics. Especially when inter-robot communication is entirely blocked or partially unavailable, we demonstrate that our method is less affected and maintains desired performance compared to existing cooperative localization algorithms.
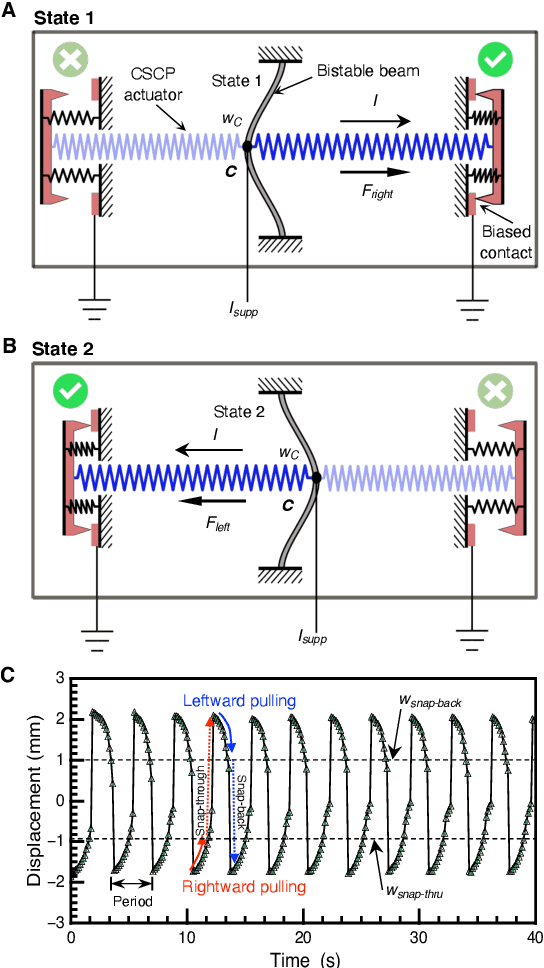
A cut-and-fold self-sustained compliant oscillator for autonomous actuation of origami-inspired robots
Aug 19, 2021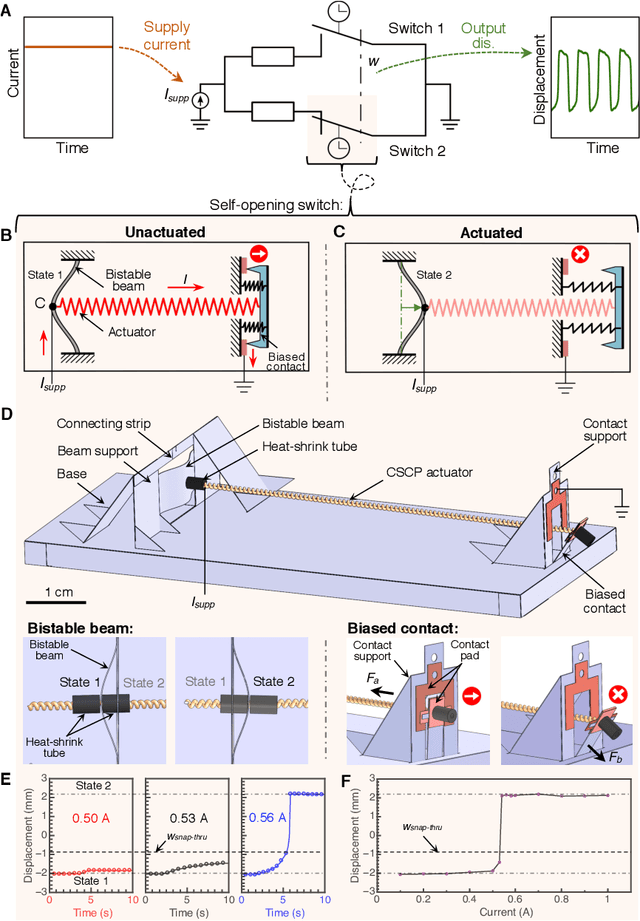
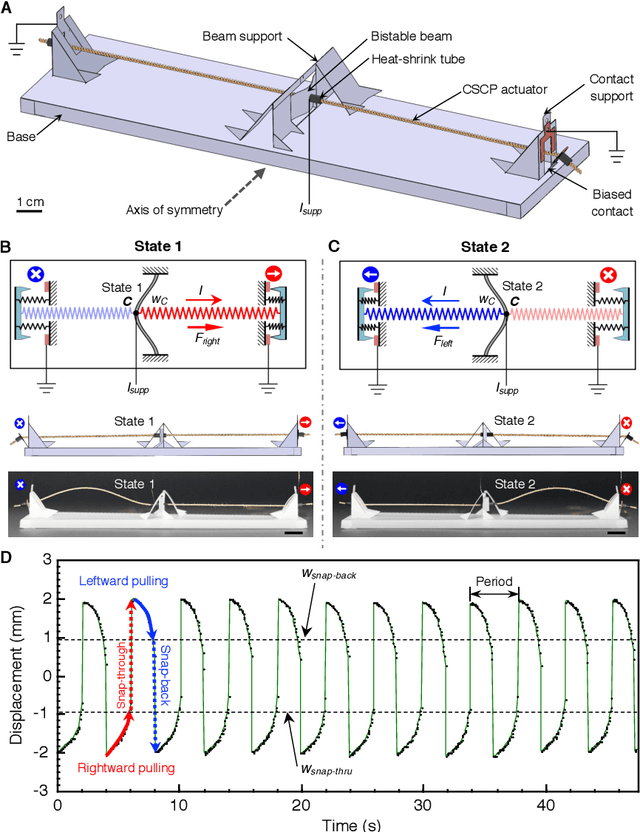
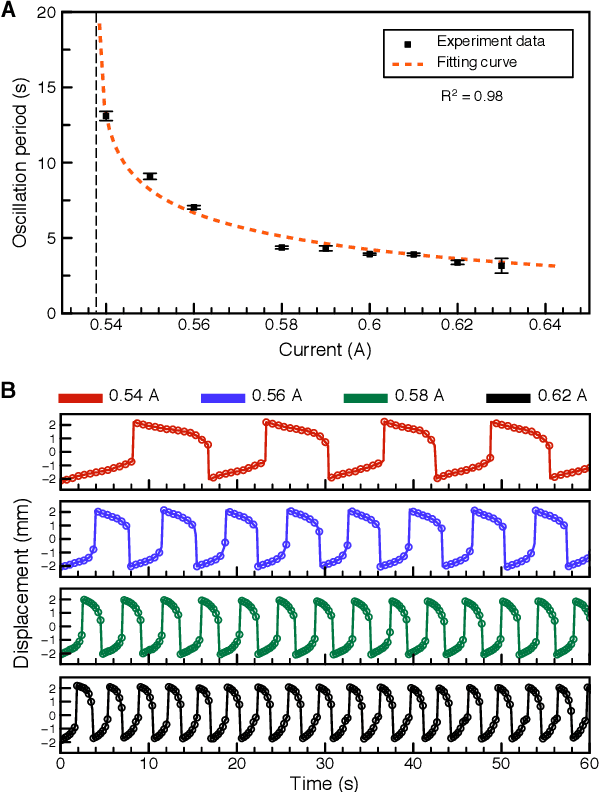
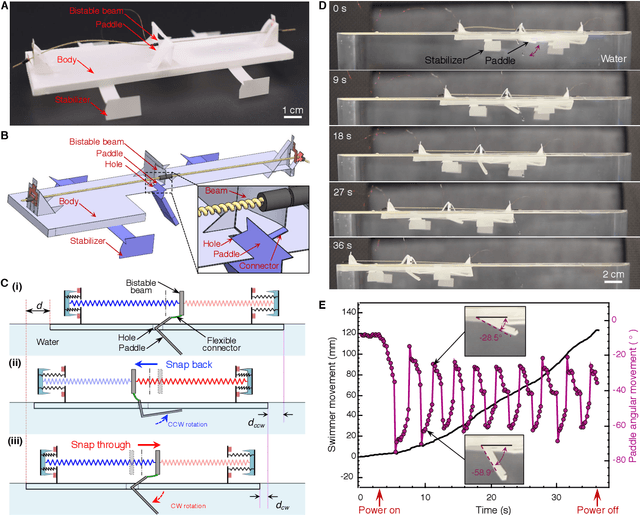
Origami-inspired robots are of particular interest given their potential for rapid and accessible design and fabrication of elegant designs and complex functionalities through cutting and folding of flexible 2D sheets or even strings, i.e.printable manufacturing. Yet, origami robots still require bulky, rigid components or electronics for actuation and control to accomplish tasks with reliability, programmability, ability to output substantial force, and durability, restricting their full potential. Here, we present a printable self-sustained compliant oscillator that generates periodic actuation using only constant electrical power, without discrete components or electronic control hardware. This oscillator is robust (9 out of 10 prototypes worked successfully on the first try), configurable (with tunable periods from 3 s to 12 s), powerful (can overcome hydrodynamic resistance to consistently propel a swimmer at ~1.6 body lengths/min), and long-lasting (~10^3 cycles); it enables driving macroscale devices with prescribed autonomous behaviors, e.g. locomotion and sequencing. This oscillator is also fully functional underwater and in high magnetic fields. Our analytical model characterizes essential parameters of the oscillation period, enabling programmable design of the oscillator. The printable oscillator can be integrated into origami-inspired systems seamlessly and monolithically, allowing rapid design and prototyping; the resulting integrated devices are lightweight, low-cost, compliant, electronic-free, and nonmagnetic, enabling practical applications in extreme areas. We demonstrate the functionalities of the oscillator with: (i) autonomous gliding of a printable swimmer, (ii) LED flashing, and (iii) fluid stirring. This work paves the way for realizing fully printable autonomous robots with a high integration of actuation and control.
Fabrication-aware Design for Furniture with Planar Pieces
Apr 11, 2021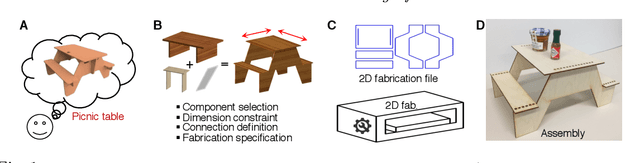
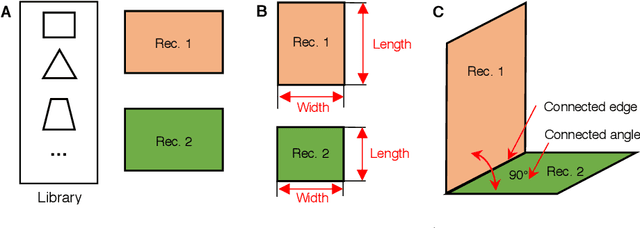
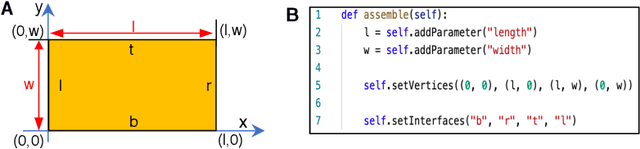
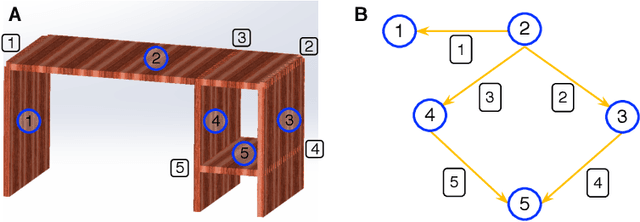
We propose a computational design tool to enable casual end-users to easily design, fabricate, and assemble flat-pack furniture with guaranteed manufacturability. Using our system, users select parameterized components from a library and constrain their dimensions. Then they abstractly specify connections among components to define the furniture. Once fabrication specifications (e.g. materials) designated, the mechanical implementation of the furniture is automatically handled by leveraging encoded domain expertise. Afterwards, the system outputs 3D models for visualization and mechanical drawings for fabrication. We demonstrate the validity of our approach by designing, fabricating, and assembling a variety of flat-pack (scaled) furniture on demand.
LTO: Lazy Trajectory Optimization with Graph-Search Planning for High DOF Robots in Cluttered Environments
Mar 23, 2021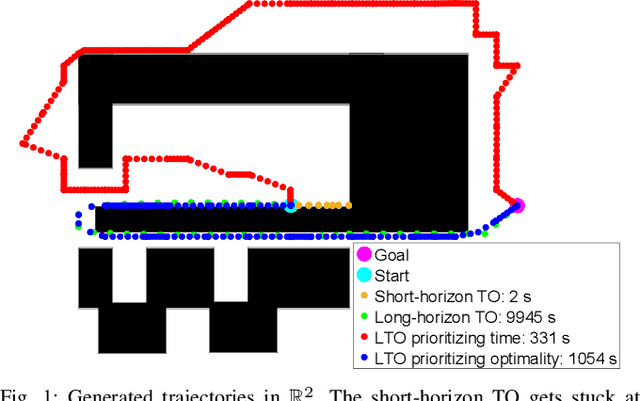

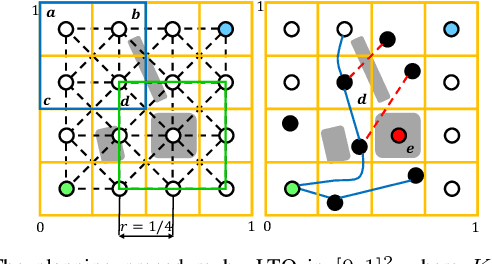
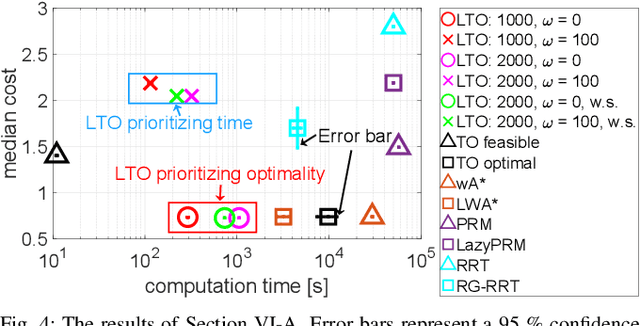
Although Trajectory Optimization (TO) is one of the most powerful motion planning tools, it suffers from expensive computational complexity as a time horizon increases in cluttered environments. It can also fail to converge to a globally optimal solution. In this paper, we present Lazy Trajectory Optimization (LTO) that unifies local short-horizon TO and global Graph-Search Planning (GSP) to generate a long-horizon global optimal trajectory. LTO solves TO with the same constraints as the original long-horizon TO with improved time complexity. We also propose a TO-aware cost function that can balance both solution cost and planning time. Since LTO solves many nearly identical TO in a roadmap, it can provide an informed warm-start for TO to accelerate the planning process. We also present proofs of the computational complexity and optimality of LTO. Finally, we demonstrate LTO's performance on motion planning problems for a 2 DOF free-flying robot and a 21 DOF legged robot, showing that LTO outperforms existing algorithms in terms of its runtime and reliability.