 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBabak Esfandiari
Toward Campus Mail Delivery Using BDI
Jul 23, 2020
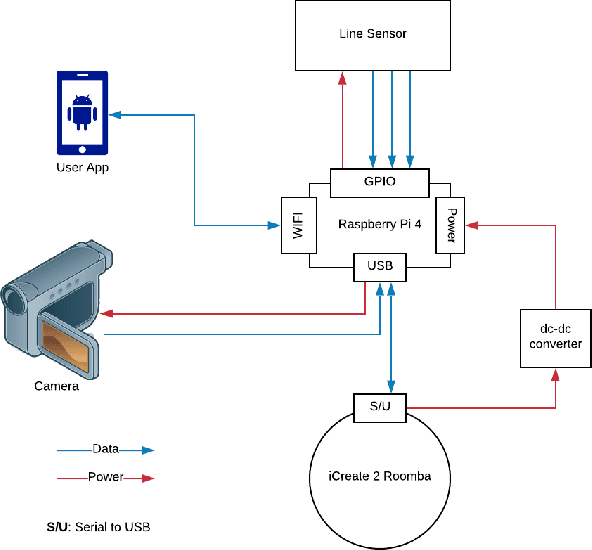
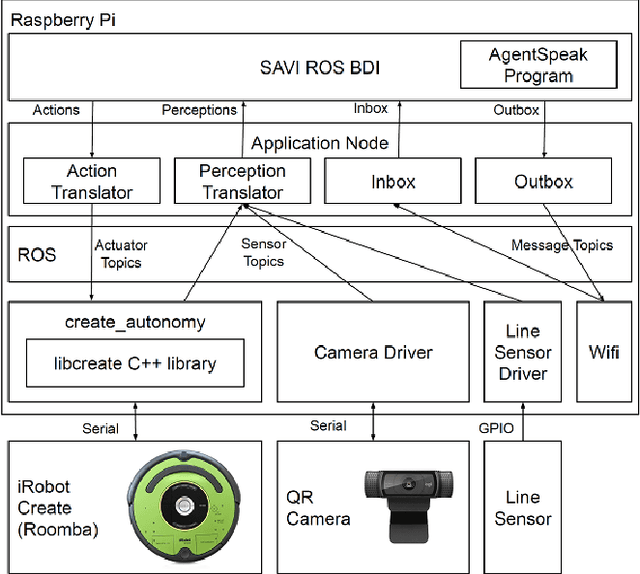
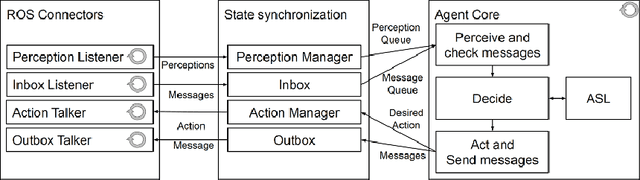
Autonomous systems developed with the Belief-Desire-Intention (BDI) architecture are usually mostly implemented in simulated environments. In this project we sought to build a BDI agent for use in the real world for campus mail delivery in the tunnel system at Carleton University. Ideally, the robot should receive a delivery order via a mobile application, pick up the mail at a station, navigate the tunnels to the destination station, and notify the recipient. We linked the Robot Operating System (ROS) with a BDI reasoning system to achieve a subset of the required use cases. ROS handles the low-level sensing and actuation, while the BDI reasoning system handles the high-level reasoning and decision making. Sensory data is orchestrated and sent from ROS to the reasoning system as perceptions. These perceptions are then deliberated upon, and an action string is sent back to ROS for interpretation and driving of the necessary actuator for the action to be performed. In this paper we present our current implementation, which closes the loop on the hardware-software integration, and implements a subset of the use cases required for the full system.
* In Proceedings AREA 2020, arXiv:2007.11260
Behavior Cloning in OpenAI using Case Based Reasoning
Feb 23, 2020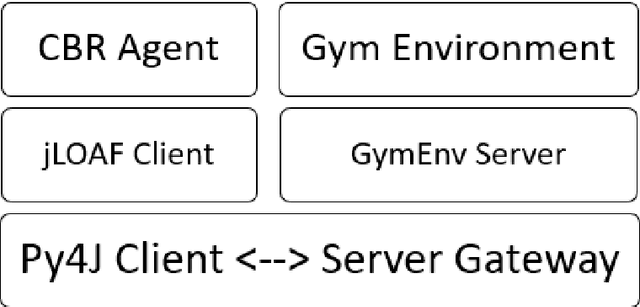
Learning from Observation (LfO), also known as Behavioral Cloning, is an approach for building software agents by recording the behavior of an expert (human or artificial) and using the recorded data to generate the required behavior. jLOAF is a platform that uses Case-Based Reasoning to achieve LfO. In this paper we interface jLOAF with the popular OpenAI Gym environment. Our experimental results show how our approach can be used to provide a baseline for comparison in this domain, as well as identify the strengths and weaknesses when dealing with environmental complexity.