 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBen Eisner
Deep SE(3)-Equivariant Geometric Reasoning for Precise Placement Tasks
Apr 20, 2024
Many robot manipulation tasks can be framed as geometric reasoning tasks, where an agent must be able to precisely manipulate an object into a position that satisfies the task from a set of initial conditions. Often, task success is defined based on the relationship between two objects - for instance, hanging a mug on a rack. In such cases, the solution should be equivariant to the initial position of the objects as well as the agent, and invariant to the pose of the camera. This poses a challenge for learning systems which attempt to solve this task by learning directly from high-dimensional demonstrations: the agent must learn to be both equivariant as well as precise, which can be challenging without any inductive biases about the problem. In this work, we propose a method for precise relative pose prediction which is provably SE(3)-equivariant, can be learned from only a few demonstrations, and can generalize across variations in a class of objects. We accomplish this by factoring the problem into learning an SE(3) invariant task-specific representation of the scene and then interpreting this representation with novel geometric reasoning layers which are provably SE(3) equivariant. We demonstrate that our method can yield substantially more precise placement predictions in simulated placement tasks than previous methods trained with the same amount of data, and can accurately represent relative placement relationships data collected from real-world demonstrations. Supplementary information and videos can be found at https://sites.google.com/view/reldist-iclr-2023.
On Time-Indexing as Inductive Bias in Deep RL for Sequential Manipulation Tasks
Jan 03, 2024While solving complex manipulation tasks, manipulation policies often need to learn a set of diverse skills to accomplish these tasks. The set of skills is often quite multimodal - each one may have a quite distinct distribution of actions and states. Standard deep policy-learning algorithms often model policies as deep neural networks with a single output head (deterministic or stochastic). This structure requires the network to learn to switch between modes internally, which can lead to lower sample efficiency and poor performance. In this paper we explore a simple structure which is conducive to skill learning required for so many of the manipulation tasks. Specifically, we propose a policy architecture that sequentially executes different action heads for fixed durations, enabling the learning of primitive skills such as reaching and grasping. Our empirical evaluation on the Metaworld tasks reveals that this simple structure outperforms standard policy learning methods, highlighting its potential for improved skill acquisition.
FlowBot++: Learning Generalized Articulated Objects Manipulation via Articulation Projection
Jun 22, 2023Understanding and manipulating articulated objects, such as doors and drawers, is crucial for robots operating in human environments. We wish to develop a system that can learn to articulate novel objects with no prior interaction, after training on other articulated objects. Previous approaches for articulated object manipulation rely on either modular methods which are brittle or end-to-end methods, which lack generalizability. This paper presents FlowBot++, a deep 3D vision-based robotic system that predicts dense per-point motion and dense articulation parameters of articulated objects to assist in downstream manipulation tasks. FlowBot++ introduces a novel per-point representation of the articulated motion and articulation parameters that are combined to produce a more accurate estimate than either method on their own. Simulated experiments on the PartNet-Mobility dataset validate the performance of our system in articulating a wide range of objects, while real-world experiments on real objects' point clouds and a Sawyer robot demonstrate the generalizability and feasibility of our system in real-world scenarios.
TAX-Pose: Task-Specific Cross-Pose Estimation for Robot Manipulation
Nov 17, 2022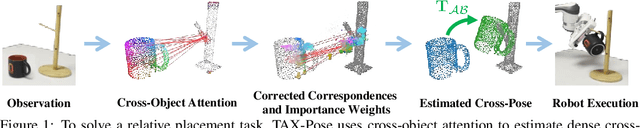

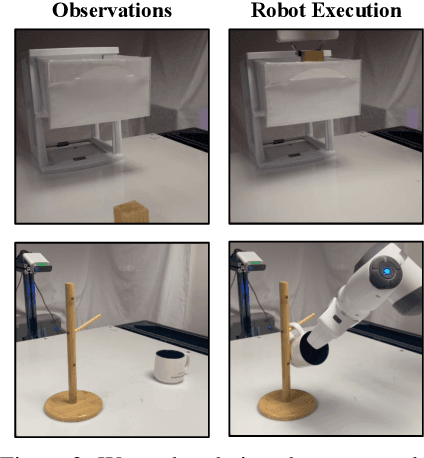
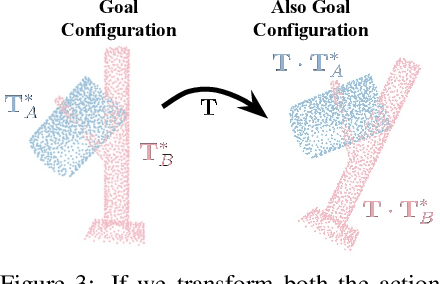
How do we imbue robots with the ability to efficiently manipulate unseen objects and transfer relevant skills based on demonstrations? End-to-end learning methods often fail to generalize to novel objects or unseen configurations. Instead, we focus on the task-specific pose relationship between relevant parts of interacting objects. We conjecture that this relationship is a generalizable notion of a manipulation task that can transfer to new objects in the same category; examples include the relationship between the pose of a pan relative to an oven or the pose of a mug relative to a mug rack. We call this task-specific pose relationship ``cross-pose" and provide a mathematical definition of this concept. We propose a vision-based system that learns to estimate the cross-pose between two objects for a given manipulation task using learned cross-object correspondences. The estimated cross-pose is then used to guide a downstream motion planner to manipulate the objects into the desired pose relationship (placing a pan into the oven or the mug onto the mug rack). We demonstrate our method's capability to generalize to unseen objects, in some cases after training on only 10 demonstrations in the real world. Results show that our system achieves state-of-the-art performance in both simulated and real-world experiments across a number of tasks. Supplementary information and videos can be found at https://sites.google.com/view/tax-pose/home.
FlowBot3D: Learning 3D Articulation Flow to Manipulate Articulated Objects
May 09, 2022

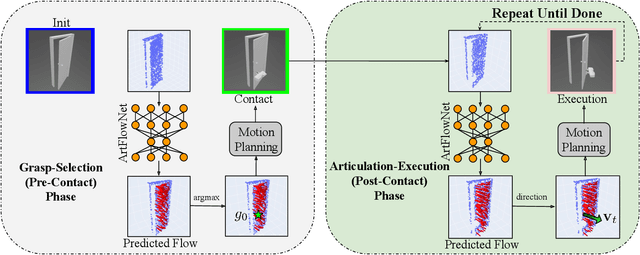

We explore a novel method to perceive and manipulate 3D articulated objects that generalizes to enable a robot to articulate unseen classes of objects. We propose a vision-based system that learns to predict the potential motions of the parts of a variety of articulated objects to guide downstream motion planning of the system to articulate the objects. To predict the object motions, we train a neural network to output a dense vector field representing the point-wise motion direction of the points in the point cloud under articulation. We then deploy an analytical motion planner based on this vector field to achieve a policy that yields maximum articulation. We train the vision system entirely in simulation, and we demonstrate the capability of our system to generalize to unseen object instances and novel categories in both simulation and the real world, deploying our policy on a Sawyer robot with no finetuning. Results show that our system achieves state-of-the-art performance in both simulated and real-world experiments.
Self-supervised Transparent Liquid Segmentation for Robotic Pouring
Mar 03, 2022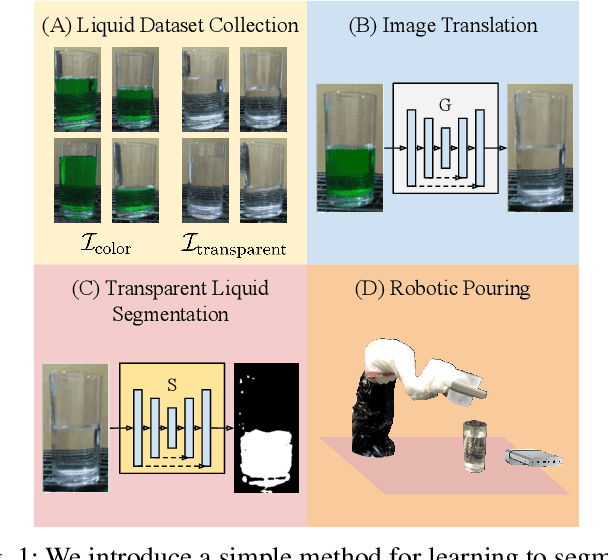

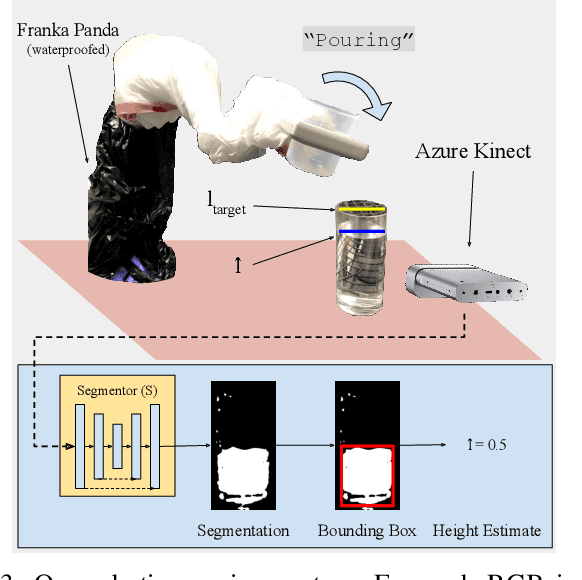
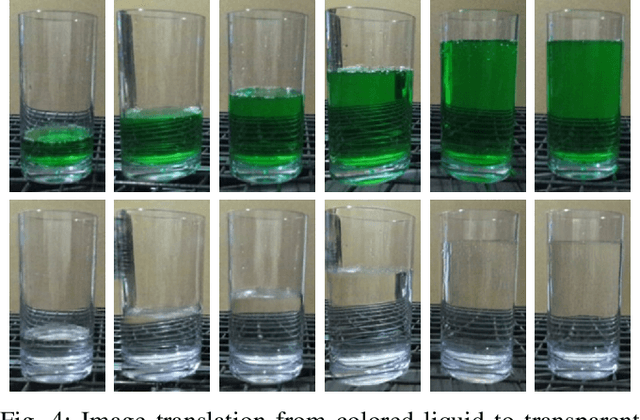
Liquid state estimation is important for robotics tasks such as pouring; however, estimating the state of transparent liquids is a challenging problem. We propose a novel segmentation pipeline that can segment transparent liquids such as water from a static, RGB image without requiring any manual annotations or heating of the liquid for training. Instead, we use a generative model that is capable of translating images of colored liquids into synthetically generated transparent liquid images, trained only on an unpaired dataset of colored and transparent liquid images. Segmentation labels of colored liquids are obtained automatically using background subtraction. Our experiments show that we are able to accurately predict a segmentation mask for transparent liquids without requiring any manual annotations. We demonstrate the utility of transparent liquid segmentation in a robotic pouring task that controls pouring by perceiving the liquid height in a transparent cup. Accompanying video and supplementary materials can be found
* Accepted at ICRA 2022
Robotic Grasping through Combined image-Based Grasp Proposal and 3D Reconstruction
Mar 03, 2020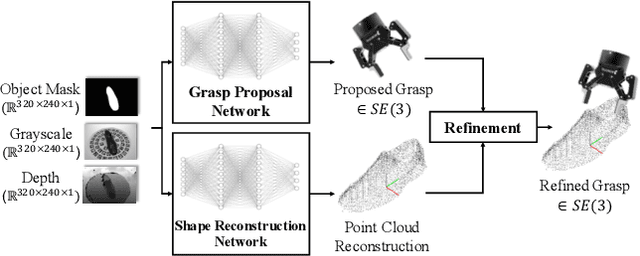
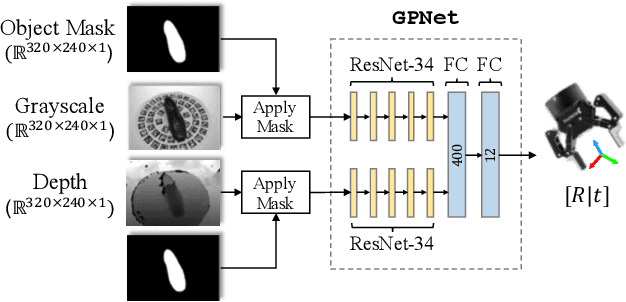
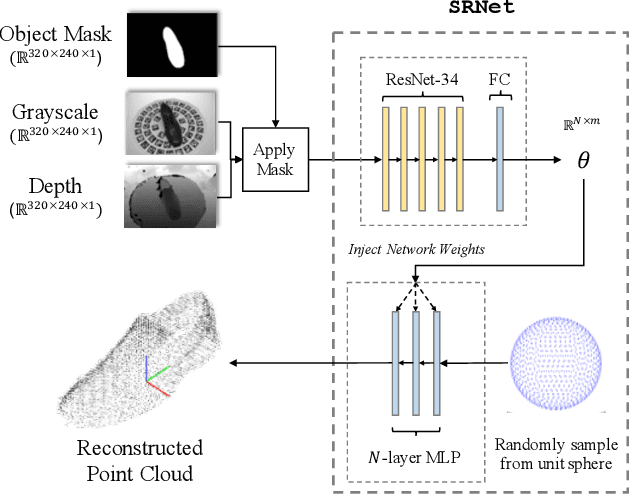
We present a novel approach to robotic grasp planning using both a learned grasp proposal network and a learned 3D shape reconstruction network. Our system generates 6-DOF grasps from a single RGB-D image of the target object, which is provided as input to both networks. By using the geometric reconstruction to refine the the candidate grasp produced by the grasp proposal network, our system is able to accurately grasp both known and unknown objects, even when the grasp location on the object is not visible in the input image. This paper presents the network architectures, training procedures, and grasp refinement method that comprise our system. Hardware experiments demonstrate the efficacy of our system at grasping both known and unknown objects (91% success rate). We additionally perform ablation studies that show the benefits of combining a learned grasp proposal with geometric reconstruction for grasping, and also show that our system outperforms several baselines in a grasping task.
QXplore: Q-learning Exploration by Maximizing Temporal Difference Error
Jun 19, 2019


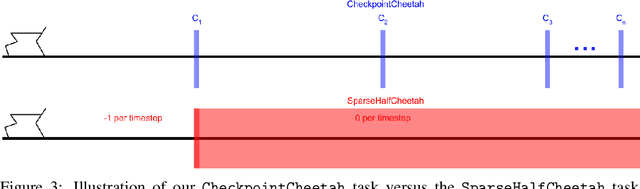
A major challenge in reinforcement learning for continuous state-action spaces is exploration, especially when reward landscapes are very sparse. Several recent methods provide an intrinsic motivation to explore by directly encouraging RL agents to seek novel states. A potential disadvantage of pure state novelty-seeking behavior is that unknown states are treated equally regardless of their potential for future reward. In this paper, we propose that the temporal difference error of predicting primary reward can serve as a secondary reward signal for exploration. This leads to novelty-seeking in the absence of primary reward, and at the same time accelerates exploration of reward-rich regions in sparse (but nonzero) reward landscapes compared to state novelty-seeking. This objective draws inspiration from dopaminergic pathways in the brain that influence animal behavior. We implement this idea with an adversarial method in which Q and Qx are the action-value functions for primary and secondary rewards, respectively. Secondary reward is given by the absolute value of the TD-error of Q. Training is off-policy, based on a replay buffer containing a mixture of trajectories induced by Q and Qx. We characterize performance on a suite of continuous control benchmark tasks against recent state of the art exploration methods and demonstrate comparable or better performance on all tasks, with much faster convergence for Q.
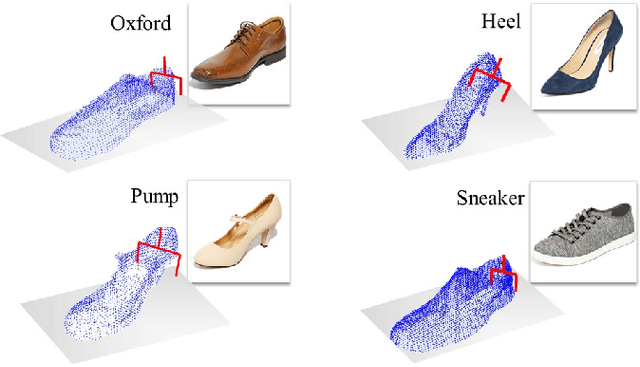
Pixels to Plans: Learning Non-Prehensile Manipulation by Imitating a Planner
Apr 05, 2019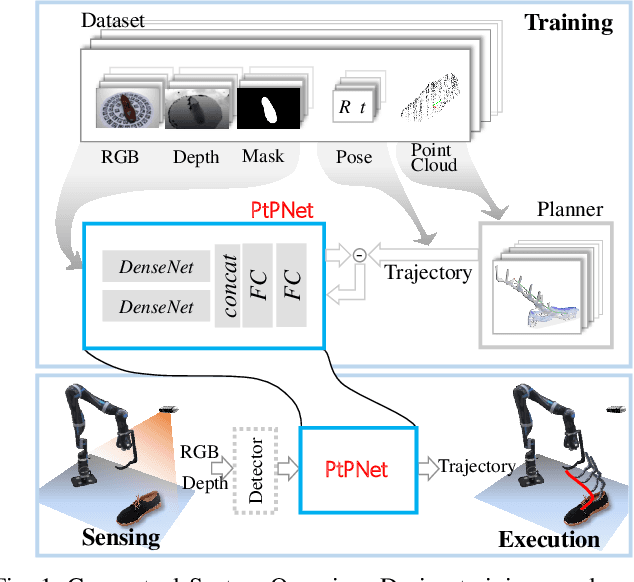
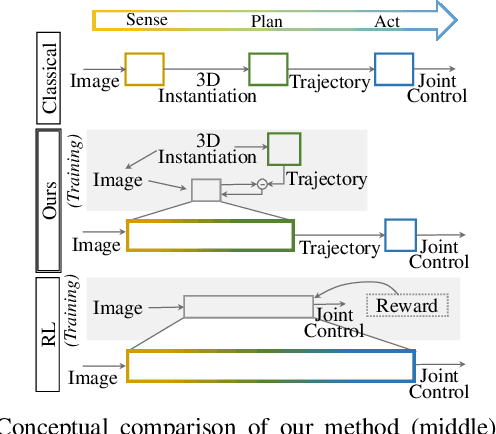
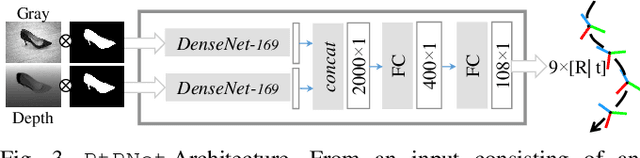
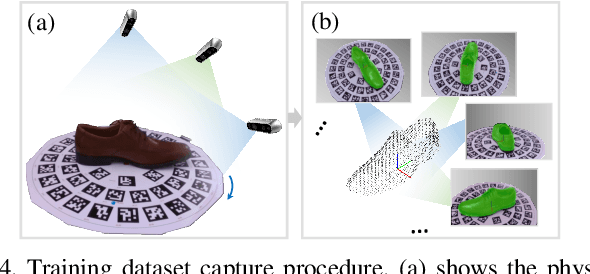
We present a novel method enabling robots to quickly learn to manipulate objects by leveraging a motion planner to generate "expert" training trajectories from a small amount of human-labeled data. In contrast to the traditional sense-plan-act cycle, we propose a deep learning architecture and training regimen called PtPNet that can estimate effective end-effector trajectories for manipulation directly from a single RGB-D image of an object. Additionally, we present a data collection and augmentation pipeline that enables the automatic generation of large numbers (millions) of training image and trajectory examples with almost no human labeling effort. We demonstrate our approach in a non-prehensile tool-based manipulation task, specifically picking up shoes with a hook. In hardware experiments, PtPNet generates motion plans (open-loop trajectories) that reliably (89% success over 189 trials) pick up four very different shoes from a range of positions and orientations, and reliably picks up a shoe it has never seen before. Compared with a traditional sense-plan-act paradigm, our system has the advantages of operating on sparse information (single RGB-D frame), producing high-quality trajectories much faster than the "expert" planner (300ms versus several seconds), and generalizing effectively to previously unseen shoes.
Q-Learning for Continuous Actions with Cross-Entropy Guided Policies
Mar 28, 2019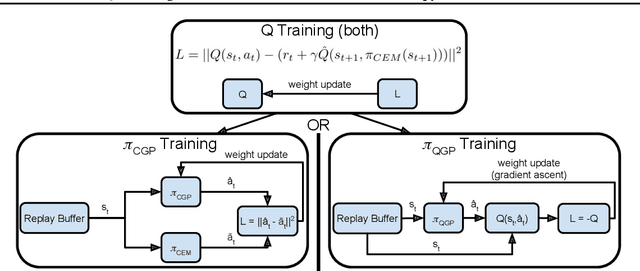
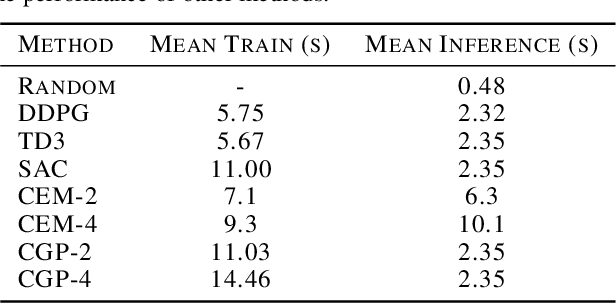
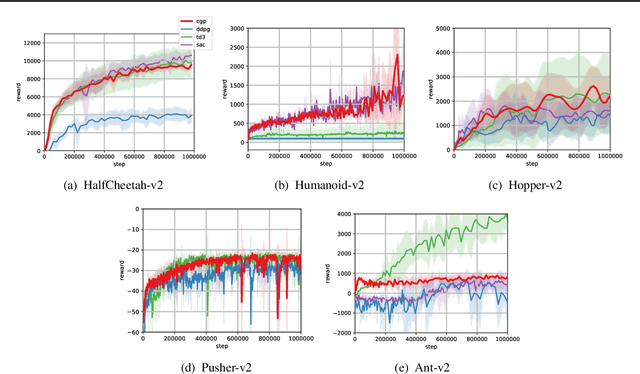
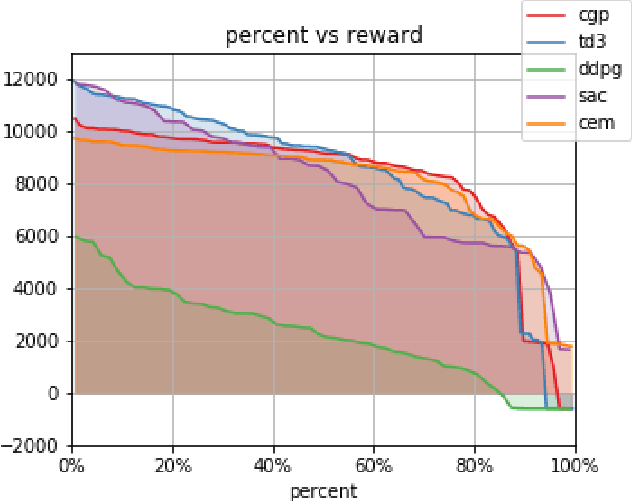
Off-Policy reinforcement learning (RL) is an important class of methods for many problem domains, such as robotics, where the cost of collecting data is high and on-policy methods are consequently intractable. Standard methods for applying Q-learning to continuous-valued action domains involve iteratively sampling the Q-function to find a good action (e.g. via hill-climbing), or by learning a policy network at the same time as the Q-function (e.g. DDPG). Both approaches make tradeoffs between stability, speed, and accuracy. We propose a novel approach, called Cross-Entropy Guided Policies, or CGP, that draws inspiration from both classes of techniques. CGP aims to combine the stability and performance of iterative sampling policies with the low computational cost of a policy network. Our approach trains the Q-function using iterative sampling with the Cross-Entropy Method (CEM), while training a policy network to imitate CEM's sampling behavior. We demonstrate that our method is more stable to train than state of the art policy network methods, while preserving equivalent inference time compute costs, and achieving competitive total reward on standard benchmarks.