 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBin Yao
Global-Position Tracking Control of 3-D Bipedal Walking via Virtual Constraint Design and Multiple Lyapunov Analysis
Aug 08, 2021


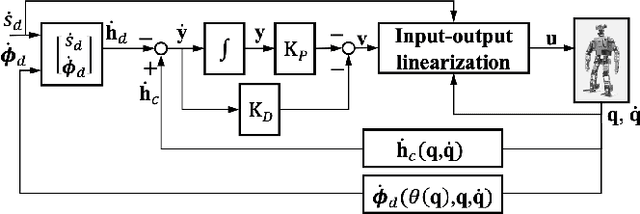
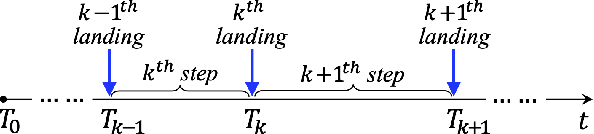
A safety-critical measure of legged locomotion performance is a robot's ability to track its desired time-varying position trajectory in an environment, which is herein termed as "global-position tracking". This paper introduces a nonlinear control approach that achieves asymptotic global-position tracking for three-dimensional (3-D) bipedal robot walking. Designing a global-position tracking controller presents a challenging problem due to the complex hybrid robot model and the time-varying desired global-position trajectory. Towards tackling this problem, the first main contribution is the construction of impact invariance to ensure all desired trajectories respect the foot-landing impact dynamics, which is a necessary condition for realizing asymptotic tracking of hybrid walking systems. Thanks to their independence of the desired global position, these conditions can be exploited to decouple the higher-level planning of the global position and the lower-level planning of the remaining trajectories, thereby greatly alleviating the computational burden of motion planning. The second main contribution is the Lyapunov-based stability analysis of the hybrid closed-loop system, which produces sufficient conditions to guide the controller design for achieving asymptotic global-position tracking during fully actuated walking. Simulations and experiments on a 3-D bipedal robot with twenty revolute joints confirm the validity of the proposed control approach in guaranteeing accurate tracking.
Balancing Efficiency and Flexibility for DNN Acceleration via Temporal GPU-Systolic Array Integration
Feb 18, 2020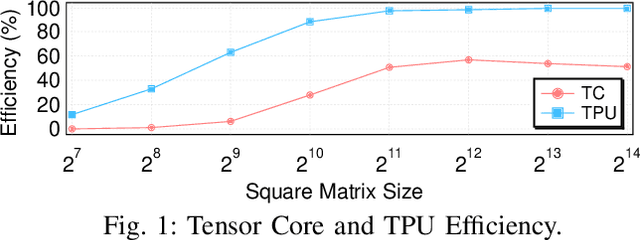
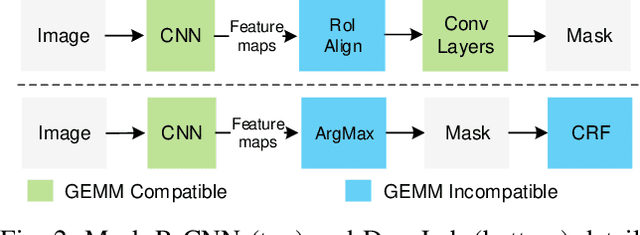
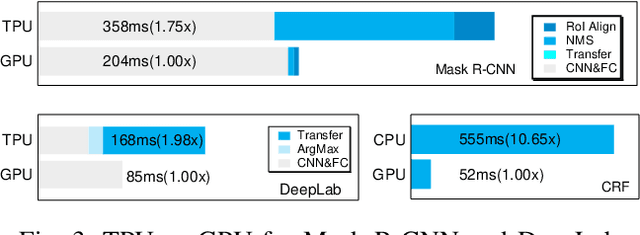
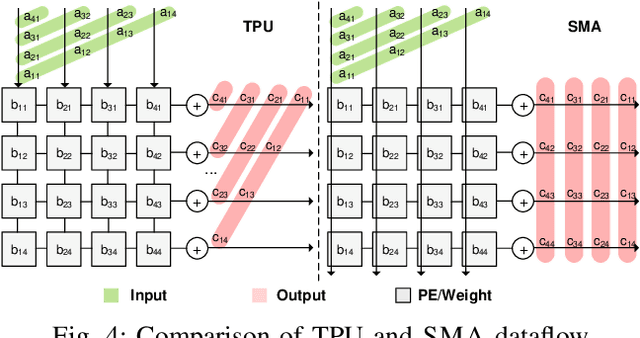
The research interest in specialized hardware accelerators for deep neural networks (DNN) spiked recently owing to their superior performance and efficiency. However, today's DNN accelerators primarily focus on accelerating specific "kernels" such as convolution and matrix multiplication, which are vital but only part of an end-to-end DNN-enabled application. Meaningful speedups over the entire application often require supporting computations that are, while massively parallel, ill-suited to DNN accelerators. Integrating a general-purpose processor such as a CPU or a GPU incurs significant data movement overhead and leads to resource under-utilization on the DNN accelerators. We propose Simultaneous Multi-mode Architecture (SMA), a novel architecture design and execution model that offers general-purpose programmability on DNN accelerators in order to accelerate end-to-end applications. The key to SMA is the temporal integration of the systolic execution model with the GPU-like SIMD execution model. The SMA exploits the common components shared between the systolic-array accelerator and the GPU, and provides lightweight reconfiguration capability to switch between the two modes in-situ. The SMA achieves up to 63% performance improvement while consuming 23% less energy than the baseline Volta architecture with TensorCore.