 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBokui Chen
Large Language Models Powered Context-aware Motion Prediction
Mar 17, 2024
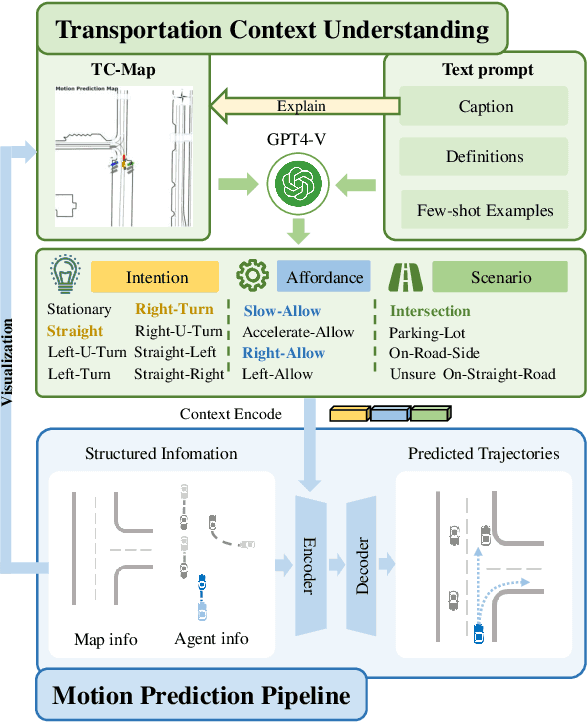
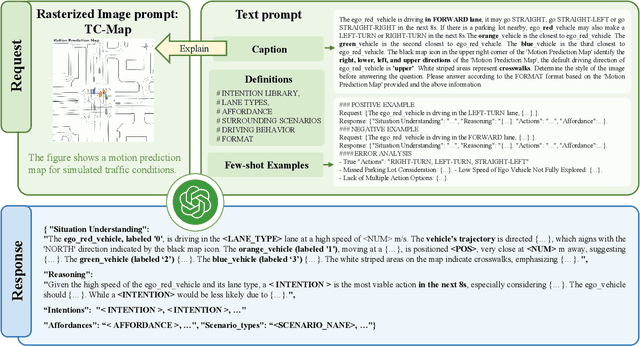

Motion prediction is among the most fundamental tasks in autonomous driving. Traditional methods of motion forecasting primarily encode vector information of maps and historical trajectory data of traffic participants, lacking a comprehensive understanding of overall traffic semantics, which in turn affects the performance of prediction tasks. In this paper, we utilized Large Language Models (LLMs) to enhance the global traffic context understanding for motion prediction tasks. We first conducted systematic prompt engineering, visualizing complex traffic environments and historical trajectory information of traffic participants into image prompts -- Transportation Context Map (TC-Map), accompanied by corresponding text prompts. Through this approach, we obtained rich traffic context information from the LLM. By integrating this information into the motion prediction model, we demonstrate that such context can enhance the accuracy of motion predictions. Furthermore, considering the cost associated with LLMs, we propose a cost-effective deployment strategy: enhancing the accuracy of motion prediction tasks at scale with 0.7\% LLM-augmented datasets. Our research offers valuable insights into enhancing the understanding of traffic scenes of LLMs and the motion prediction performance of autonomous driving.
INCPrompt: Task-Aware incremental Prompting for Rehearsal-Free Class-incremental Learning
Jan 22, 2024This paper introduces INCPrompt, an innovative continual learning solution that effectively addresses catastrophic forgetting. INCPrompt's key innovation lies in its use of adaptive key-learner and task-aware prompts that capture task-relevant information. This unique combination encapsulates general knowledge across tasks and encodes task-specific knowledge. Our comprehensive evaluation across multiple continual learning benchmarks demonstrates INCPrompt's superiority over existing algorithms, showing its effectiveness in mitigating catastrophic forgetting while maintaining high performance. These results highlight the significant impact of task-aware incremental prompting on continual learning performance.
P2DT: Mitigating Forgetting in task-incremental Learning with progressive prompt Decision Transformer
Jan 22, 2024Catastrophic forgetting poses a substantial challenge for managing intelligent agents controlled by a large model, causing performance degradation when these agents face new tasks. In our work, we propose a novel solution - the Progressive Prompt Decision Transformer (P2DT). This method enhances a transformer-based model by dynamically appending decision tokens during new task training, thus fostering task-specific policies. Our approach mitigates forgetting in continual and offline reinforcement learning scenarios. Moreover, P2DT leverages trajectories collected via traditional reinforcement learning from all tasks and generates new task-specific tokens during training, thereby retaining knowledge from previous studies. Preliminary results demonstrate that our model effectively alleviates catastrophic forgetting and scales well with increasing task environments.