 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBrian Milch
SPOOK: A System for Probabilistic Object-Oriented Knowledge Representation
Jan 23, 2013
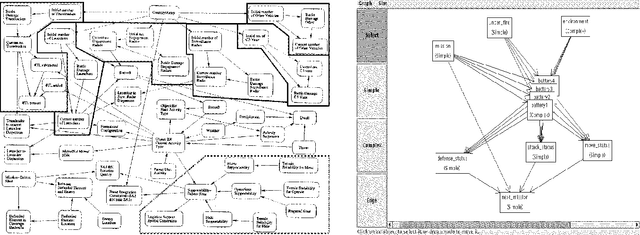
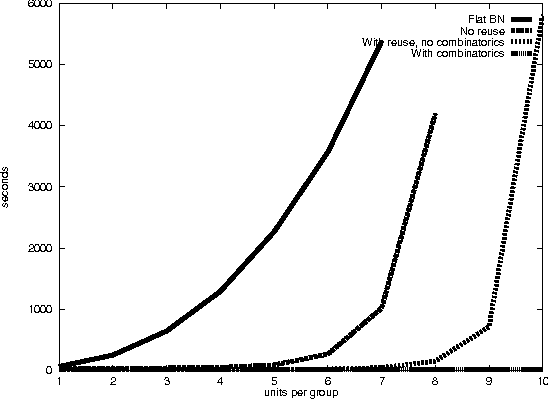
In previous work, we pointed out the limitations of standard Bayesian networks as a modeling framework for large, complex domains. We proposed a new, richly structured modeling language, {em Object-oriented Bayesian Netorks}, that we argued would be able to deal with such domains. However, it turns out that OOBNs are not expressive enough to model many interesting aspects of complex domains: the existence of specific named objects, arbitrary relations between objects, and uncertainty over domain structure. These aspects are crucial in real-world domains such as battlefield awareness. In this paper, we present SPOOK, an implemented system that addresses these limitations. SPOOK implements a more expressive language that allows it to represent the battlespace domain naturally and compactly. We present a new inference algorithm that utilizes the model structure in a fundamental way, and show empirically that it achieves orders of magnitude speedup over existing approaches.
Probabilistic Models for Agents' Beliefs and Decisions
Jan 16, 2013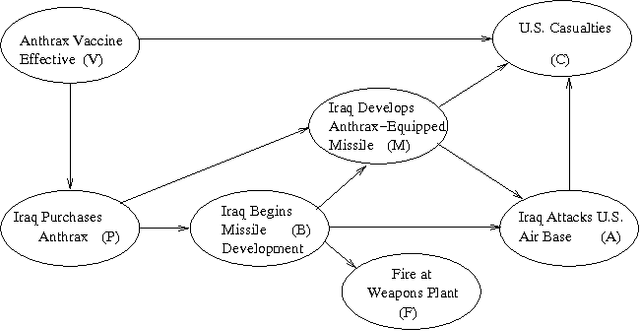
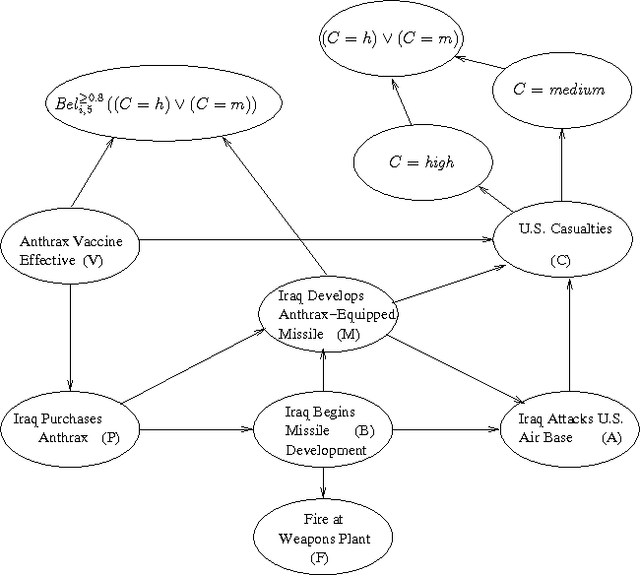
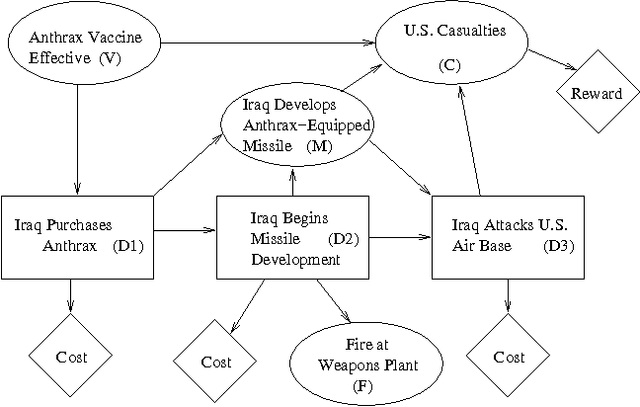
Many applications of intelligent systems require reasoning about the mental states of agents in the domain. We may want to reason about an agent's beliefs, including beliefs about other agents; we may also want to reason about an agent's preferences, and how his beliefs and preferences relate to his behavior. We define a probabilistic epistemic logic (PEL) in which belief statements are given a formal semantics, and provide an algorithm for asserting and querying PEL formulas in Bayesian networks. We then show how to reason about an agent's behavior by modeling his decision process as an influence diagram and assuming that he behaves rationally. PEL can then be used for reasoning from an agent's observed actions to conclusions about other aspects of the domain, including unobserved domain variables and the agent's mental states.
General-Purpose MCMC Inference over Relational Structures
Jun 27, 2012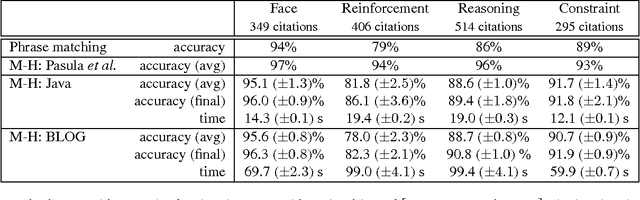
Tasks such as record linkage and multi-target tracking, which involve reconstructing the set of objects that underlie some observed data, are particularly challenging for probabilistic inference. Recent work has achieved efficient and accurate inference on such problems using Markov chain Monte Carlo (MCMC) techniques with customized proposal distributions. Currently, implementing such a system requires coding MCMC state representations and acceptance probability calculations that are specific to a particular application. An alternative approach, which we pursue in this paper, is to use a general-purpose probabilistic modeling language (such as BLOG) and a generic Metropolis-Hastings MCMC algorithm that supports user-supplied proposal distributions. Our algorithm gains flexibility by using MCMC states that are only partial descriptions of possible worlds; we provide conditions under which MCMC over partial worlds yields correct answers to queries. We also show how to use a context-specific Bayes net to identify the factors in the acceptance probability that need to be computed for a given proposed move. Experimental results on a citation matching task show that our general-purpose MCMC engine compares favorably with an application-specific system.
Learning Probabilistic Relational Dynamics for Multiple Tasks
Jun 20, 2012
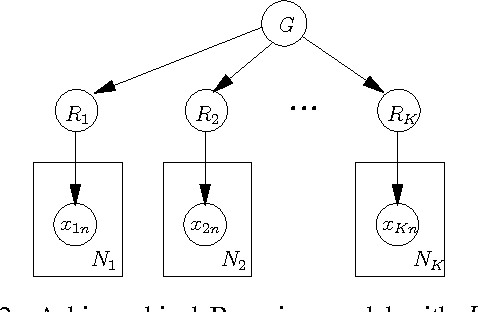
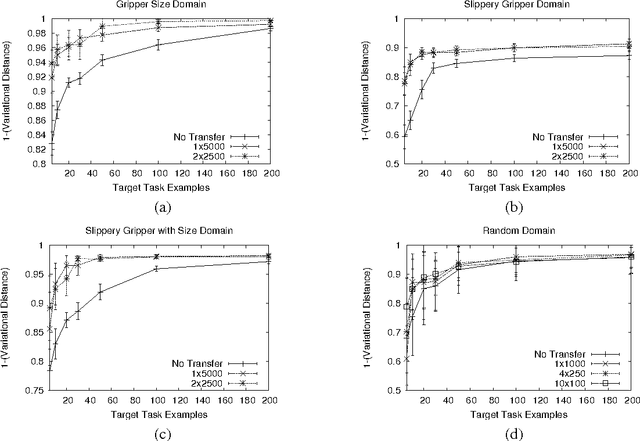
The ways in which an agent's actions affect the world can often be modeled compactly using a set of relational probabilistic planning rules. This paper addresses the problem of learning such rule sets for multiple related tasks. We take a hierarchical Bayesian approach, in which the system learns a prior distribution over rule sets. We present a class of prior distributions parameterized by a rule set prototype that is stochastically modified to produce a task-specific rule set. We also describe a coordinate ascent algorithm that iteratively optimizes the task-specific rule sets and the prior distribution. Experiments using this algorithm show that transferring information from related tasks significantly reduces the amount of training data required to predict action effects in blocks-world domains.