 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeC. David Remy
Swing-Up of a Weakly Actuated Double Pendulum via Nonlinear Normal Modes
Apr 12, 2024
We identify the nonlinear normal modes spawning from the stable equilibrium of a double pendulum under gravity, and we establish their connection to homoclinic orbits through the unstable upright position as energy increases. This result is exploited to devise an efficient swing-up strategy for a double pendulum with weak, saturating actuators. Our approach involves stabilizing the system onto periodic orbits associated with the nonlinear modes while gradually injecting energy. Since these modes are autonomous system evolutions, the required control effort for stabilization is minimal. Even with actuator limitations of less than 1% of the maximum gravitational torque, the proposed method accomplishes the swing-up of the double pendulum by allowing sufficient time.
An Approach for Generating Families of Energetically Optimal Gaits from Passive Dynamic Walking Gaits
Mar 26, 2023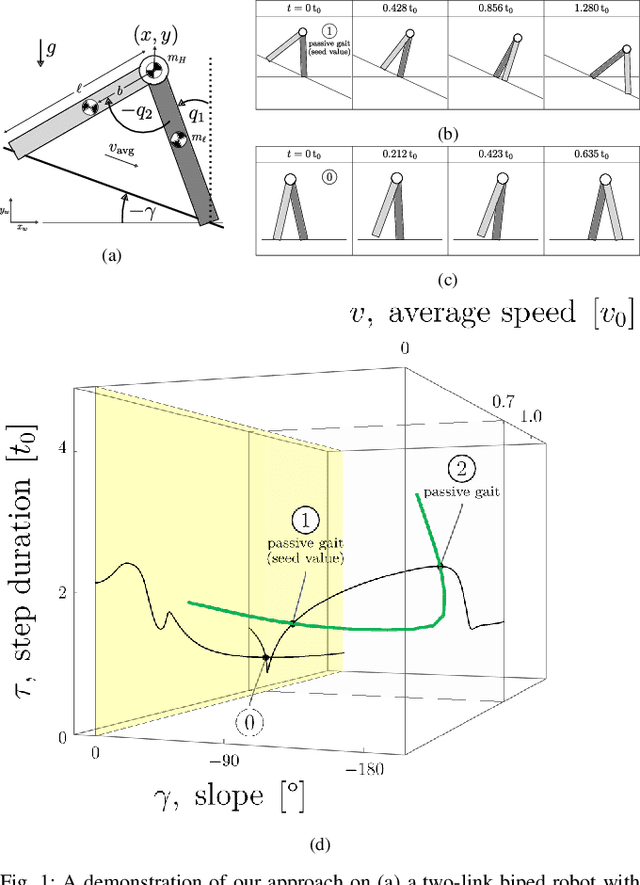
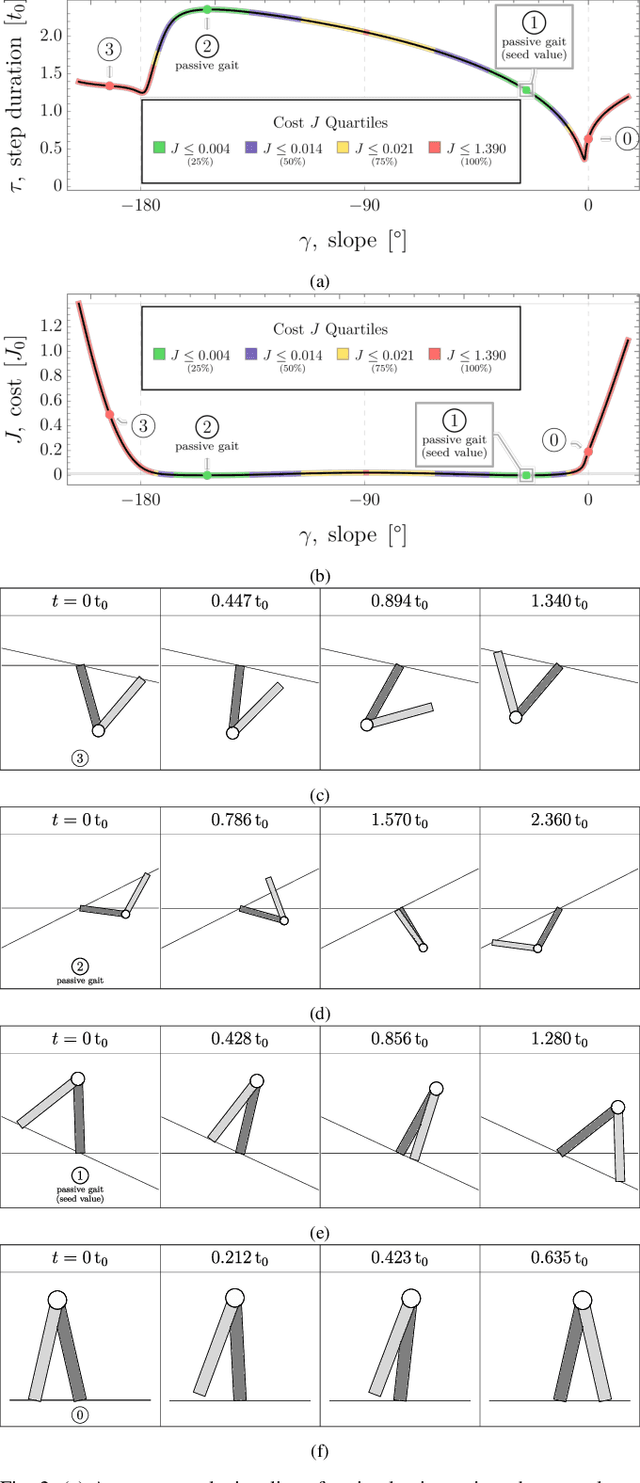
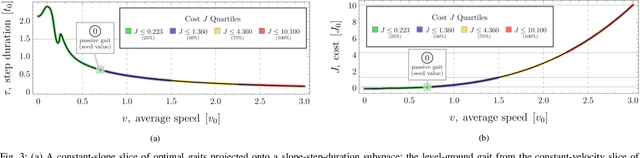
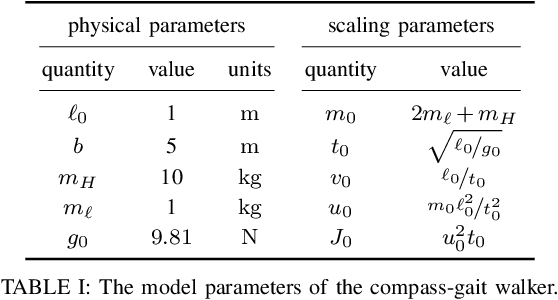
For a class of biped robots with impulsive dynamics and a non-empty set of passive gaits (unactuated, periodic motions of the biped model), we present a method for computing continuous families of locally optimal gaits with respect to a class of commonly used energetic cost functions (e.g., the integral of torque-squared). We compute these families using only the passive gaits of the biped, which are globally optimal gaits with respect to these cost functions. Our approach fills in an important gap in the literature when computing a library of locally optimal gaits, which often do not make use of these globally optimal solutions as seed values. We demonstrate our approach on a well-studied two-link biped model.
Connecting Gaits in Energetically Conservative Legged Systems
Feb 25, 2022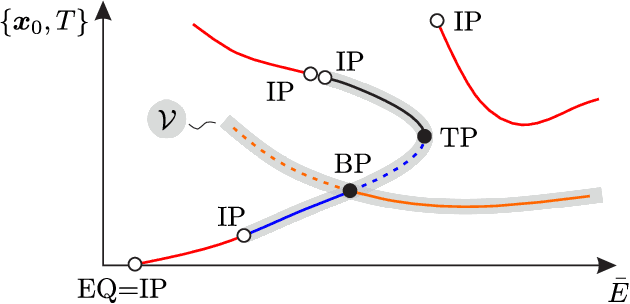
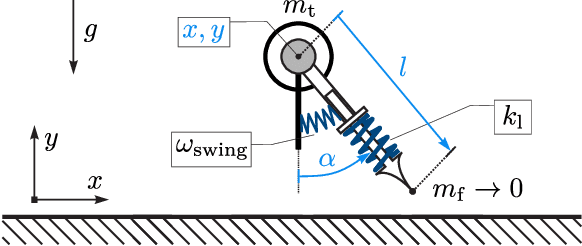
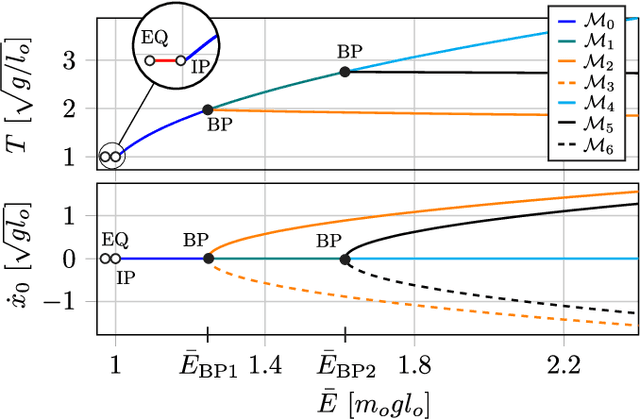
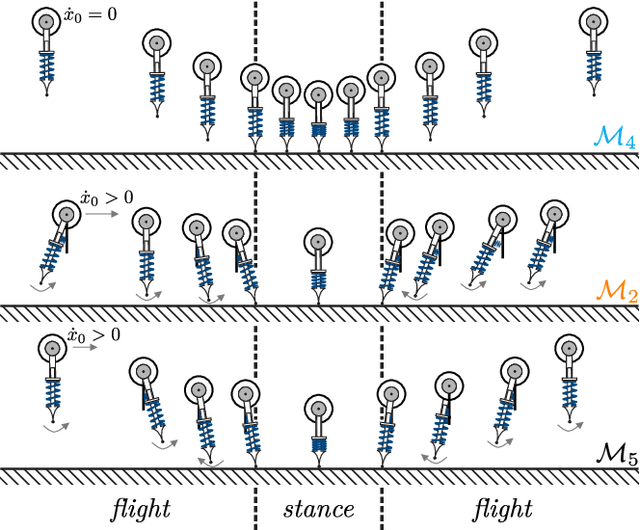
In this work, we present a nonlinear dynamics perspective on generating and connecting gaits for energetically conservative models of legged systems. In particular, we show that the set of conservative gaits constitutes a connected space of locally defined 1D submanifolds in the gait space. These manifolds are coordinate-free parameterized by energy level. We present algorithms for identifying such families of gaits through the use of numerical continuation methods, generating sets and bifurcation points. To this end, we also introduce several details for the numerical implementation. Most importantly, we establish the necessary condition for the Delassus' matrix to preserve energy across impacts. An important application of our work is with simple models of legged locomotion that are often able to capture the complexity of legged locomotion with just a few degrees of freedom and a small number of physical parameters. We demonstrate the efficacy of our framework on a one-legged hopper with four degrees of freedom.
Design and Control of a Recovery System for Legged Robots
Nov 29, 2021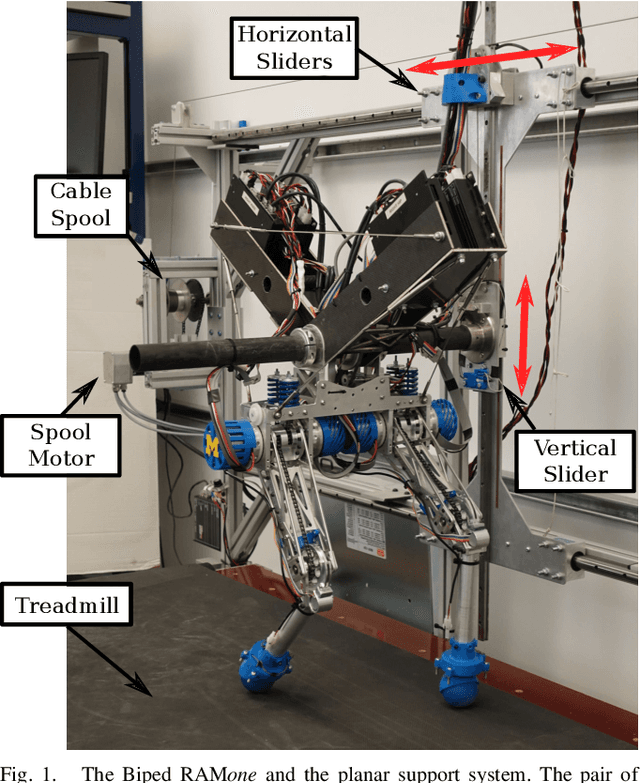
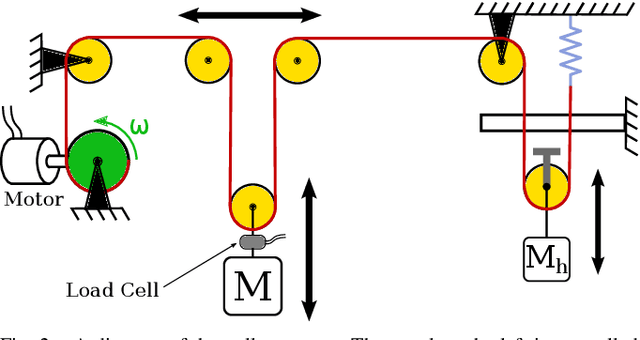
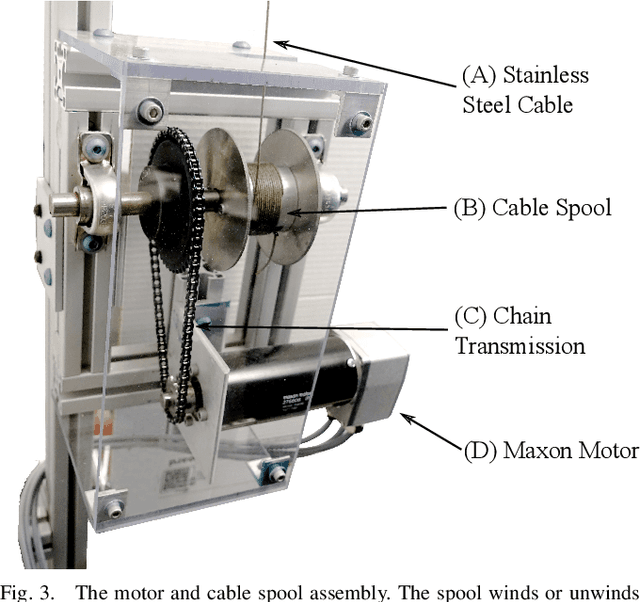
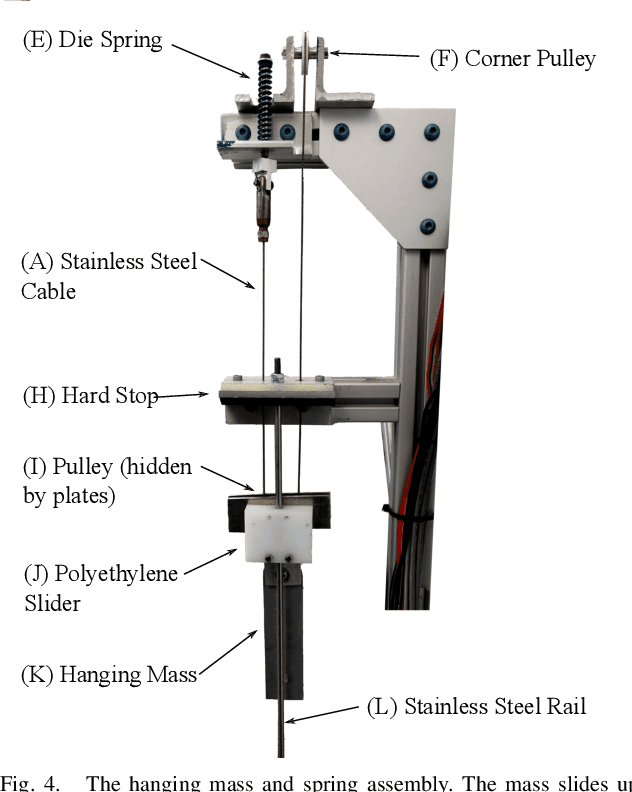
This paper describes the design and control of a support and recovery system for use with planar legged robots. The system operates in three modes. First, it can be operated in a fully transparent mode where no forces are applied to the robot. In this mode, the system follows the robot closely to be able to quickly catch the robot if needed. Second, it can provide a vertical supportive force to assist a robot during operation. Third, it can catch the robot and pull it away from the ground after a failure to avoid falls and the associated damages. In this mode, the system automatically resets the robot after a trial allowing for multiple consecutive trials to be run without manual intervention. The supportive forces are applied to the robot through an actuated cable and pulley system that uses series elastic actuation with a unidirectional spring to enable truly transparent operation. The nonlinear nature of this system necessitates careful design of controllers to ensure predictable, safe behaviors. In this paper we introduce the mechatronic design of the recovery system, develop suitable controllers, and evaluate the system's performance on the bipedal robot RAMone.
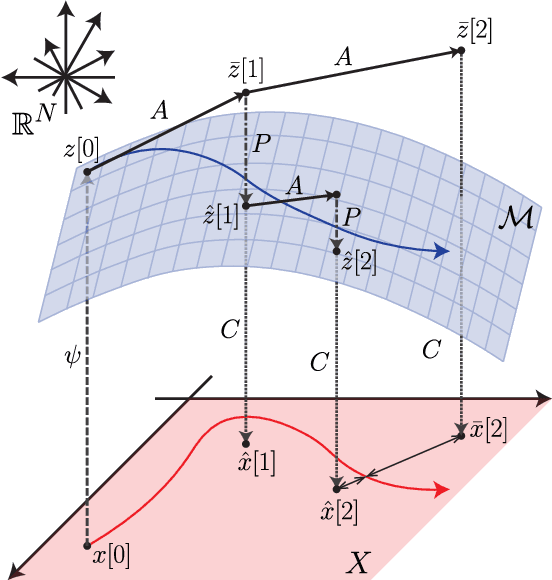
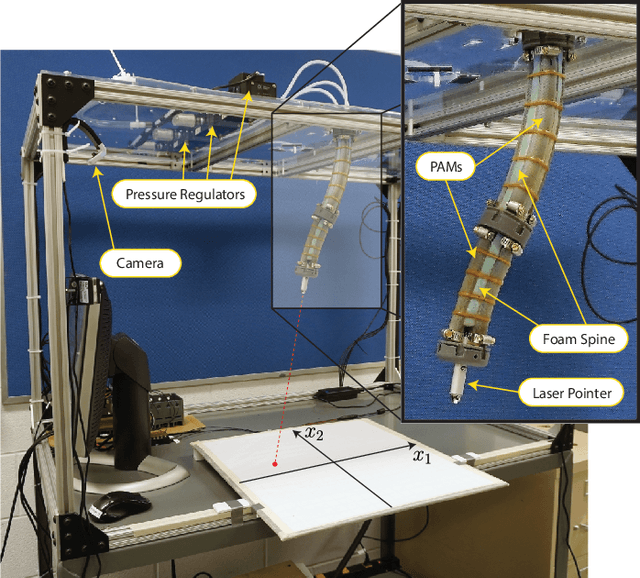
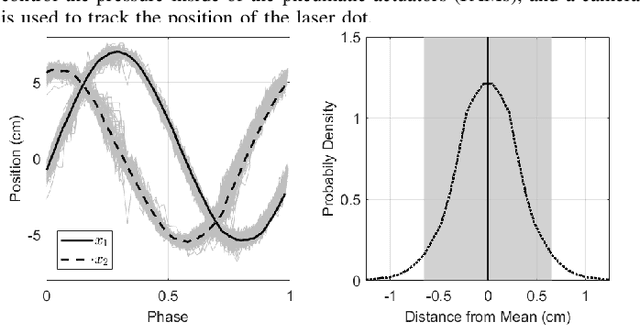
Koopman-based Control of a Soft Continuum Manipulator Under Variable Loading Conditions
Feb 04, 2020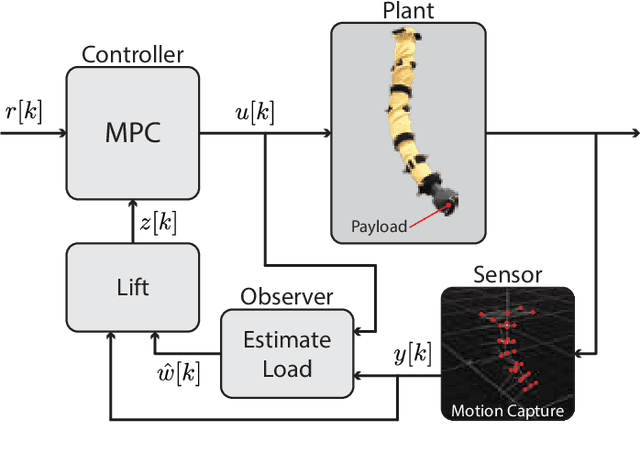
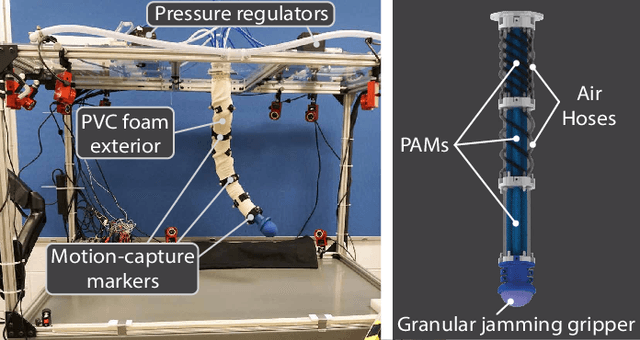
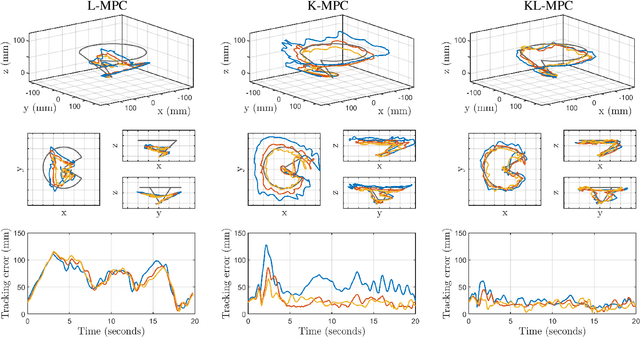
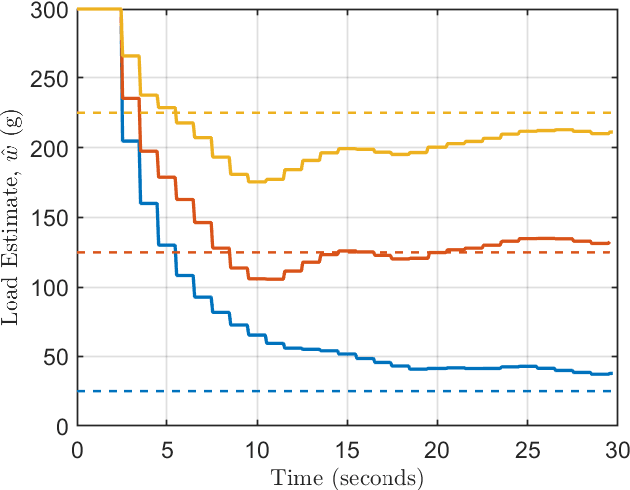
Controlling soft continuum manipulator arms is difficult due to their infinite degrees of freedom, nonlinear material properties, and large deflections under loading. This paper presents a data-driven approach to identifying soft manipulator models that enables consistent control under variable loading conditions. This is achieved by incorporating loads into a linear Koopman operator model as states and estimating their values online via an observer within the control loop. Using this approach, real-time, fully autonomous control of a pneumatically actuated soft continuum manipulator is achieved. In several trajectory following experiments, this controller is shown to be more accurate and precise than controllers based on models that are unable to explicitly account for loading. The manipulator also successfully performs pick and place of objects with unknown mass, demonstrating the efficacy of this approach in executing real-world manipulation tasks.
Walking with Confidence: Safety Regulation for Full Order Biped Models
Mar 20, 2019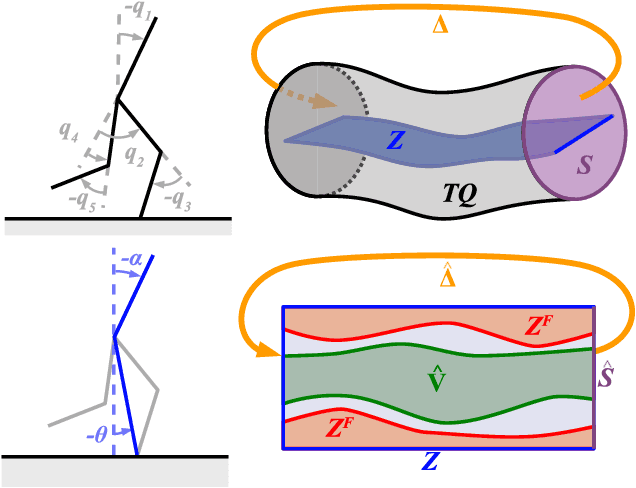
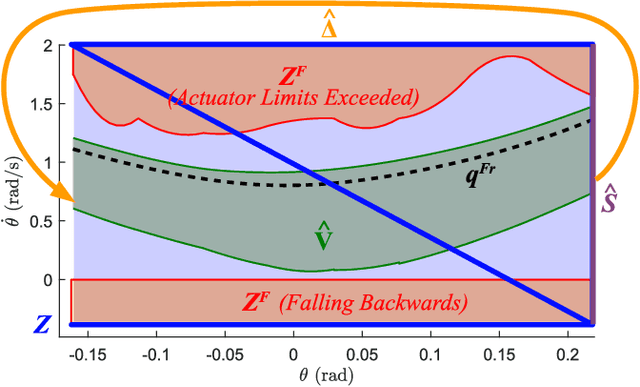
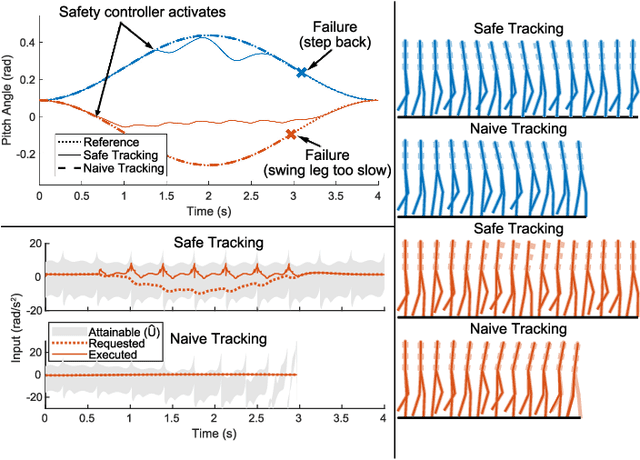
Safety guarantees are valuable in the control of walking robots, as falling can be both dangerous and costly. Unfortunately, set-based tools for generating safety guarantees (such as sums-of-squares optimization) are typically restricted to simplified, low-dimensional models of walking robots. For more complex models, methods based on hybrid zero dynamics can ensure the local stability of a pre-specified limit cycle, but provide limited guarantees. This paper combines the benefits of both approaches by using sums-of-squares optimization on a hybrid zero dynamics manifold to generate a guaranteed safe set for a 10-dimensional walking robot model. Along with this set, this paper describes how to generate a controller that maintains safety by modifying the manifold parameters when on the edge of the safe set. The proposed approach, which is applied to a bipedal Rabbit model, provides a roadmap for applying sums-of-squares verification techniques to high dimensional systems. This opens the door for a broad set of tools that can generate safety guarantees and regulating controllers for complex walking robot models.
Modeling and Control of Soft Robots Using the Koopman Operator and Model Predictive Control
Feb 07, 2019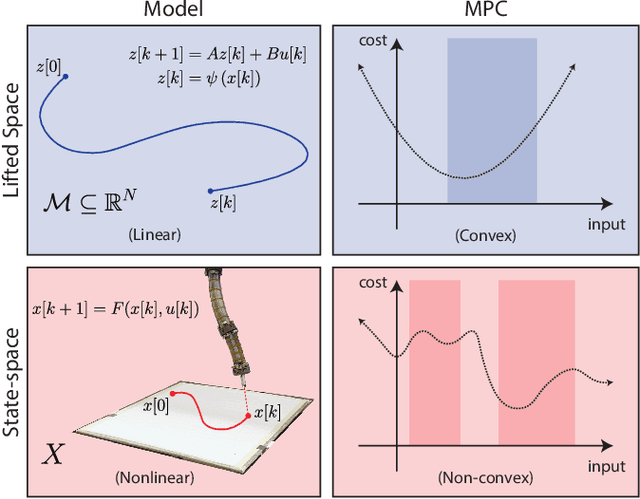
Controlling soft robots with precision is a challenge due in large part to the difficulty of constructing models that are amenable to model-based control design techniques. Koopman Operator Theory offers a way to construct explicit linear dynamical models of soft robots and to control them using established model-based linear control methods. This method is data-driven, yet unlike other data-driven models such as neural networks, it yields an explicit control-oriented linear model rather than just a "black-box" input-output mapping. This work describes this Koopman-based system identification method and its application to model predictive controller design. A model and MPC controller of a pneumatic soft robot arm was constructed via the method, and its performance was evaluated over several trajectory following tasks in the real-world. On all of the tasks, the Koopman-based MPC controller outperformed a benchmark MPC controller based on a linear state-space model of the same system.
Force Generation by Parallel Combinations of Fiber-Reinforced Fluid-Driven Actuators
Oct 26, 2018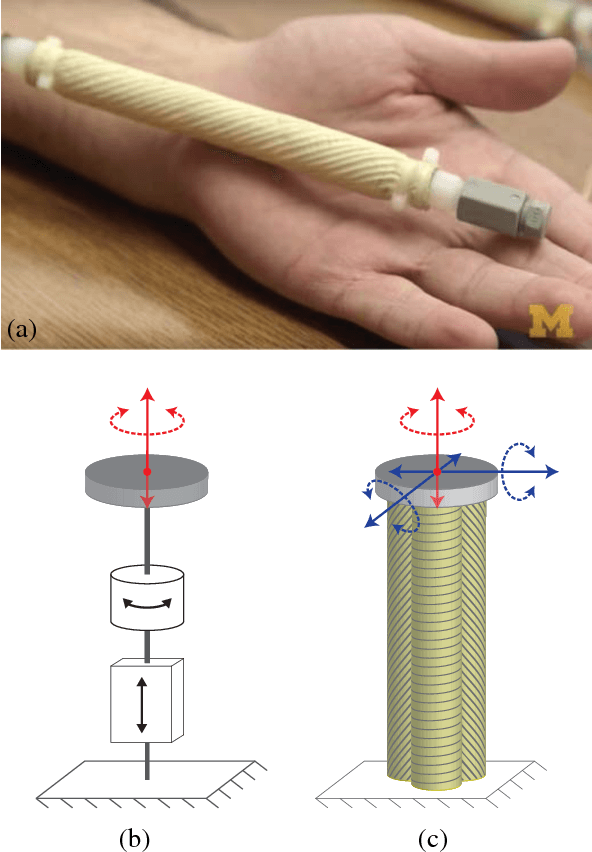
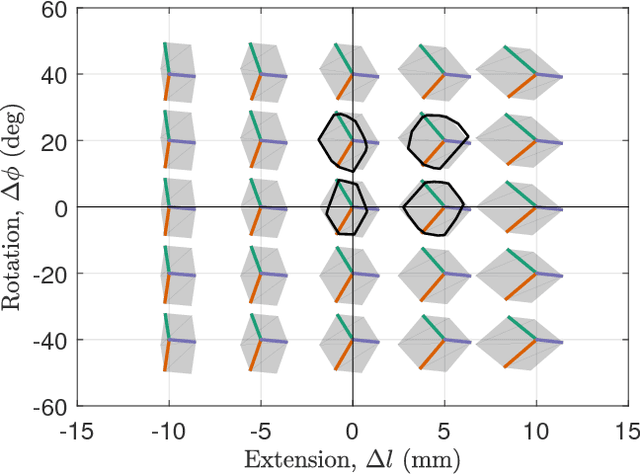
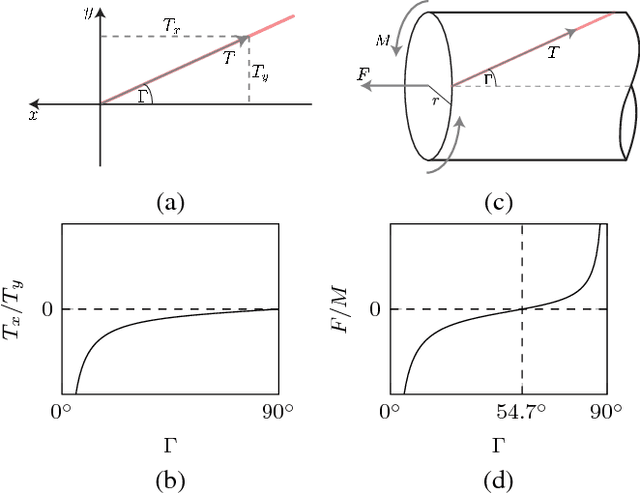
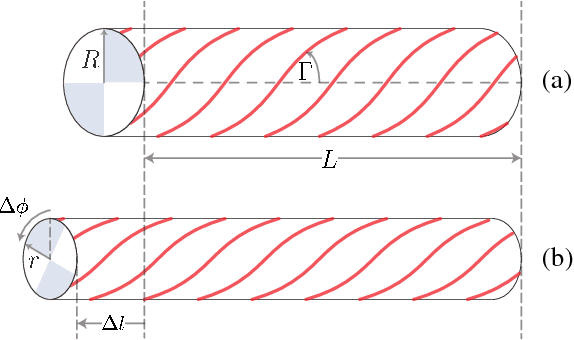
The compliant structure of soft robotic systems enables a variety of novel capabilities in comparison to traditional rigid-bodied robots. A subclass of soft fluid-driven actuators known as fiber reinforced elastomeric enclosures (FREEs) is particularly well suited as actuators for these types of systems. FREEs are inherently soft and can impart spatial forces without imposing a rigid structure. Furthermore, they can be configured to produce a large variety of force and moment combinations. In this paper we explore the potential of combining multiple differently configured FREEs in parallel to achieve fully controllable multi-dimensional soft actuation. To this end, we propose a novel methodology to represent and calculate the generalized forces generated by soft actuators as a function of their internal pressure. This methodology relies on the notion of a state dependent fluid Jacobian that yields a linear expression for force. We employ this concept to construct the set of all possible forces that can be generated by a soft system in a given state. This force zonotope can be used to inform the design and control of parallel combinations of soft actuators. The approach is verified experimentally with the parallel combination of three carefully designed actuators constrained to a 2DOF testing rig. The force predictions matched measured values with a root-mean-square error of less than 1.5 N force and 8 x 10^(-3)Nm moment, demonstrating the utility of the presented methodology.
* Published in IEEE Robotics and Automation Letters
Nonlinear System Identification of Soft Robot Dynamics Using Koopman Operator Theory
Oct 15, 2018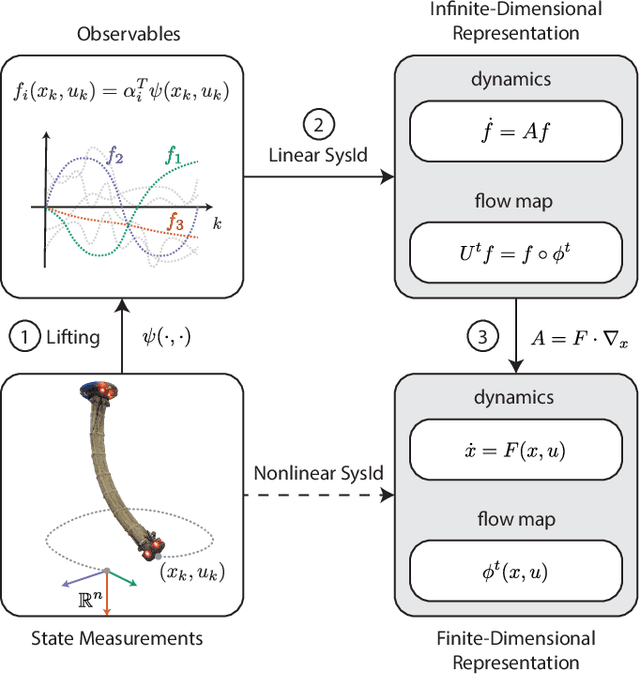
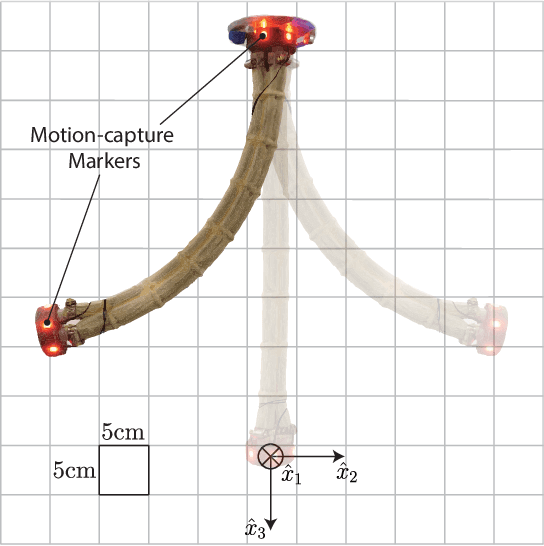
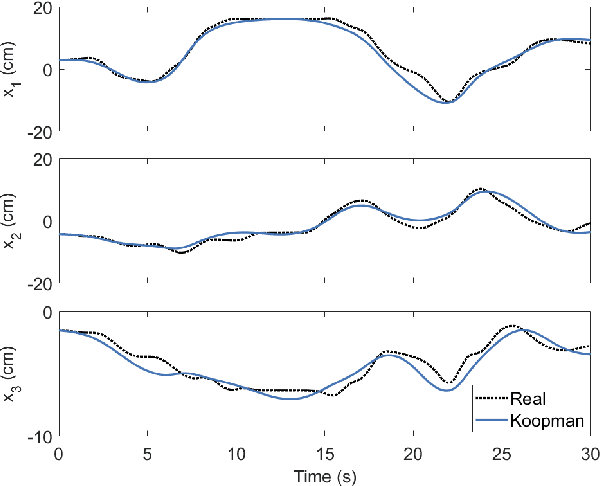
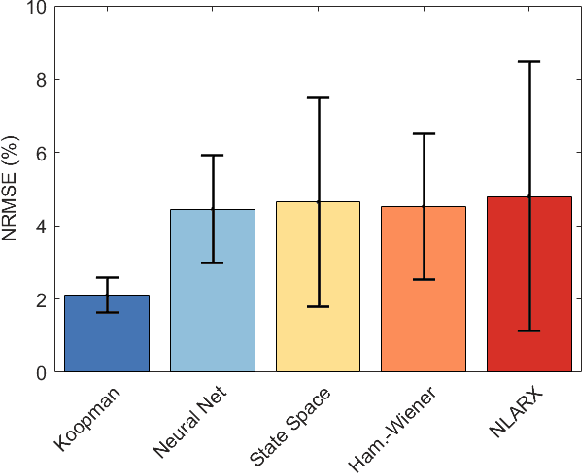
Soft robots are challenging to model due to their nonlinear behavior. However, their soft bodies make it possible to safely observe their behavior under random control inputs, making them amenable to large-scale data collection and system identification. This paper implements and evaluates a system identification method based on Koopman operator theory. This theory offers a way to represent a nonlinear system as a linear system in the infinite-dimensional space of real-valued functions called observables, enabling models of nonlinear systems to be constructed via linear regression of observed data. The approach does not suffer from some of the shortcomings of other nonlinear system identification methods, which typically require the manual tuning of training parameters and have limited convergence guarantees. A dynamic model of a pneumatic soft robot arm is constructed via this method, and used to predict the behavior of the real system. The total normalized-root-mean-square error (NRMSE) of its predictions over twelve validation trials is lower than that of several other identified models including a neural network, NLARX, nonlinear Hammerstein-Wiener, and linear state space model.
Learning Stable and Energetically Economical Walking with RAMone
Nov 03, 2017
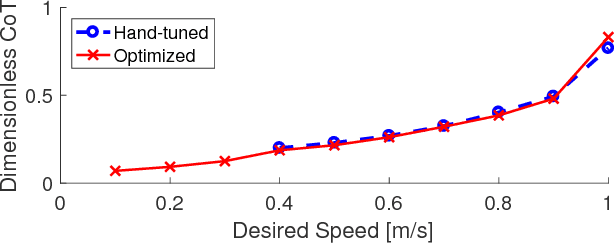
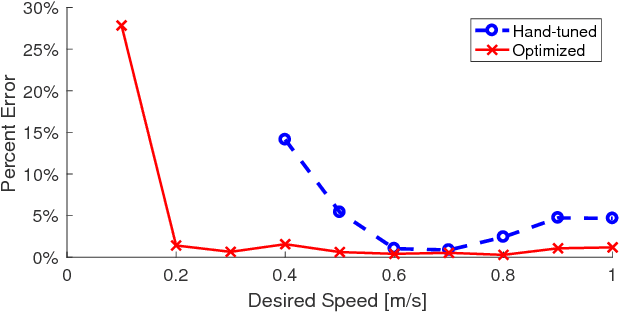
In this paper, we optimize over the control parameter space of our planar-bipedal robot, RAMone, for stable and energetically economical walking at various speeds. We formulate this task as an episodic reinforcement learning problem and use Covariance Matrix Adaptation. The parameters we are interested in modifying include gains from our Hybrid Zero Dynamics style controller and from RAMone's low-level motor controllers.