 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximilian Raff
Swing-Up of a Weakly Actuated Double Pendulum via Nonlinear Normal Modes
Apr 12, 2024
We identify the nonlinear normal modes spawning from the stable equilibrium of a double pendulum under gravity, and we establish their connection to homoclinic orbits through the unstable upright position as energy increases. This result is exploited to devise an efficient swing-up strategy for a double pendulum with weak, saturating actuators. Our approach involves stabilizing the system onto periodic orbits associated with the nonlinear modes while gradually injecting energy. Since these modes are autonomous system evolutions, the required control effort for stabilization is minimal. Even with actuator limitations of less than 1% of the maximum gravitational torque, the proposed method accomplishes the swing-up of the double pendulum by allowing sufficient time.
An Approach for Generating Families of Energetically Optimal Gaits from Passive Dynamic Walking Gaits
Mar 26, 2023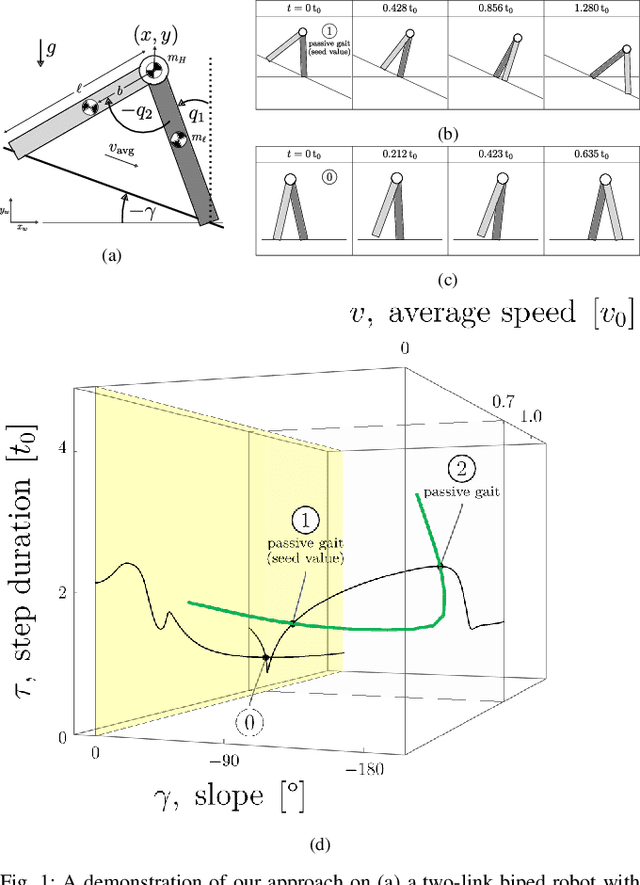
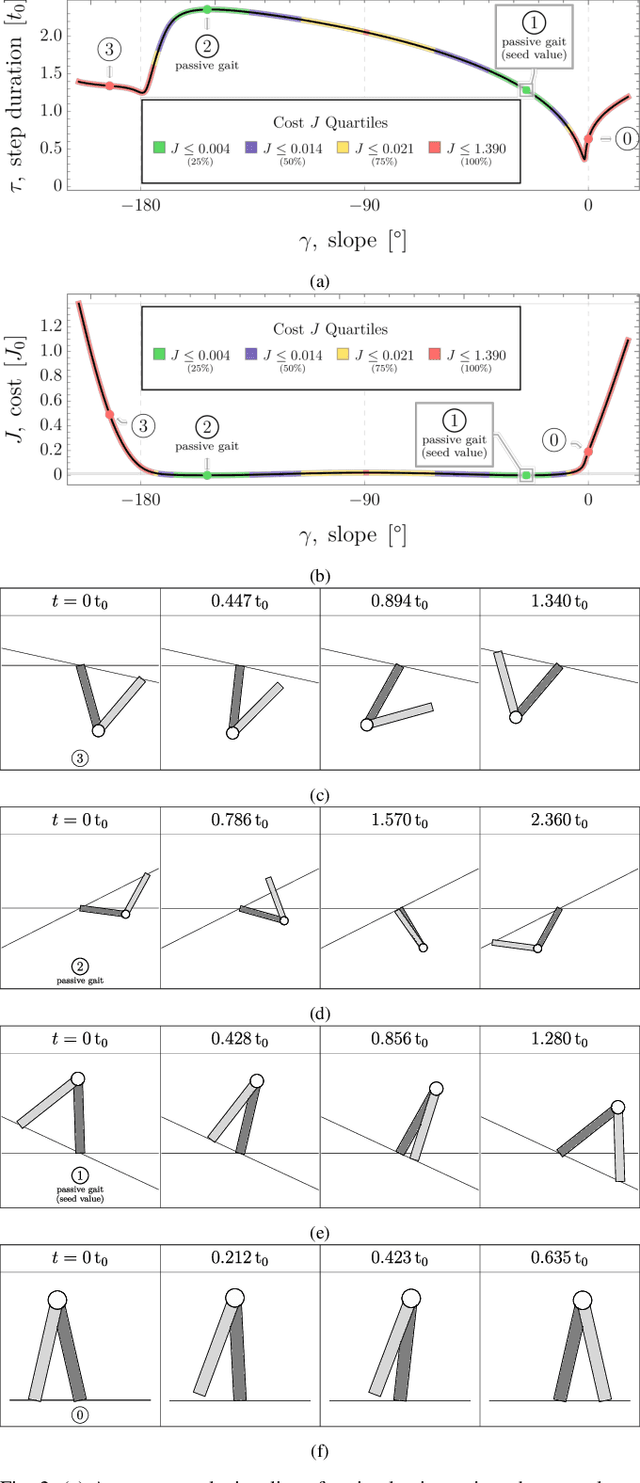
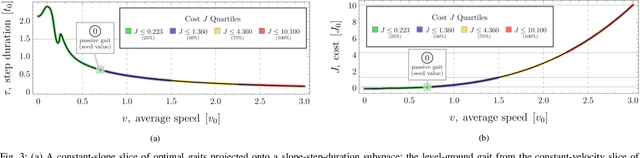
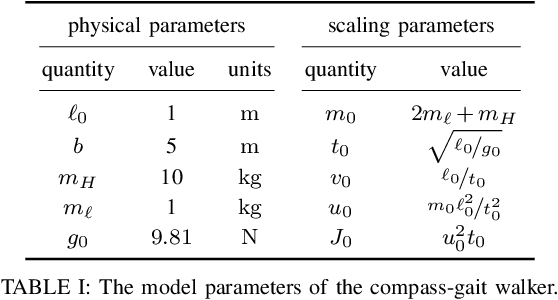
For a class of biped robots with impulsive dynamics and a non-empty set of passive gaits (unactuated, periodic motions of the biped model), we present a method for computing continuous families of locally optimal gaits with respect to a class of commonly used energetic cost functions (e.g., the integral of torque-squared). We compute these families using only the passive gaits of the biped, which are globally optimal gaits with respect to these cost functions. Our approach fills in an important gap in the literature when computing a library of locally optimal gaits, which often do not make use of these globally optimal solutions as seed values. We demonstrate our approach on a well-studied two-link biped model.
Connecting Gaits in Energetically Conservative Legged Systems
Feb 25, 2022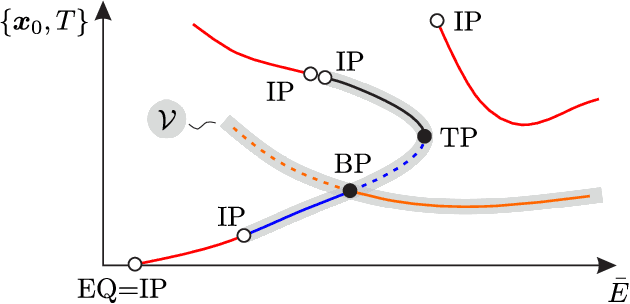
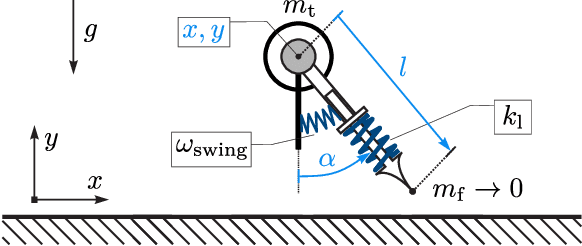
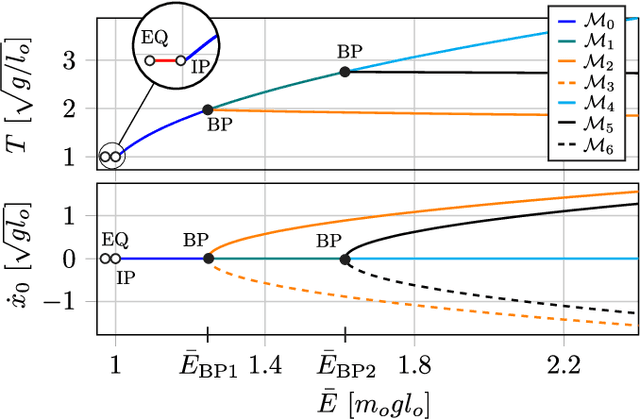
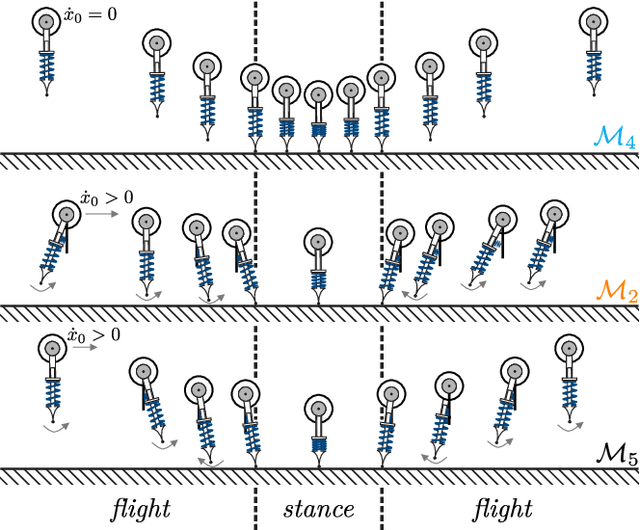
In this work, we present a nonlinear dynamics perspective on generating and connecting gaits for energetically conservative models of legged systems. In particular, we show that the set of conservative gaits constitutes a connected space of locally defined 1D submanifolds in the gait space. These manifolds are coordinate-free parameterized by energy level. We present algorithms for identifying such families of gaits through the use of numerical continuation methods, generating sets and bifurcation points. To this end, we also introduce several details for the numerical implementation. Most importantly, we establish the necessary condition for the Delassus' matrix to preserve energy across impacts. An important application of our work is with simple models of legged locomotion that are often able to capture the complexity of legged locomotion with just a few degrees of freedom and a small number of physical parameters. We demonstrate the efficacy of our framework on a one-legged hopper with four degrees of freedom.