 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCedric Le Gentil
Dynamic Object Detection in Range data using Spatiotemporal Normals
Oct 20, 2023
On the journey to enable robots to interact with the real world where humans, animals, and unpredictable elements are acting as independent agents; it is crucial for robots to have the capability to detect dynamic objects. In this paper, we argue that the detection of dynamic objects can be solved by computing the spatiotemporal normals of a point cloud. In our experiments, we demonstrate that this simple method can be used robustly for LiDAR and depth cameras with performances similar to the state of the art while offering a significantly simpler method.
Continuous-Time Gaussian Process Motion-Compensation for Event-vision Pattern Tracking with Distance Fields
Mar 05, 2023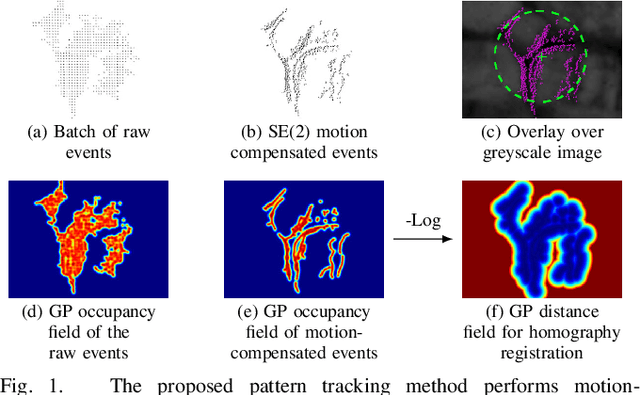
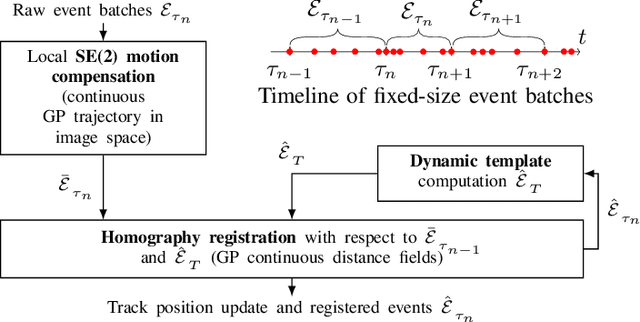
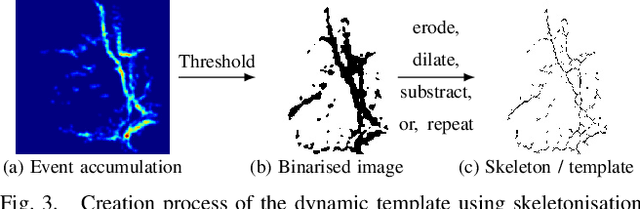
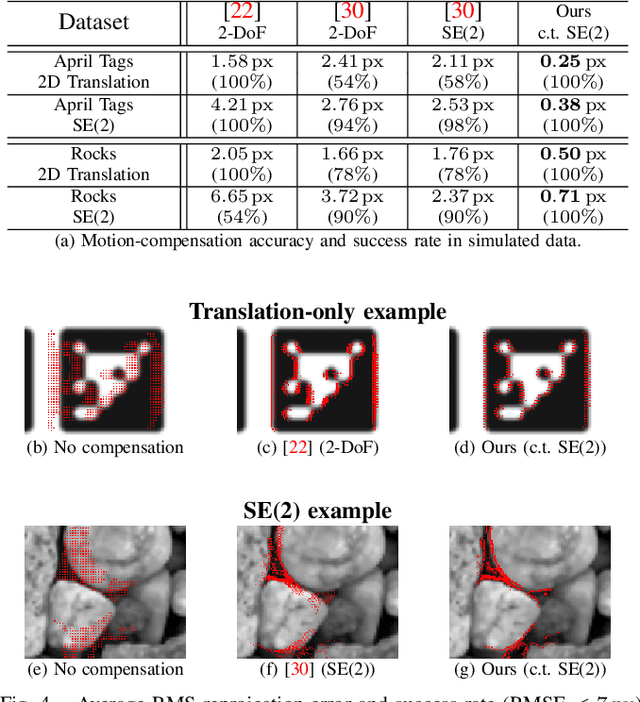
This work addresses the issue of motion compensation and pattern tracking in event camera data. An event camera generates asynchronous streams of events triggered independently by each of the pixels upon changes in the observed intensity. Providing great advantages in low-light and rapid-motion scenarios, such unconventional data present significant research challenges as traditional vision algorithms are not directly applicable to this sensing modality. The proposed method decomposes the tracking problem into a local SE(2) motion-compensation step followed by a homography registration of small motion-compensated event batches. The first component relies on Gaussian Process (GP) theory to model the continuous occupancy field of the events in the image plane and embed the camera trajectory in the covariance kernel function. In doing so, estimating the trajectory is done similarly to GP hyperparameter learning by maximising the log marginal likelihood of the data. The continuous occupancy fields are turned into distance fields and used as templates for homography-based registration. By benchmarking the proposed method against other state-of-the-art techniques, we show that our open-source implementation performs high-accuracy motion compensation and produces high-quality tracks in real-world scenarios.
Accurate Gaussian Process Distance Fields with applications to Echolocation and Mapping
Feb 25, 2023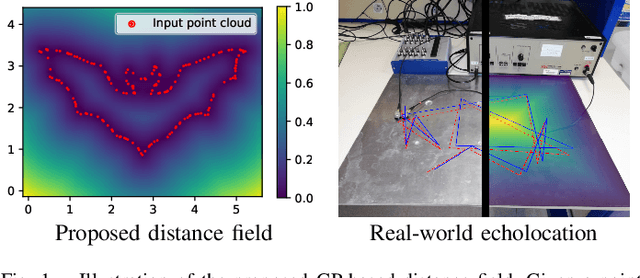
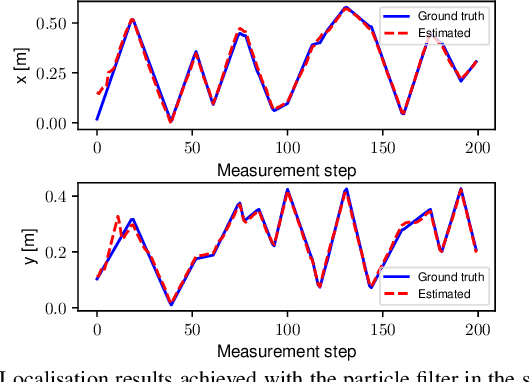
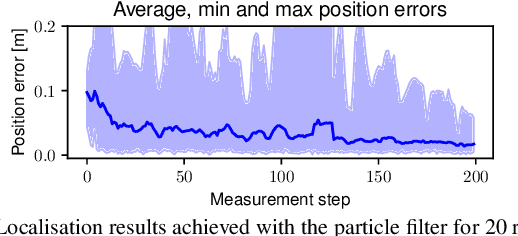
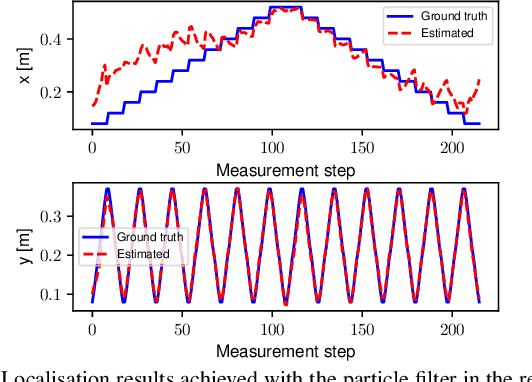
This paper introduces a novel method to estimate distance fields from noisy point clouds using Gaussian Process (GP) regression. Distance fields, or distance functions, gained popularity for applications like point cloud registration, odometry, SLAM, path planning, shape reconstruction, etc. A distance field provides a continuous representation of the scene. It is defined as the shortest distance from any query point and the closest surface. The key concept of the proposed method is a reverting function used to turn a GP-inferred occupancy field into an accurate distance field. The reverting function is specific to the chosen GP kernel. This paper provides the theoretical derivation of the proposed method and its relationship to existing techniques. The improved accuracy compared with existing distance fields is demonstrated with extensive simulated experiments. The level of accuracy of the proposed approach allows for novel applications that rely on precise distance estimation. Thus, alongside 3D point cloud registration, this work presents echolocation and mapping frameworks using ultrasonic guided waves sensing metallic structures. These methods leverage the proposed distance field in physics-based models to simulate the signal propagation and compare it with the actual signal received. Both simulated and real-world experiments are conducted to demonstrate the soundness of these frameworks.
GPGM-SLAM: a Robust SLAM System for Unstructured Planetary Environments with Gaussian Process Gradient Maps
Sep 14, 2021



Simultaneous Localization and Mapping (SLAM) techniques play a key role towards long-term autonomy of mobile robots due to the ability to correct localization errors and produce consistent maps of an environment over time. Contrarily to urban or man-made environments, where the presence of unique objects and structures offer unique cues for localization, the appearance of unstructured natural environments is often ambiguous and self-similar, hindering the performances of loop closure detection. In this paper, we present an approach to improve the robustness of place recognition in the context of a submap-based stereo SLAM based on Gaussian Process Gradient Maps (GPGMaps). GPGMaps embed a continuous representation of the gradients of the local terrain elevation by means of Gaussian Process regression and Structured Kernel Interpolation, given solely noisy elevation measurements. We leverage the image-like structure of GPGMaps to detect loop closures using traditional visual features and Bag of Words. GPGMap matching is performed as an SE(2) alignment to establish loop closure constraints within a pose graph. We evaluate the proposed pipeline on a variety of datasets recorded on Mt. Etna, Sicily and in the Morocco desert, respectively Moon- and Mars-like environments, and we compare the localization performances with state-of-the-art approaches for visual SLAM and visual loop closure detection.
Gaussian Process Gradient Maps for Loop-Closure Detection in Unstructured Planetary Environments
Sep 01, 2020



The ability to recognize previously mapped locations is an essential feature for autonomous systems. Unstructured planetary-like environments pose a major challenge to these systems due to the similarity of the terrain. As a result, the ambiguity of the visual appearance makes state-of-the-art visual place recognition approaches less effective than in urban or man-made environments. This paper presents a method to solve the loop closure problem using only spatial information. The key idea is to use a novel continuous and probabilistic representations of terrain elevation maps. Given 3D point clouds of the environment, the proposed approach exploits Gaussian Process (GP) regression with linear operators to generate continuous gradient maps of the terrain elevation information. Traditional image registration techniques are then used to search for potential matches. Loop closures are verified by leveraging both the spatial characteristic of the elevation maps (SE(2) registration) and the probabilistic nature of the GP representation. A submap-based localization and mapping framework is used to demonstrate the validity of the proposed approach. The performance of this pipeline is evaluated and benchmarked using real data from a rover that is equipped with a stereo camera and navigates in challenging, unstructured planetary-like environments in Morocco and on Mt. Etna.
IDOL: A Framework for IMU-DVS Odometry using Lines
Aug 13, 2020



In this paper, we introduce IDOL, an optimization-based framework for IMU-DVS Odometry using Lines. Event cameras, also called Dynamic Vision Sensors (DVSs), generate highly asynchronous streams of events triggered upon illumination changes for each individual pixel. This novel paradigm presents advantages in low illumination conditions and high-speed motions. Nonetheless, this unconventional sensing modality brings new challenges to perform scene reconstruction or motion estimation. The proposed method offers to leverage a continuous-time representation of the inertial readings to associate each event with timely accurate inertial data. The method's front-end extracts event clusters that belong to line segments in the environment whereas the back-end estimates the system's trajectory alongside the lines' 3D position by minimizing point-to-line distances between individual events and the lines' projection in the image space. A novel attraction/repulsion mechanism is presented to accurately estimate the lines' extremities, avoiding their explicit detection in the event data. The proposed method is benchmarked against a state-of-the-art frame-based visual-inertial odometry framework using public datasets. The results show that IDOL performs at the same order of magnitude on most datasets and even shows better orientation estimates. These findings can have a great impact on new algorithms for DVS.
IN2LAAMA: INertial Lidar Localisation Autocalibration And MApping
May 23, 2019



In this paper, we present INertial Lidar Localisation Autocalibration And MApping (IN2LAAMA): a probabilistic framework for localisation, mapping, and extrinsic calibration based on a 3D-lidar and a 6-DoF-IMU. Most of today's lidars collect geometric information about the surrounding environment by sweeping lasers across their field of view. Consequently, 3D-points in one lidar scan are acquired at different timestamps. If the sensor trajectory is not accurately known, the scans are affected by the phenomenon known as motion distortion. The proposed method leverages preintegration with a continuous representation of the inertial measurements to characterise the system's motion at any point in time. It enables precise correction of the motion distortion without relying on any explicit motion model. The system's pose, velocity, biases, and time-shift are estimated via a full batch optimisation that includes automatically generated loop-closure constraints. The autcalibration and the registration of lidar data relies on planar and edge features matched across pairs of scans. The performance of the framework is validated through simulated and real-data experiments.