 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDengbo He
GPT as Psychologist? Preliminary Evaluations for GPT-4V on Visual Affective Computing
Mar 09, 2024

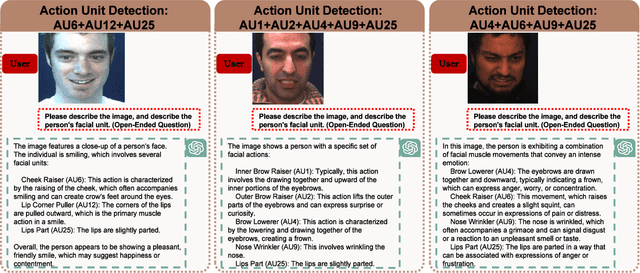
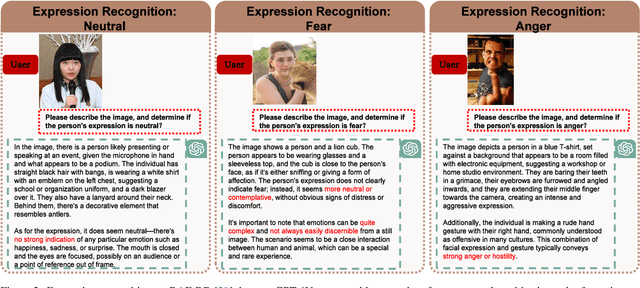
Multimodal language models (MLMs) are designed to process and integrate information from multiple sources, such as text, speech, images, and videos. Despite its success in language understanding, it is critical to evaluate the performance of downstream tasks for better human-centric applications. This paper assesses the application of MLMs with 5 crucial abilities for affective computing, spanning from visual affective tasks and reasoning tasks. The results show that GPT4 has high accuracy in facial action unit recognition and micro-expression detection while its general facial expression recognition performance is not accurate. We also highlight the challenges of achieving fine-grained micro-expression recognition and the potential for further study and demonstrate the versatility and potential of GPT4 for handling advanced tasks in emotion recognition and related fields by integrating with task-related agents for more complex tasks, such as heart rate estimation through signal processing. In conclusion, this paper provides valuable insights into the potential applications and challenges of MLMs in human-centric computing. The interesting samples are available at \url{https://github.com/LuPaoPao/GPT4Affectivity}.
Evaluation and Control Model Design of Human Factors for Autonomous Driving Systems
Jul 03, 2023



With the fast development of driving automation technologies, user psychological acceptance of driving automation has become one of the major obstacles to the adoption of the driving automation technology. The most basic function of a passenger car is to transport passengers or drivers to their destinations safely and comfortably. Thus, the design of the driving automation should not just guarantee the safety of vehicle operation but also ensure occupant subjective level of comfort. Hence this paper proposes a local path planning algorithm for obstacle avoidance with occupant subjective feelings considered. Firstly, turning and obstacle avoidance conditions are designed, and four classifiers in machine learning are used to respectively establish subjective and objective evaluation models that link the objective vehicle dynamics parameters and occupant subjective confidence. Then, two potential fields are established based on the artificial potential field, reflecting the psychological feeling of drivers on obstacles and road boundaries. Accordingly, a path planning algorithm and a path tracking algorithm are designed respectively based on model predictive control, and the psychological safety boundary and the optimal classifier are used as part of cost functions. Finally, co-simulations of MATLAB/Simulink and CarSim are carried out. The results confirm the effectiveness of the proposed control algorithm, which can avoid obstacles satisfactorily and improve the psychological feeling of occupants effectively.