 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfstratios Gavves
Self-supervised visual learning in the low-data regime: a comparative evaluation
Apr 26, 2024
Self-Supervised Learning (SSL) is a valuable and robust training methodology for contemporary Deep Neural Networks (DNNs), enabling unsupervised pretraining on a `pretext task' that does not require ground-truth labels/annotation. This allows efficient representation learning from massive amounts of unlabeled training data, which in turn leads to increased accuracy in a `downstream task' by exploiting supervised transfer learning. Despite the relatively straightforward conceptualization and applicability of SSL, it is not always feasible to collect and/or to utilize very large pretraining datasets, especially when it comes to real-world application settings. In particular, in cases of specialized and domain-specific application scenarios, it may not be achievable or practical to assemble a relevant image pretraining dataset in the order of millions of instances or it could be computationally infeasible to pretrain at this scale. This motivates an investigation on the effectiveness of common SSL pretext tasks, when the pretraining dataset is of relatively limited/constrained size. In this context, this work introduces a taxonomy of modern visual SSL methods, accompanied by detailed explanations and insights regarding the main categories of approaches, and, subsequently, conducts a thorough comparative experimental evaluation in the low-data regime, targeting to identify: a) what is learnt via low-data SSL pretraining, and b) how do different SSL categories behave in such training scenarios. Interestingly, for domain-specific downstream tasks, in-domain low-data SSL pretraining outperforms the common approach of large-scale pretraining on general datasets. Grounded on the obtained results, valuable insights are highlighted regarding the performance of each category of SSL methods, which in turn suggest straightforward future research directions in the field.
Mechanistic Interpretability for AI Safety -- A Review
Apr 22, 2024Understanding AI systems' inner workings is critical for ensuring value alignment and safety. This review explores mechanistic interpretability: reverse-engineering the computational mechanisms and representations learned by neural networks into human-understandable algorithms and concepts to provide a granular, causal understanding. We establish foundational concepts such as features encoding knowledge within neural activations and hypotheses about their representation and computation. We survey methodologies for causally dissecting model behaviors and assess the relevance of mechanistic interpretability to AI safety. We investigate challenges surrounding scalability, automation, and comprehensive interpretation. We advocate for clarifying concepts, setting standards, and scaling techniques to handle complex models and behaviors and expand to domains such as vision and reinforcement learning. Mechanistic interpretability could help prevent catastrophic outcomes as AI systems become more powerful and inscrutable.
Graph Neural Networks for Learning Equivariant Representations of Neural Networks
Mar 20, 2024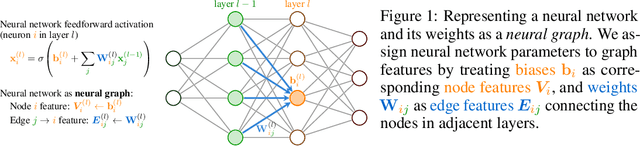
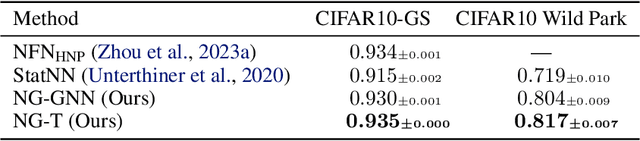
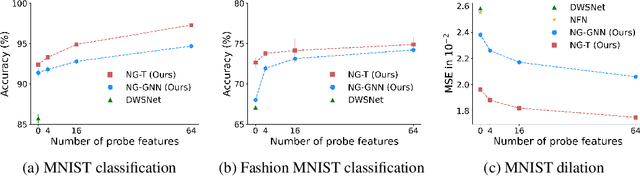

Neural networks that process the parameters of other neural networks find applications in domains as diverse as classifying implicit neural representations, generating neural network weights, and predicting generalization errors. However, existing approaches either overlook the inherent permutation symmetry in the neural network or rely on intricate weight-sharing patterns to achieve equivariance, while ignoring the impact of the network architecture itself. In this work, we propose to represent neural networks as computational graphs of parameters, which allows us to harness powerful graph neural networks and transformers that preserve permutation symmetry. Consequently, our approach enables a single model to encode neural computational graphs with diverse architectures. We showcase the effectiveness of our method on a wide range of tasks, including classification and editing of implicit neural representations, predicting generalization performance, and learning to optimize, while consistently outperforming state-of-the-art methods. The source code is open-sourced at https://github.com/mkofinas/neural-graphs.
Mechanistic Neural Networks for Scientific Machine Learning
Feb 20, 2024This paper presents Mechanistic Neural Networks, a neural network design for machine learning applications in the sciences. It incorporates a new Mechanistic Block in standard architectures to explicitly learn governing differential equations as representations, revealing the underlying dynamics of data and enhancing interpretability and efficiency in data modeling. Central to our approach is a novel Relaxed Linear Programming Solver (NeuRLP) inspired by a technique that reduces solving linear ODEs to solving linear programs. This integrates well with neural networks and surpasses the limitations of traditional ODE solvers enabling scalable GPU parallel processing. Overall, Mechanistic Neural Networks demonstrate their versatility for scientific machine learning applications, adeptly managing tasks from equation discovery to dynamic systems modeling. We prove their comprehensive capabilities in analyzing and interpreting complex scientific data across various applications, showing significant performance against specialized state-of-the-art methods.
Dynamic Prototype Adaptation with Distillation for Few-shot Point Cloud Segmentation
Jan 29, 2024Few-shot point cloud segmentation seeks to generate per-point masks for previously unseen categories, using only a minimal set of annotated point clouds as reference. Existing prototype-based methods rely on support prototypes to guide the segmentation of query point clouds, but they encounter challenges when significant object variations exist between the support prototypes and query features. In this work, we present dynamic prototype adaptation (DPA), which explicitly learns task-specific prototypes for each query point cloud to tackle the object variation problem. DPA achieves the adaptation through prototype rectification, aligning vanilla prototypes from support with the query feature distribution, and prototype-to-query attention, extracting task-specific context from query point clouds. Furthermore, we introduce a prototype distillation regularization term, enabling knowledge transfer between early-stage prototypes and their deeper counterparts during adaption. By iteratively applying these adaptations, we generate task-specific prototypes for accurate mask predictions on query point clouds. Extensive experiments on two popular benchmarks show that DPA surpasses state-of-the-art methods by a significant margin, e.g., 7.43\% and 6.39\% under the 2-way 1-shot setting on S3DIS and ScanNet, respectively. Code is available at https://github.com/jliu4ai/DPA.
How to Train Neural Field Representations: A Comprehensive Study and Benchmark
Dec 16, 2023Neural fields (NeFs) have recently emerged as a versatile method for modeling signals of various modalities, including images, shapes, and scenes. Subsequently, a number of works have explored the use of NeFs as representations for downstream tasks, e.g. classifying an image based on the parameters of a NeF that has been fit to it. However, the impact of the NeF hyperparameters on their quality as downstream representation is scarcely understood and remains largely unexplored. This is in part caused by the large amount of time required to fit datasets of neural fields. In this work, we propose $\verb|fit-a-nef|$, a JAX-based library that leverages parallelization to enable fast optimization of large-scale NeF datasets, resulting in a significant speed-up. With this library, we perform a comprehensive study that investigates the effects of different hyperparameters -- including initialization, network architecture, and optimization strategies -- on fitting NeFs for downstream tasks. Our study provides valuable insights on how to train NeFs and offers guidance for optimizing their effectiveness in downstream applications. Finally, based on the proposed library and our analysis, we propose Neural Field Arena, a benchmark consisting of neural field variants of popular vision datasets, including MNIST, CIFAR, variants of ImageNet, and ShapeNetv2. Our library and the Neural Field Arena will be open-sourced to introduce standardized benchmarking and promote further research on neural fields.
Motion Flow Matching for Human Motion Synthesis and Editing
Dec 14, 2023Human motion synthesis is a fundamental task in computer animation. Recent methods based on diffusion models or GPT structure demonstrate commendable performance but exhibit drawbacks in terms of slow sampling speeds and error accumulation. In this paper, we propose \emph{Motion Flow Matching}, a novel generative model designed for human motion generation featuring efficient sampling and effectiveness in motion editing applications. Our method reduces the sampling complexity from thousand steps in previous diffusion models to just ten steps, while achieving comparable performance in text-to-motion and action-to-motion generation benchmarks. Noticeably, our approach establishes a new state-of-the-art Fr\'echet Inception Distance on the KIT-ML dataset. What is more, we tailor a straightforward motion editing paradigm named \emph{sampling trajectory rewriting} leveraging the ODE-style generative models and apply it to various editing scenarios including motion prediction, motion in-between prediction, motion interpolation, and upper-body editing. Our code will be released.
Data Augmentations in Deep Weight Spaces
Nov 15, 2023Learning in weight spaces, where neural networks process the weights of other deep neural networks, has emerged as a promising research direction with applications in various fields, from analyzing and editing neural fields and implicit neural representations, to network pruning and quantization. Recent works designed architectures for effective learning in that space, which takes into account its unique, permutation-equivariant, structure. Unfortunately, so far these architectures suffer from severe overfitting and were shown to benefit from large datasets. This poses a significant challenge because generating data for this learning setup is laborious and time-consuming since each data sample is a full set of network weights that has to be trained. In this paper, we address this difficulty by investigating data augmentations for weight spaces, a set of techniques that enable generating new data examples on the fly without having to train additional input weight space elements. We first review several recently proposed data augmentation schemes %that were proposed recently and divide them into categories. We then introduce a novel augmentation scheme based on the Mixup method. We evaluate the performance of these techniques on existing benchmarks as well as new benchmarks we generate, which can be valuable for future studies.
Latent Field Discovery In Interacting Dynamical Systems With Neural Fields
Oct 31, 2023Systems of interacting objects often evolve under the influence of field effects that govern their dynamics, yet previous works have abstracted away from such effects, and assume that systems evolve in a vacuum. In this work, we focus on discovering these fields, and infer them from the observed dynamics alone, without directly observing them. We theorize the presence of latent force fields, and propose neural fields to learn them. Since the observed dynamics constitute the net effect of local object interactions and global field effects, recently popularized equivariant networks are inapplicable, as they fail to capture global information. To address this, we propose to disentangle local object interactions -- which are $\mathrm{SE}(n)$ equivariant and depend on relative states -- from external global field effects -- which depend on absolute states. We model interactions with equivariant graph networks, and combine them with neural fields in a novel graph network that integrates field forces. Our experiments show that we can accurately discover the underlying fields in charged particles settings, traffic scenes, and gravitational n-body problems, and effectively use them to learn the system and forecast future trajectories.
Time Does Tell: Self-Supervised Time-Tuning of Dense Image Representations
Aug 22, 2023


Spatially dense self-supervised learning is a rapidly growing problem domain with promising applications for unsupervised segmentation and pretraining for dense downstream tasks. Despite the abundance of temporal data in the form of videos, this information-rich source has been largely overlooked. Our paper aims to address this gap by proposing a novel approach that incorporates temporal consistency in dense self-supervised learning. While methods designed solely for images face difficulties in achieving even the same performance on videos, our method improves not only the representation quality for videos-but also images. Our approach, which we call time-tuning, starts from image-pretrained models and fine-tunes them with a novel self-supervised temporal-alignment clustering loss on unlabeled videos. This effectively facilitates the transfer of high-level information from videos to image representations. Time-tuning improves the state-of-the-art by 8-10% for unsupervised semantic segmentation on videos and matches it for images. We believe this method paves the way for further self-supervised scaling by leveraging the abundant availability of videos. The implementation can be found here : https://github.com/SMSD75/Timetuning