 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeorgios Tziafas
Language-guided Robot Grasping: CLIP-based Referring Grasp Synthesis in Clutter
Nov 09, 2023
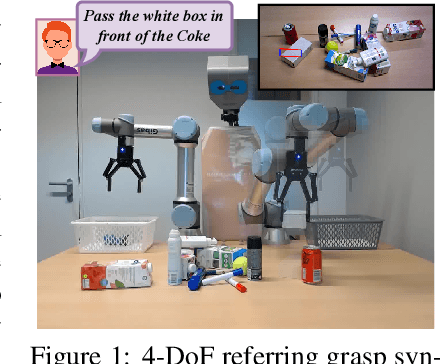
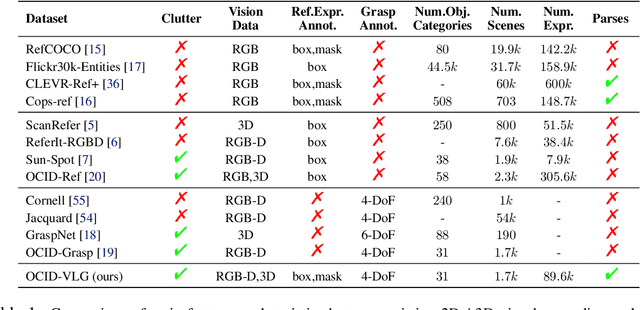
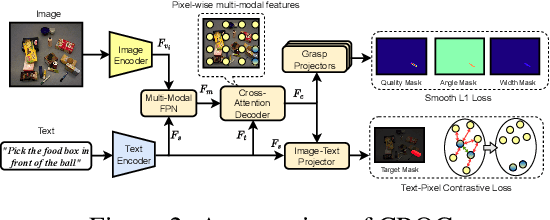
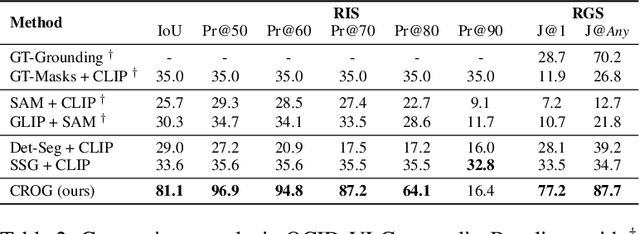
Robots operating in human-centric environments require the integration of visual grounding and grasping capabilities to effectively manipulate objects based on user instructions. This work focuses on the task of referring grasp synthesis, which predicts a grasp pose for an object referred through natural language in cluttered scenes. Existing approaches often employ multi-stage pipelines that first segment the referred object and then propose a suitable grasp, and are evaluated in private datasets or simulators that do not capture the complexity of natural indoor scenes. To address these limitations, we develop a challenging benchmark based on cluttered indoor scenes from OCID dataset, for which we generate referring expressions and connect them with 4-DoF grasp poses. Further, we propose a novel end-to-end model (CROG) that leverages the visual grounding capabilities of CLIP to learn grasp synthesis directly from image-text pairs. Our results show that vanilla integration of CLIP with pretrained models transfers poorly in our challenging benchmark, while CROG achieves significant improvements both in terms of grounding and grasping. Extensive robot experiments in both simulation and hardware demonstrate the effectiveness of our approach in challenging interactive object grasping scenarios that include clutter.
A Hybrid Compositional Reasoning Approach for Interactive Robot Manipulation
Oct 03, 2022



In this paper we present a neuro-symbolic (hybrid) compositional reasoning model for coupling language-guided visual reasoning with robot manipulation. A non-expert human user can prompt the robot agent using natural language, providing either a referring expression (REC), a question (VQA) or a grasp action instruction. The model can tackle all cases in a task-agnostic fashion through the utilization of a shared library of primitive skills. Each primitive handles an independent sub-task, such as reasoning about visual attributes, spatial relation comprehension, logic and enumeration, as well as arm control. A language parser maps the input query to an executable program composed of such primitives depending on the context. While some primitives are purely symbolic operations (e.g. counting), others are trainable neural functions (e.g. grounding words to images), therefore marrying the interpretability and systematic generalization benefits of discrete symbolic approaches with the scalability and representational power of deep networks. We generate a synthetic dataset of tabletop scenes to train our approach and perform several evaluation experiments for VQA in the synthetic and a real RGB-D dataset. Results show that the proposed method achieves very high accuracy while being transferable to novel content with few-shot visual fine-tuning. Finally, we integrate our method with a robot framework and demonstrate how it can serve as an interpretable solution for an interactive object picking task, both in simulation and with a real robot.
A Strong Transfer Baseline for RGB-D Fusion in Vision Transformers
Oct 03, 2022



The Vision Transformer (ViT) architecture has recently established its place in the computer vision literature, with multiple architectures for recognition of image data or other visual modalities. However, training ViTs for RGB-D object recognition remains an understudied topic, viewed in recent literature only through the lens of multi-task pretraining in multiple modalities. Such approaches are often computationally intensive and have not yet been applied for challenging object-level classification tasks. In this work, we propose a simple yet strong recipe for transferring pretrained ViTs in RGB-D domains for single-view 3D object recognition, focusing on fusing RGB and depth representations encoded jointly by the ViT. Compared to previous works in multimodal Transformers, the key challenge here is to use the atested flexibility of ViTs to capture cross-modal interactions at the downstream and not the pretraining stage. We explore which depth representation is better in terms of resulting accuracy and compare two methods for injecting RGB-D fusion within the ViT architecture (i.e., early vs. late fusion). Our results in the Washington RGB-D Objects dataset demonstrates that in such RGB $\rightarrow$ RGB-D scenarios, late fusion techniques work better than most popularly employed early fusion. With our transfer baseline, adapted ViTs score up to 95.1\% top-1 accuracy in Washington, achieving new state-of-the-art results in this benchmark. We additionally evaluate our approach with an open-ended lifelong learning protocol, where we show that our adapted RGB-D encoder leads to features that outperform unimodal encoders, even without explicit fine-tuning. We further integrate our method with a robot framework and demonstrate how it can serve as a perception utility in an interactive robot learning scenario, both in simulation and with a real robot.
Sim-To-Real Transfer of Visual Grounding for Human-Aided Ambiguity Resolution
May 24, 2022



Service robots should be able to interact naturally with non-expert human users, not only to help them in various tasks but also to receive guidance in order to resolve ambiguities that might be present in the instruction. We consider the task of visual grounding, where the agent segments an object from a crowded scene given a natural language description. Modern holistic approaches to visual grounding usually ignore language structure and struggle to cover generic domains, therefore relying heavily on large datasets. Additionally, their transfer performance in RGB-D datasets suffers due to high visual discrepancy between the benchmark and the target domains. Modular approaches marry learning with domain modeling and exploit the compositional nature of language to decouple visual representation from language parsing, but either rely on external parsers or are trained in an end-to-end fashion due to the lack of strong supervision. In this work, we seek to tackle these limitations by introducing a fully decoupled modular framework for compositional visual grounding of entities, attributes, and spatial relations. We exploit rich scene graph annotations generated in a synthetic domain and train each module independently. Our approach is evaluated both in simulation and in two real RGB-D scene datasets. Experimental results show that the decoupled nature of our framework allows for easy integration with domain adaptation approaches for Sim-To-Real visual recognition, offering a data-efficient, robust, and interpretable solution to visual grounding in robotic applications.