 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuangzhi Tang
NeuroBench: Advancing Neuromorphic Computing through Collaborative, Fair and Representative Benchmarking
Apr 15, 2023
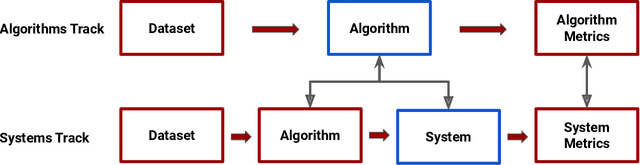
The field of neuromorphic computing holds great promise in terms of advancing computing efficiency and capabilities by following brain-inspired principles. However, the rich diversity of techniques employed in neuromorphic research has resulted in a lack of clear standards for benchmarking, hindering effective evaluation of the advantages and strengths of neuromorphic methods compared to traditional deep-learning-based methods. This paper presents a collaborative effort, bringing together members from academia and the industry, to define benchmarks for neuromorphic computing: NeuroBench. The goals of NeuroBench are to be a collaborative, fair, and representative benchmark suite developed by the community, for the community. In this paper, we discuss the challenges associated with benchmarking neuromorphic solutions, and outline the key features of NeuroBench. We believe that NeuroBench will be a significant step towards defining standards that can unify the goals of neuromorphic computing and drive its technological progress. Please visit neurobench.ai for the latest updates on the benchmark tasks and metrics.
Open the box of digital neuromorphic processor: Towards effective algorithm-hardware co-design
Mar 27, 2023



Sparse and event-driven spiking neural network (SNN) algorithms are the ideal candidate solution for energy-efficient edge computing. Yet, with the growing complexity of SNN algorithms, it isn't easy to properly benchmark and optimize their computational cost without hardware in the loop. Although digital neuromorphic processors have been widely adopted to benchmark SNN algorithms, their black-box nature is problematic for algorithm-hardware co-optimization. In this work, we open the black box of the digital neuromorphic processor for algorithm designers by presenting the neuron processing instruction set and detailed energy consumption of the SENeCA neuromorphic architecture. For convenient benchmarking and optimization, we provide the energy cost of the essential neuromorphic components in SENeCA, including neuron models and learning rules. Moreover, we exploit the SENeCA's hierarchical memory and exhibit an advantage over existing neuromorphic processors. We show the energy efficiency of SNN algorithms for video processing and online learning, and demonstrate the potential of our work for optimizing algorithm designs. Overall, we present a practical approach to enable algorithm designers to accurately benchmark SNN algorithms and pave the way towards effective algorithm-hardware co-design.
BioGrad: Biologically Plausible Gradient-Based Learning for Spiking Neural Networks
Oct 27, 2021



Spiking neural networks (SNN) are delivering energy-efficient, massively parallel, and low-latency solutions to AI problems, facilitated by the emerging neuromorphic chips. To harness these computational benefits, SNN need to be trained by learning algorithms that adhere to brain-inspired neuromorphic principles, namely event-based, local, and online computations. Yet, the state-of-the-art SNN training algorithms are based on backprop that does not follow the above principles. Due to its limited biological plausibility, the application of backprop to SNN requires non-local feedback pathways for transmitting continuous-valued errors, and relies on gradients from future timesteps. The introduction of biologically plausible modifications to backprop has helped overcome several of its limitations, but limits the degree to which backprop is approximated, which hinders its performance. We propose a biologically plausible gradient-based learning algorithm for SNN that is functionally equivalent to backprop, while adhering to all three neuromorphic principles. We introduced multi-compartment spiking neurons with local eligibility traces to compute the gradients required for learning, and a periodic "sleep" phase to further improve the approximation to backprop during which a local Hebbian rule aligns the feedback and feedforward weights. Our method achieved the same level of performance as backprop with multi-layer fully connected SNN on MNIST (98.13%) and the event-based N-MNIST (97.59%) datasets. We deployed our learning algorithm on Intel's Loihi to train a 1-hidden-layer network for MNIST, and obtained 93.32% test accuracy while consuming 400 times less energy per training sample than BioGrad on GPU. Our work shows that optimal learning is feasible in neuromorphic computing, and further pursuing its biological plausibility can better capture the benefits of this emerging computing paradigm.
Deep Reinforcement Learning with Population-Coded Spiking Neural Network for Continuous Control
Oct 19, 2020



The energy-efficient control of mobile robots is crucial as the complexity of their real-world applications increasingly involves high-dimensional observation and action spaces, which cannot be offset by limited on-board resources. An emerging non-Von Neumann model of intelligence, where spiking neural networks (SNNs) are run on neuromorphic processors, is regarded as an energy-efficient and robust alternative to the state-of-the-art real-time robotic controllers for low dimensional control tasks. The challenge now for this new computing paradigm is to scale so that it can keep up with real-world tasks. To do so, SNNs need to overcome the inherent limitations of their training, namely the limited ability of their spiking neurons to represent information and the lack of effective learning algorithms. Here, we propose a population-coded spiking actor network (PopSAN) trained in conjunction with a deep critic network using deep reinforcement learning (DRL). The population coding scheme dramatically increased the representation capacity of the network and the hybrid learning combined the training advantages of deep networks with the energy-efficient inference of spiking networks. To show the general applicability of our approach, we integrated it with a spectrum of both on-policy and off-policy DRL algorithms. We deployed the trained PopSAN on Intel's Loihi neuromorphic chip and benchmarked our method against the mainstream DRL algorithms for continuous control. To allow for a fair comparison among all methods, we validated them on OpenAI gym tasks. Our Loihi-run PopSAN consumed 140 times less energy per inference when compared against the deep actor network on Jetson TX2, and had the same level of performance. Our results support the efficiency of neuromorphic controllers and suggest our hybrid RL as an alternative to deep learning, when both energy-efficiency and robustness are important.
Reinforcement co-Learning of Deep and Spiking Neural Networks for Energy-Efficient Mapless Navigation with Neuromorphic Hardware
Mar 02, 2020



Energy-efficient mapless navigation is crucial for mobile robots as they explore unknown environments with limited on-board resources. Although the recent deep reinforcement learning (DRL) approaches have been successfully applied to navigation, their high energy consumption limits their use in many robotic applications. Here, we propose a neuromorphic approach that combines the energy-efficiency of spiking neural networks with the optimality of DRL to learn control policies for mapless navigation. Our hybrid framework, Spiking deep deterministic policy gradient (SDDPG), consists of a spiking actor network (SAN) and a deep critic network, where the two networks were trained jointly using gradient descent. The trained SAN was deployed on Intel's Loihi neuromorphic processor. The co-learning enabled synergistic information exchange between the two networks, allowing them to overcome each other's limitations through a shared representation learning. When validated on both simulated and real-world complex environments, our method on Loihi not only consumed 75 times less energy per inference as compared to DDPG on Jetson TX2, but also had a higher rate of successfully navigating to the goal which ranged by 1\% to 4.2\%, depending on the forward-propagation timestep size. These results reinforce our ongoing effort to design brain-inspired algorithms for controlling autonomous robots with neuromorphic hardware.
Introducing Astrocytes on a Neuromorphic Processor: Synchronization, Local Plasticity and Edge of Chaos
Jul 02, 2019



While there is still a lot to learn about astrocytes and their neuromodulatory role associated with their spatial and temporal integration of synaptic activity, the introduction of an additional to neurons processing unit into neuromorphic hardware is timely, facilitating their computational exploration in basic science questions and their exploitation in real-world applications. Here, we present an astrocytic module that enables the development of a spiking Neuronal-Astrocytic Network (SNAN) into Intel's Loihi neuromorphic chip. The basis of our module is an end-to-end biophysically plausible compartmental model of an astrocyte that simulates how intracellular activity may encode synaptic activity in space and time. To demonstrate the functional role of astrocytes in SNANs, we describe how an astrocyte may sense and induce activity-dependent neuronal synchronization, can endow single-shot learning capabilities in spike-time-dependent plasticity (STDP), and sense the transition between ordered and chaotic activity in the neuronal component of an SNAN. Our astrocytic module may serve as a natural extension for neuromorphic hardware by mimicking the distinct computational roles of its biological counterpart.
Spiking Neural Network on Neuromorphic Hardware for Energy-Efficient Unidimensional SLAM
Mar 06, 2019



Energy-efficient simultaneous localization and mapping (SLAM) is crucial for mobile robots exploring unknown environments. The mammalian brain solves SLAM via a network of specialized neurons, exhibiting asynchronous computations and event-based communications, with very low energy consumption. We propose a brain-inspired spiking neural network (SNN) architecture that solves the unidimensional SLAM by introducing spike-based reference frame transformation, visual likelihood computation, and Bayesian inference. Our proposed SNN is seamlessly integrated into Intel's Loihi neuromorphic processor, a non-Von Neumann hardware that mimics the brain's computing paradigms. We performed comparative analyses for accuracy and energy-efficiency between our method and the GMapping algorithm, which is widely used in small environments. Our Loihi-based SNN architecture consumes 100 times less energy than GMapping run on a CPU while having comparable accuracy in head direction localization and map-generation. These results pave the way for extending our approach towards an energy-efficient SLAM that is applicable to Loihi-controlled mobile robots.
Gridbot: An autonomous robot controlled by a Spiking Neural Network mimicking the brain's navigational system
Jul 05, 2018


It is true that the "best" neural network is not necessarily the one with the most "brain-like" behavior. Understanding biological intelligence, however, is a fundamental goal for several distinct disciplines. Translating our understanding of intelligence to machines is a fundamental problem in robotics. Propelled by new advancements in Neuroscience, we developed a spiking neural network (SNN) that draws from mounting experimental evidence that a number of individual neurons is associated with spatial navigation. By following the brain's structure, our model assumes no initial all-to-all connectivity, which could inhibit its translation to a neuromorphic hardware, and learns an uncharted territory by mapping its identified components into a limited number of neural representations, through spike-timing dependent plasticity (STDP). In our ongoing effort to employ a bioinspired SNN-controlled robot to real-world spatial mapping applications, we demonstrate here how an SNN may robustly control an autonomous robot in mapping and exploring an unknown environment, while compensating for its own intrinsic hardware imperfections, such as partial or total loss of visual input.