 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHangning Zhou
SparseAD: Sparse Query-Centric Paradigm for Efficient End-to-End Autonomous Driving
Apr 10, 2024
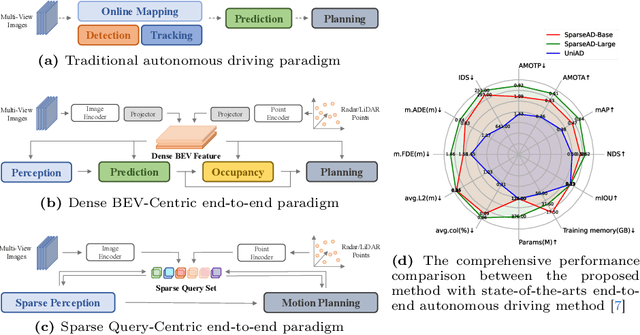

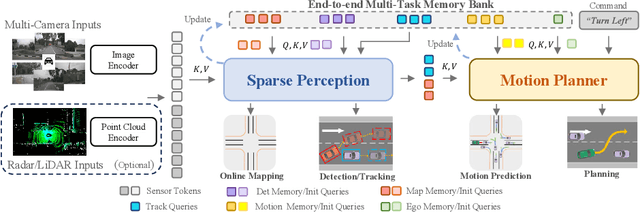
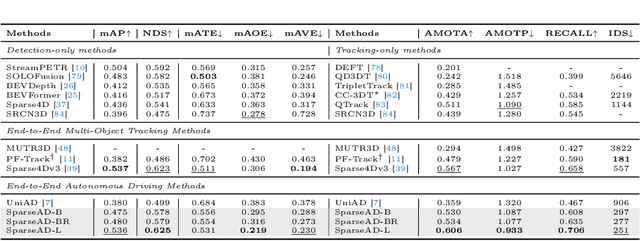
End-to-End paradigms use a unified framework to implement multi-tasks in an autonomous driving system. Despite simplicity and clarity, the performance of end-to-end autonomous driving methods on sub-tasks is still far behind the single-task methods. Meanwhile, the widely used dense BEV features in previous end-to-end methods make it costly to extend to more modalities or tasks. In this paper, we propose a Sparse query-centric paradigm for end-to-end Autonomous Driving (SparseAD), where the sparse queries completely represent the whole driving scenario across space, time and tasks without any dense BEV representation. Concretely, we design a unified sparse architecture for perception tasks including detection, tracking, and online mapping. Moreover, we revisit motion prediction and planning, and devise a more justifiable motion planner framework. On the challenging nuScenes dataset, SparseAD achieves SOTA full-task performance among end-to-end methods and significantly narrows the performance gap between end-to-end paradigms and single-task methods. Codes will be released soon.
MacFormer: Map-Agent Coupled Transformer for Real-time and Robust Trajectory Prediction
Aug 31, 2023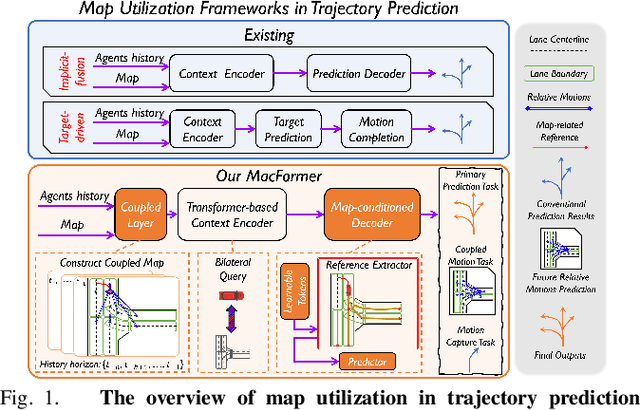
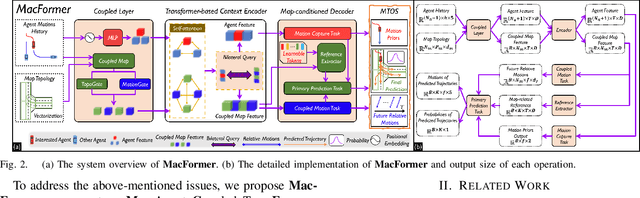

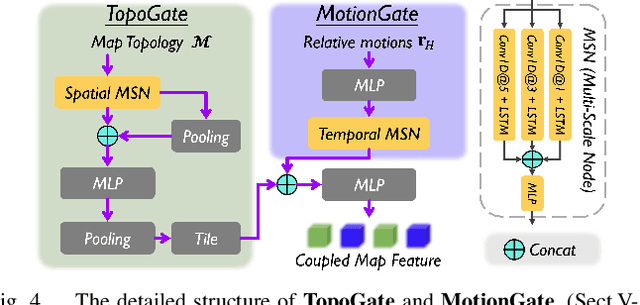
Predicting the future behavior of agents is a fundamental task in autonomous vehicle domains. Accurate prediction relies on comprehending the surrounding map, which significantly regularizes agent behaviors. However, existing methods have limitations in exploiting the map and exhibit a strong dependence on historical trajectories, which yield unsatisfactory prediction performance and robustness. Additionally, their heavy network architectures impede real-time applications. To tackle these problems, we propose Map-Agent Coupled Transformer (MacFormer) for real-time and robust trajectory prediction. Our framework explicitly incorporates map constraints into the network via two carefully designed modules named coupled map and reference extractor. A novel multi-task optimization strategy (MTOS) is presented to enhance learning of topology and rule constraints. We also devise bilateral query scheme in context fusion for a more efficient and lightweight network. We evaluated our approach on Argoverse 1, Argoverse 2, and nuScenes real-world benchmarks, where it all achieved state-of-the-art performance with the lowest inference latency and smallest model size. Experiments also demonstrate that our framework is resilient to imperfect tracklet inputs. Furthermore, we show that by combining with our proposed strategies, classical models outperform their baselines, further validating the versatility of our framework.
A Rotation Meanout Network with Invariance for Dermoscopy Image Classification and Retrieval
Aug 01, 2022
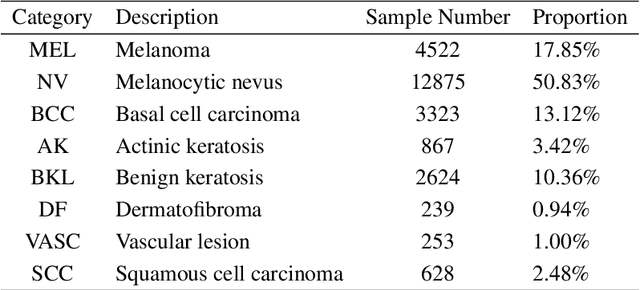


The computer-aided diagnosis (CAD) system can provide a reference basis for the clinical diagnosis of skin diseases. Convolutional neural networks (CNNs) can not only extract visual elements such as colors and shapes but also semantic features. As such they have made great improvements in many tasks of dermoscopy images. The imaging of dermoscopy has no main direction, indicating that there are a large number of skin lesion target rotations in the datasets. However, CNNs lack anti-rotation ability, which is bound to affect the feature extraction ability of CNNs. We propose a rotation meanout (RM) network to extract rotation invariance features from dermoscopy images. In RM, each set of rotated feature maps corresponds to a set of weight-sharing convolution outputs and they are fused using meanout operation to obtain the final feature maps. Through theoretical derivation, the proposed RM network is rotation-equivariant and can extract rotation-invariant features when being followed by the global average pooling (GAP) operation. The extracted rotation-invariant features can better represent the original data in classification and retrieval tasks for dermoscopy images. The proposed RM is a general operation, which does not change the network structure or increase any parameter, and can be flexibly embedded in any part of CNNs. Extensive experiments are conducted on a dermoscopy image dataset. The results show our method outperforms other anti-rotation methods and achieves great improvements in dermoscopy image classification and retrieval tasks, indicating the potential of rotation invariance in the field of dermoscopy images.
TENET: Transformer Encoding Network for Effective Temporal Flow on Motion Prediction
Jun 30, 2022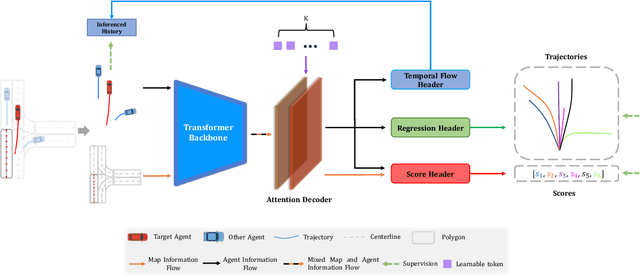


This technical report presents an effective method for motion prediction in autonomous driving. We develop a Transformer-based method for input encoding and trajectory prediction. Besides, we propose the Temporal Flow Header to enhance the trajectory encoding. In the end, an efficient K-means ensemble method is used. Using our Transformer network and ensemble method, we win the first place of Argoverse 2 Motion Forecasting Challenge with the state-of-the-art brier-minFDE score of 1.90.