 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoão Sacramento
Discovering modular solutions that generalize compositionally
Dec 22, 2023
Many complex tasks and environments can be decomposed into simpler, independent parts. Discovering such underlying compositional structure has the potential to expedite adaptation and enable compositional generalization. Despite progress, our most powerful systems struggle to compose flexibly. While most of these systems are monolithic, modularity promises to allow capturing the compositional nature of many tasks. However, it is unclear under which circumstances modular systems discover this hidden compositional structure. To shed light on this question, we study a teacher-student setting with a modular teacher where we have full control over the composition of ground truth modules. This allows us to relate the problem of compositional generalization to that of identification of the underlying modules. We show theoretically that identification up to linear transformation purely from demonstrations is possible in hypernetworks without having to learn an exponential number of module combinations. While our theory assumes the infinite data limit, in an extensive empirical study we demonstrate how meta-learning from finite data can discover modular solutions that generalize compositionally in modular but not monolithic architectures. We further show that our insights translate outside the teacher-student setting and demonstrate that in tasks with compositional preferences and tasks with compositional goals hypernetworks can discover modular policies that compositionally generalize.
Uncovering mesa-optimization algorithms in Transformers
Sep 11, 2023Transformers have become the dominant model in deep learning, but the reason for their superior performance is poorly understood. Here, we hypothesize that the strong performance of Transformers stems from an architectural bias towards mesa-optimization, a learned process running within the forward pass of a model consisting of the following two steps: (i) the construction of an internal learning objective, and (ii) its corresponding solution found through optimization. To test this hypothesis, we reverse-engineer a series of autoregressive Transformers trained on simple sequence modeling tasks, uncovering underlying gradient-based mesa-optimization algorithms driving the generation of predictions. Moreover, we show that the learned forward-pass optimization algorithm can be immediately repurposed to solve supervised few-shot tasks, suggesting that mesa-optimization might underlie the in-context learning capabilities of large language models. Finally, we propose a novel self-attention layer, the mesa-layer, that explicitly and efficiently solves optimization problems specified in context. We find that this layer can lead to improved performance in synthetic and preliminary language modeling experiments, adding weight to our hypothesis that mesa-optimization is an important operation hidden within the weights of trained Transformers.
Gated recurrent neural networks discover attention
Sep 04, 2023



Recent architectural developments have enabled recurrent neural networks (RNNs) to reach and even surpass the performance of Transformers on certain sequence modeling tasks. These modern RNNs feature a prominent design pattern: linear recurrent layers interconnected by feedforward paths with multiplicative gating. Here, we show how RNNs equipped with these two design elements can exactly implement (linear) self-attention, the main building block of Transformers. By reverse-engineering a set of trained RNNs, we find that gradient descent in practice discovers our construction. In particular, we examine RNNs trained to solve simple in-context learning tasks on which Transformers are known to excel and find that gradient descent instills in our RNNs the same attention-based in-context learning algorithm used by Transformers. Our findings highlight the importance of multiplicative interactions in neural networks and suggest that certain RNNs might be unexpectedly implementing attention under the hood.
Online learning of long-range dependencies
May 25, 2023



Online learning holds the promise of enabling efficient long-term credit assignment in recurrent neural networks. However, current algorithms fall short of offline backpropagation by either not being scalable or failing to learn long-range dependencies. Here we present a high-performance online learning algorithm that merely doubles the memory and computational requirements of a single inference pass. We achieve this by leveraging independent recurrent modules in multi-layer networks, an architectural motif that has recently been shown to be particularly powerful. Experiments on synthetic memory problems and on the challenging long-range arena benchmark suite reveal that our algorithm performs competitively, establishing a new standard for what can be achieved through online learning. This ability to learn long-range dependencies offers a new perspective on learning in the brain and opens a promising avenue in neuromorphic computing.
Transformers learn in-context by gradient descent
Dec 15, 2022
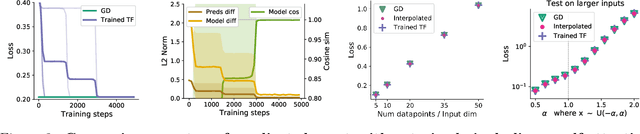
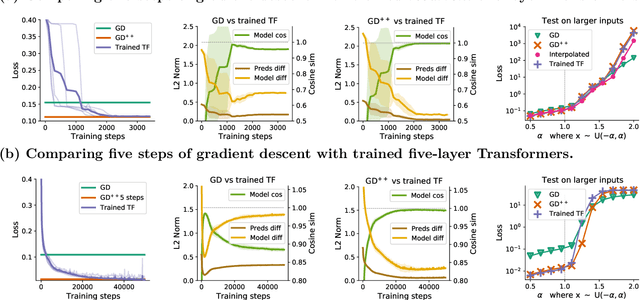
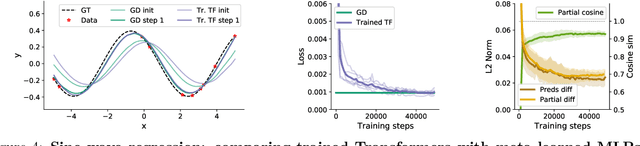
Transformers have become the state-of-the-art neural network architecture across numerous domains of machine learning. This is partly due to their celebrated ability to transfer and to learn in-context based on few examples. Nevertheless, the mechanisms by which Transformers become in-context learners are not well understood and remain mostly an intuition. Here, we argue that training Transformers on auto-regressive tasks can be closely related to well-known gradient-based meta-learning formulations. We start by providing a simple weight construction that shows the equivalence of data transformations induced by 1) a single linear self-attention layer and by 2) gradient-descent (GD) on a regression loss. Motivated by that construction, we show empirically that when training self-attention-only Transformers on simple regression tasks either the models learned by GD and Transformers show great similarity or, remarkably, the weights found by optimization match the construction. Thus we show how trained Transformers implement gradient descent in their forward pass. This allows us, at least in the domain of regression problems, to mechanistically understand the inner workings of optimized Transformers that learn in-context. Furthermore, we identify how Transformers surpass plain gradient descent by an iterative curvature correction and learn linear models on deep data representations to solve non-linear regression tasks. Finally, we discuss intriguing parallels to a mechanism identified to be crucial for in-context learning termed induction-head (Olsson et al., 2022) and show how it could be understood as a specific case of in-context learning by gradient descent learning within Transformers.
The least-control principle for learning at equilibrium
Jul 04, 2022



Equilibrium systems are a powerful way to express neural computations. As special cases, they include models of great current interest in both neuroscience and machine learning, such as equilibrium recurrent neural networks, deep equilibrium models, or meta-learning. Here, we present a new principle for learning such systems with a temporally- and spatially-local rule. Our principle casts learning as a least-control problem, where we first introduce an optimal controller to lead the system towards a solution state, and then define learning as reducing the amount of control needed to reach such a state. We show that incorporating learning signals within a dynamics as an optimal control enables transmitting credit assignment information in previously unknown ways, avoids storing intermediate states in memory, and does not rely on infinitesimal learning signals. In practice, our principle leads to strong performance matching that of leading gradient-based learning methods when applied to an array of problems involving recurrent neural networks and meta-learning. Our results shed light on how the brain might learn and offer new ways of approaching a broad class of machine learning problems.
Beyond backpropagation: implicit gradients for bilevel optimization
May 06, 2022


This paper reviews gradient-based techniques to solve bilevel optimization problems. Bilevel optimization is a general way to frame the learning of systems that are implicitly defined through a quantity that they minimize. This characterization can be applied to neural networks, optimizers, algorithmic solvers and even physical systems, and allows for greater modeling flexibility compared to an explicit definition of such systems. Here we focus on gradient-based approaches that solve such problems. We distinguish them in two categories: those rooted in implicit differentiation, and those that leverage the equilibrium propagation theorem. We present the mathematical foundations that are behind such methods, introduce the gradient-estimation algorithms in detail and compare the competitive advantages of the different approaches.
Minimizing Control for Credit Assignment with Strong Feedback
Apr 14, 2022



The success of deep learning attracted interest in whether the brain learns hierarchical representations using gradient-based learning. However, current biologically plausible methods for gradient-based credit assignment in deep neural networks need infinitesimally small feedback signals, which is problematic in biologically realistic noisy environments and at odds with experimental evidence in neuroscience showing that top-down feedback can significantly influence neural activity. Building upon deep feedback control (DFC), a recently proposed credit assignment method, we combine strong feedback influences on neural activity with gradient-based learning and show that this naturally leads to a novel view on neural network optimization. Instead of gradually changing the network weights towards configurations with low output loss, weight updates gradually minimize the amount of feedback required from a controller that drives the network to the supervised output label. Moreover, we show that the use of strong feedback in DFC allows learning forward and feedback connections simultaneously, using a learning rule fully local in space and time. We complement our theoretical results with experiments on standard computer-vision benchmarks, showing competitive performance to backpropagation as well as robustness to noise. Overall, our work presents a fundamentally novel view of learning as control minimization, while sidestepping biologically unrealistic assumptions.
Learning where to learn: Gradient sparsity in meta and continual learning
Oct 27, 2021



Finding neural network weights that generalize well from small datasets is difficult. A promising approach is to learn a weight initialization such that a small number of weight changes results in low generalization error. We show that this form of meta-learning can be improved by letting the learning algorithm decide which weights to change, i.e., by learning where to learn. We find that patterned sparsity emerges from this process, with the pattern of sparsity varying on a problem-by-problem basis. This selective sparsity results in better generalization and less interference in a range of few-shot and continual learning problems. Moreover, we find that sparse learning also emerges in a more expressive model where learning rates are meta-learned. Our results shed light on an ongoing debate on whether meta-learning can discover adaptable features and suggest that learning by sparse gradient descent is a powerful inductive bias for meta-learning systems.
Credit Assignment in Neural Networks through Deep Feedback Control
Jun 15, 2021



The success of deep learning sparked interest in whether the brain learns by using similar techniques for assigning credit to each synaptic weight for its contribution to the network output. However, the majority of current attempts at biologically-plausible learning methods are either non-local in time, require highly specific connectivity motives, or have no clear link to any known mathematical optimization method. Here, we introduce Deep Feedback Control (DFC), a new learning method that uses a feedback controller to drive a deep neural network to match a desired output target and whose control signal can be used for credit assignment. The resulting learning rule is fully local in space and time and approximates Gauss-Newton optimization for a wide range of feedback connectivity patterns. To further underline its biological plausibility, we relate DFC to a multi-compartment model of cortical pyramidal neurons with a local voltage-dependent synaptic plasticity rule, consistent with recent theories of dendritic processing. By combining dynamical system theory with mathematical optimization theory, we provide a strong theoretical foundation for DFC that we corroborate with detailed results on toy experiments and standard computer-vision benchmarks.