 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJohn T. Wen
Fast and Accurate Relative Motion Tracking for Two Industrial Robots
Apr 10, 2024
Industrial robotic applications such as spraying, welding, and additive manufacturing frequently require fast, accurate, and uniform motion along a 3D spatial curve. To increase process throughput, some manufacturers propose a dual-robot setup to overcome the speed limitation of a single robot. Industrial robot motion is programmed through waypoints connected by motion primitives (Cartesian linear and circular paths and linear joint paths at constant Cartesian speed). The actual robot motion is affected by the blending between these motion primitives and the pose of the robot (an outstretched/close to singularity pose tends to have larger path-tracking errors). Choosing the waypoints and the speed along each motion segment to achieve the performance requirement is challenging. At present, there is no automated solution, and laborious manual tuning by robot experts is needed to approach the desired performance. In this paper, we present a systematic three-step approach to designing and programming a dual-robot system to optimize system performance. The first step is to select the relative placement between the two robots based on the specified relative motion path. The second step is to select the relative waypoints and the motion primitives. The final step is to update the waypoints iteratively based on the actual relative motion. Waypoint iteration is first executed in simulation and then completed using the actual robots. For performance measures, we use the mean path speed subject to the relative position and orientation constraints and the path speed uniformity constraint. We have demonstrated the effectiveness of this method with ABB and FANUC robots on two challenging test curves. The performance improvement over the current industrial practice baseline is over 300%. Compared to the optimized single-arm case that we have previously reported, the improvement is over 14%.
Redundancy parameterization and inverse kinematics of 7-DOF revolute manipulators
Jul 24, 2023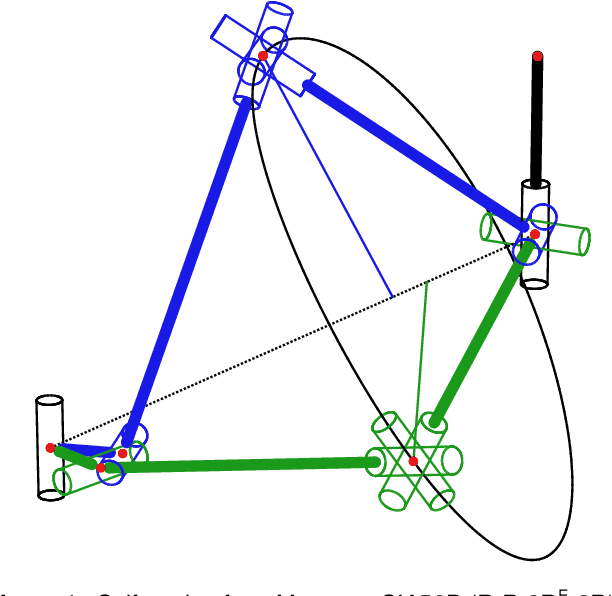
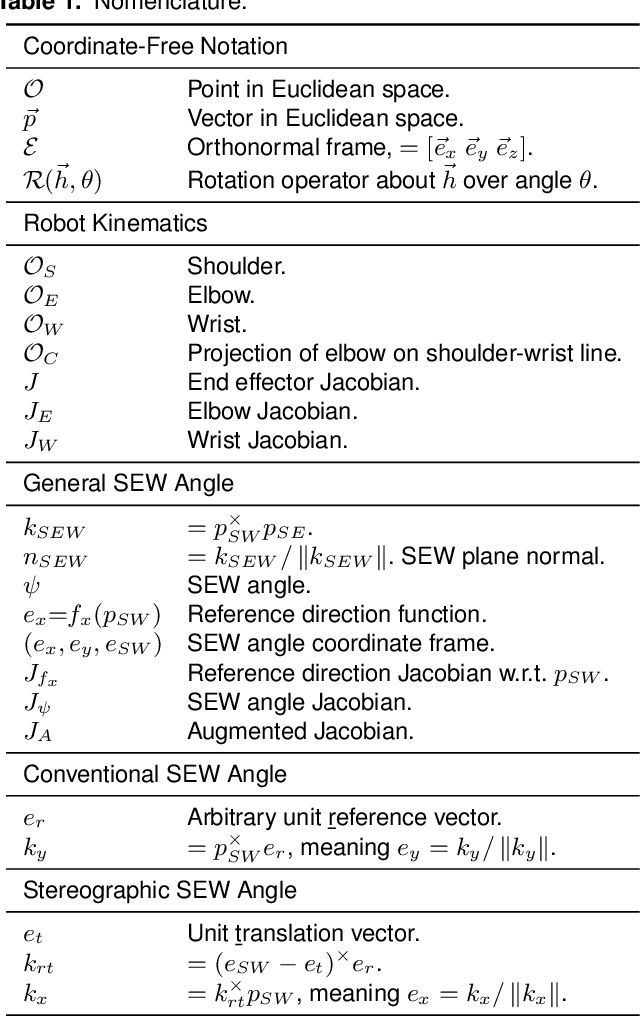
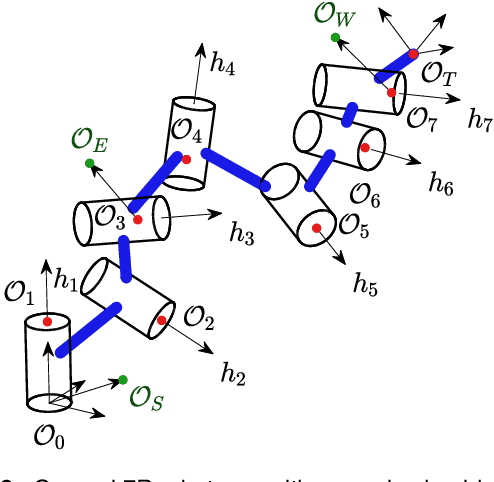

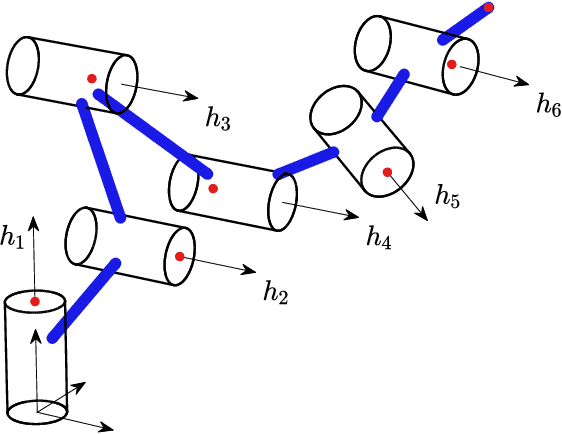
Seven degree-of-freedom (DOF) robot arms have one redundant DOF which does not change the translational or rotational motion of the end effector. The redundant DOF offers greater manipulability of the arm configuration to avoid obstacles and steer away from singularities, but it must be parameterized to fully specify the joint angles for a given end effector pose. For 7-DOF revolute (7R) manipulators, we introduce a new concept of generalized shoulder-elbow-wrist (SEW) angle, a generalization of the conventional SEW angle but with an arbitrary choice of the reference direction function. The SEW angle is easy for human operators to visualize as a rotation of the elbow about the line from the shoulder to the wrist and has been used in the teleoperation of space robot arms. Since the conventional SEW angle formulation is prone to singularities, we introduce a special choice of the reference direction function called the stereographic SEW angle which has a singularity in only one direction in the workspace. We prove that such a singularity is unavoidable for any parameterization. We also include expressions for the SEW angle Jacobian along with singularity analysis. Finally, we provide inverse kinematics solutions for most known 7R manipulators using the general SEW angle and the subproblem decomposition method. These solutions are often closed-form but may sometimes involve a 1D or 2D search. Inverse kinematics solutions, examples, and evaluations are available in a publicly accessible repository.
High-Speed High-Accuracy Spatial Curve Tracking Using Motion Primitives in Industrial Robots
Jan 06, 2023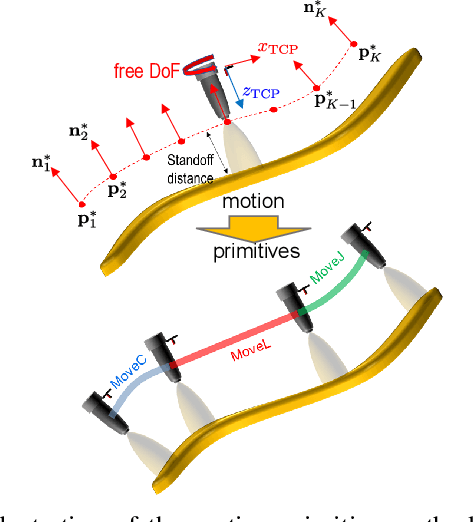
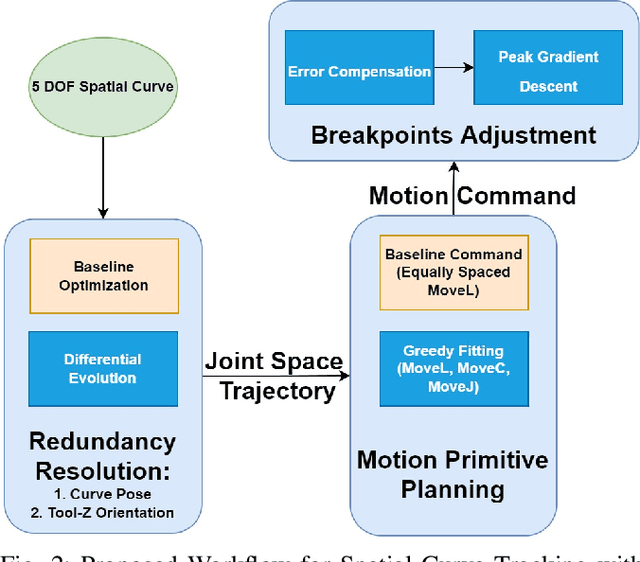
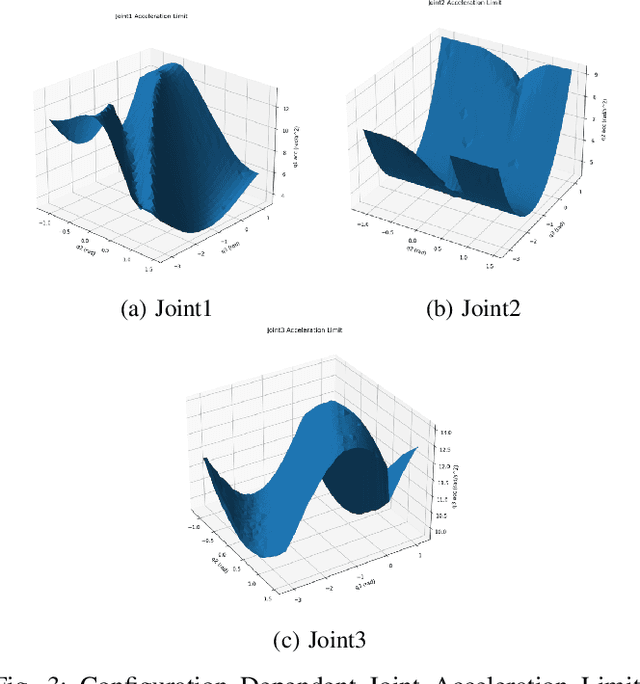
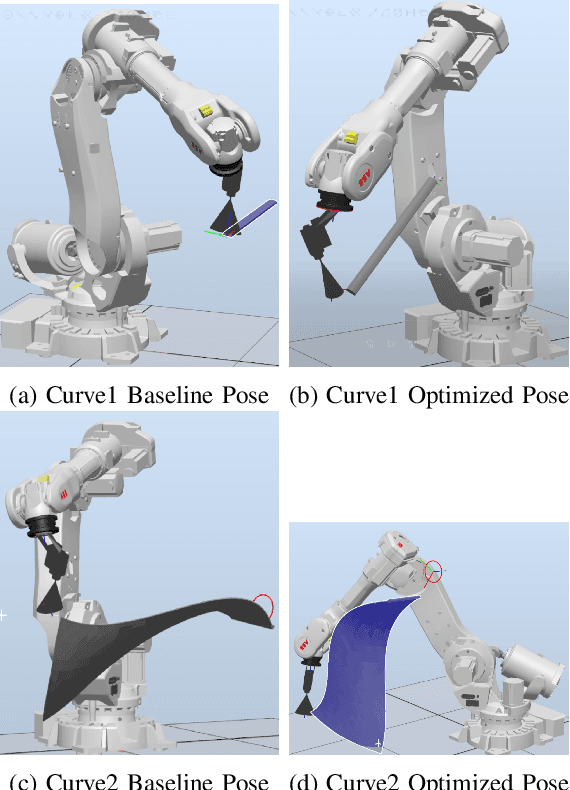
Industrial robots are increasingly deployed in applications requiring an end effector tool to closely track a specified path, such as in spraying and welding. Performance and productivity present possibly conflicting objectives: tracking accuracy, path speed, and motion uniformity. Industrial robots are programmed through motion primitives consisting of waypoints connected by pre-defined motion segments, with specified parameters such as path speed and blending zone. The actual executed robot motion depends on the robot joint servo controller and joint motion constraints (velocity, acceleration, etc.) which are largely unknown to the users. Programming a robot to achieve the desired performance today is time-consuming and mostly manual, requiring tuning a large number of coupled parameters in the motion primitives. The performance also depends on the choice of additional parameters: possible redundant degrees of freedom, location of the target curve, and the robot configuration. This paper presents a systematic approach to optimize the robot motion primitives for performance. The approach first selects the static parameters, then the motion primitives, and finally iteratively update the waypoints to minimize the tracking error. The ultimate performance objective is to maximize the path speed subject to the tracking accuracy and speed uniformity constraints over the entire path. We have demonstrated the effectiveness of this approach in simulation for ABB and FANUC robots for two challenging example curves, and experimentally for an ABB robot. Comparing with the baseline using the current industry practice, the optimized performance shows over 200% performance improvement.
Canonical Subproblems for Robot Inverse Kinematics
Nov 10, 2022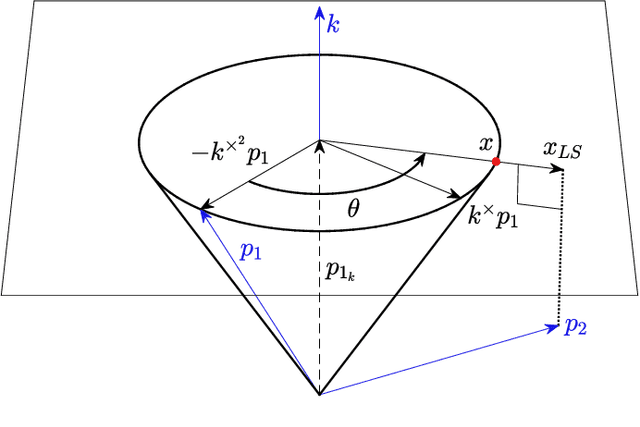

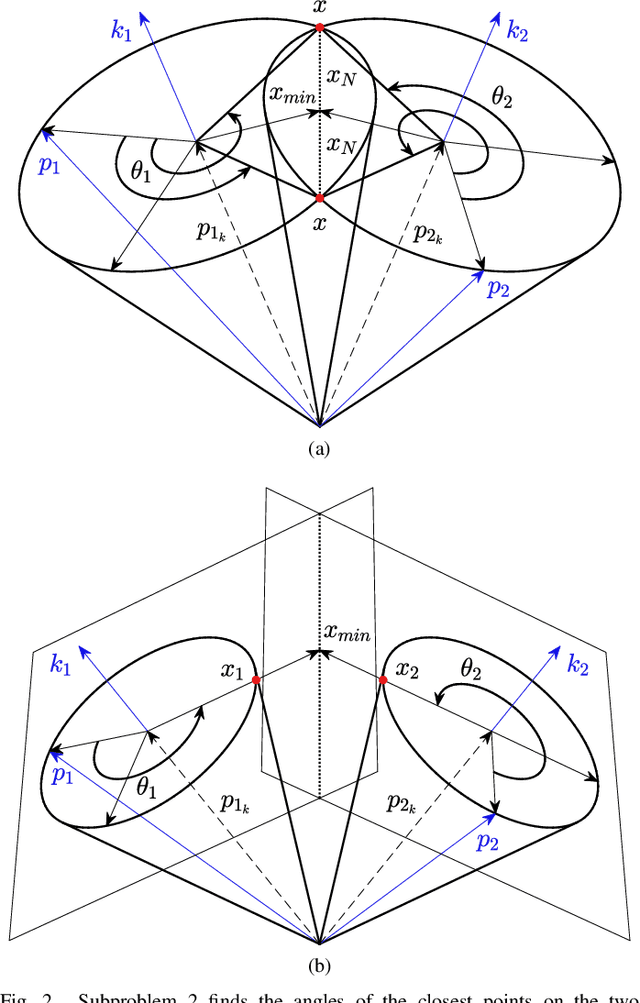
Inverse kinematics of many common types of robot manipulators may be decomposed into canonical subproblems. This paper presents new solution methods to six subproblems using a linear algebra approach. The first three subproblems, called the Paden-Kahan subproblems, are Subproblem 1: angle between a vector on the edge of a cone and a point, Subproblem 2: intersections between two cones, and Subproblem 3: intersections between a cone and a sphere. The other three subproblems, which have not been extensively covered in the literature, are Subproblem 4: intersections between a cone and a plane, Subproblem 5: intersections among three cones, and Subproblem 6: intersections in a system of four cones. We present algebraic solutions and geometric interpretations for each subproblem and provide computational performance comparisons. Our approach also finds the least-squares solutions for Subproblems 1-4 when the exact solution does not exist. We show that almost all 6-dof all revolute (6R) robots with known closed-form solutions may be solved using the subproblem decomposition method. For a general 6R robot, subproblem decomposition reduces finding all solutions to a search on a circle or a 2D torus. The software code is available on a publicly accessible repository.
Neural-Learning Trajectory Tracking Control of Flexible-Joint Robot Manipulators with Unknown Dynamics
Aug 08, 2019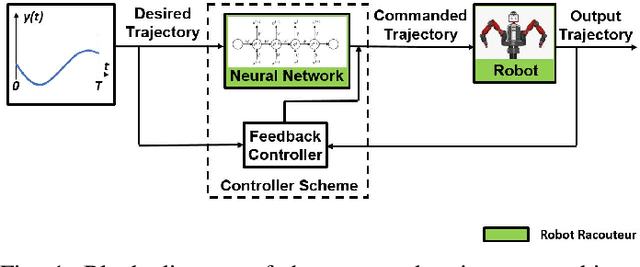
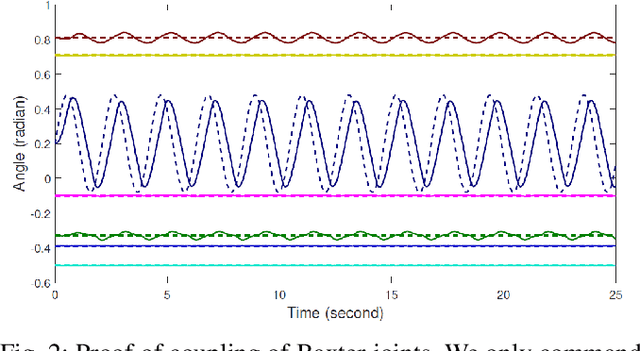
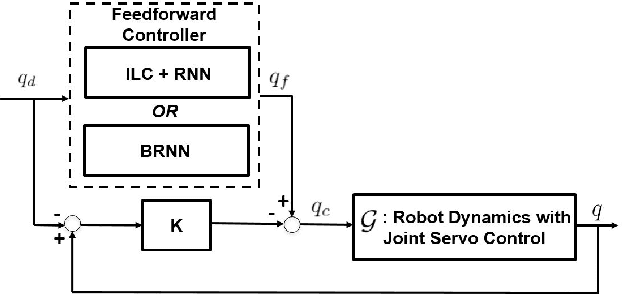
Fast and precise motion control is important for industrial robots in manufacturing applications. However, some collaborative robots sacrifice precision for safety, particular for high motion speed. The performance degradation is caused by the inability of the joint servo controller to address the uncertain nonlinear dynamics of the robot arm, e.g., due to joint flexibility. We consider two approaches to improve the trajectory tracking performance through feedforward compensation. The first approach uses iterative learning control, with the gradient-based iterative update generated from the robot forward dynamics model. The second approach uses dynamic inversion to directly compensate for the robot forward dynamics. If the forward dynamics is strictly proper or is non-minimum-phase (e.g., due to time delays), its stable inverse would be non-causal. Both approaches require robot dynamical models. This paper presents results of using recurrent neural networks (RNNs) to approximate these dynamical models-forward dynamics in the first case, inverse dynamics (possibly non-causal) in the second case. We use the bi-directional RNN to capture the noncausality. The RNNs are trained based on a collection of commanded trajectories and the actual robot responses. We use a Baxter robot to evaluate the two approaches. The Baxter robot exhibits significant joint flexibility due to the series-elastic joint actuators. Both approaches achieve sizable improvement over the uncompensated robot motion, for both random joint trajectories and Cartesian motion. The inverse dynamics method is particularly attractive as it may be used to more accurately track a user input as in teleoperation.
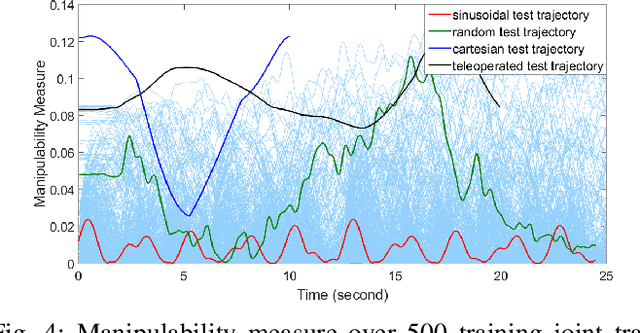
Industrial Robot Trajectory Tracking Using Multi-Layer Neural Networks Trained by Iterative Learning Control
Mar 04, 2019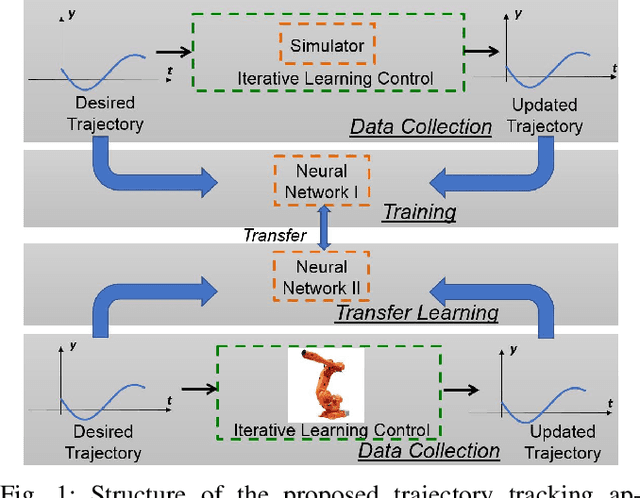
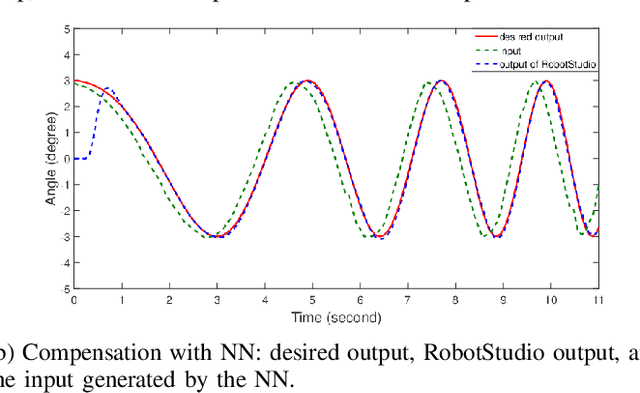
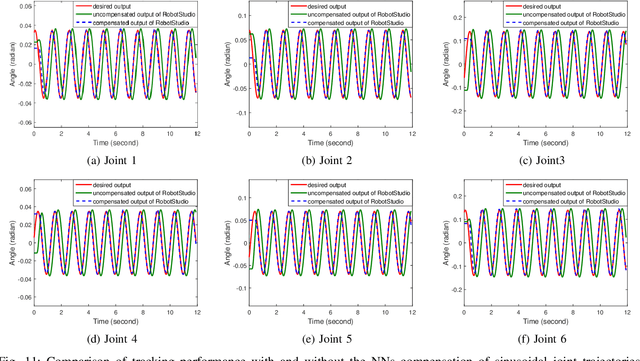
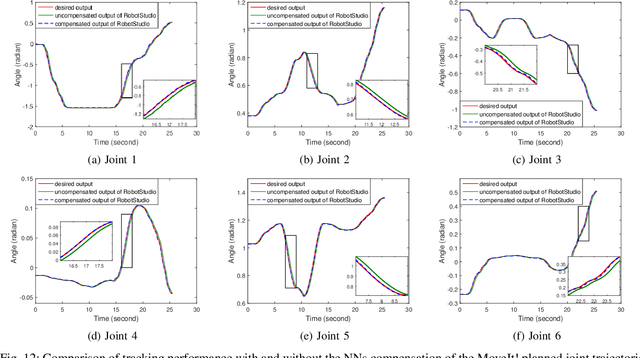
Fast and precise robot motion is needed in certain applications such as electronic manufacturing, additive manufacturing and assembly. Most industrial robot motion controllers allow externally commanded motion profile, but the trajectory tracking performance is affected by the robot dynamics and joint servo controllers which users have no direct access and little information. The performance is further compromised by time delays in transmitting the external command as a setpoint to the inner control loop. This paper presents an approach of combining neural networks and iterative learning control to improve the trajectory tracking performance for a multi-axis articulated industrial robot. For a given desired trajectory, the external command is iteratively refined using a high fidelity dynamical simulator to compensate for the robot inner loop dynamics. These desired trajectories and the corresponding refined input trajectories are then used to train multi-layer neural networks to emulate the dynamical inverse of the nonlinear inner loop dynamics. We show that with a sufficiently rich training set, the trained neural networks can generalize well to trajectories beyond the training set. In applying the trained neural networks to the physical robot, the tracking performance still improves but not as much as in the simulator. We show that transfer learning can effectively bridge the gap between simulation and the physical robot. In the end, we test the trained neural networks on other robot models in simulation and demonstrate the possibility of a general purpose network. Development and evaluation of this methodology is based on the ABB IRB6640-180 industrial robot and ABB RobotStudio software packages.