 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShuyang Chen
Adaptive Neural Trajectory Tracking Control for Flexible-Joint Robots with Online Learning
Mar 11, 2020
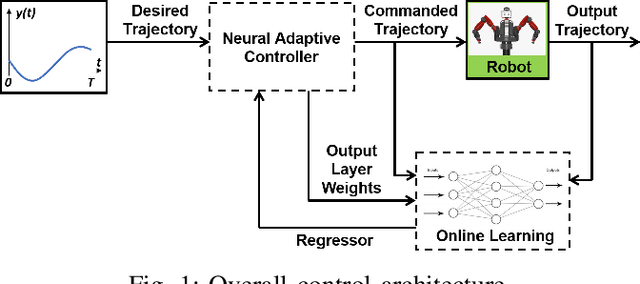
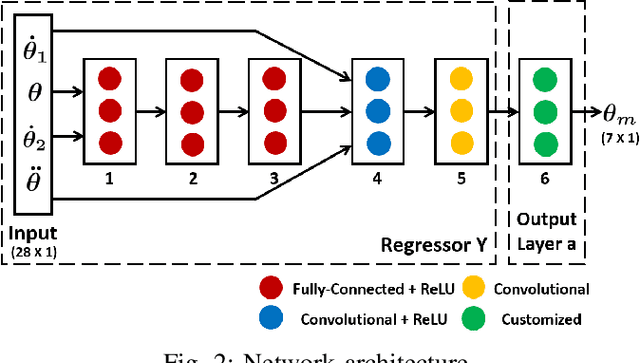
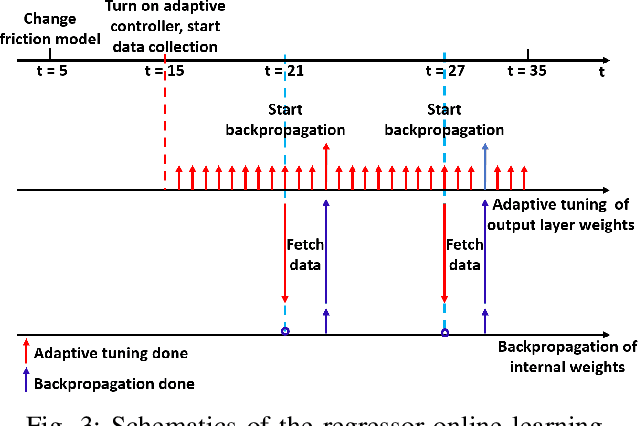
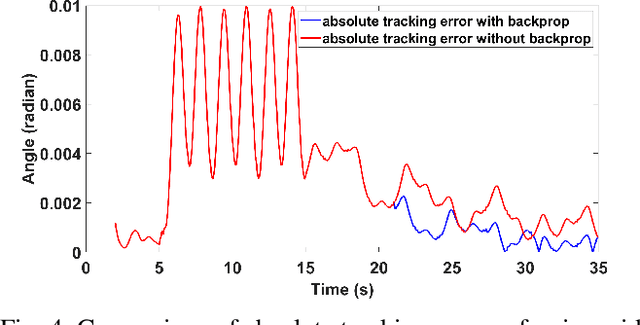
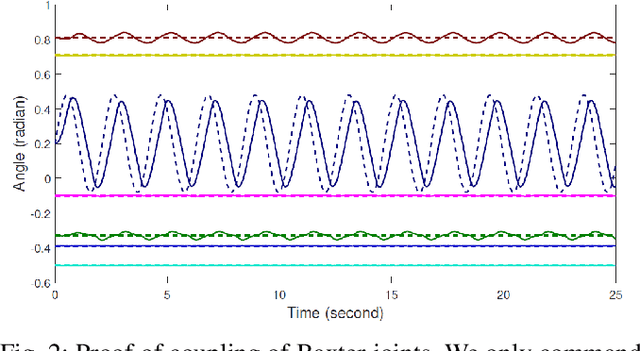
Collaborative robots and space manipulators contain significant joint flexibility. It complicates the control design, compromises the control bandwidth, and limits the tracking accuracy. The imprecise knowledge of the flexible joint dynamics compounds the challenge. In this paper, we present a new control architecture for controlling flexible-joint robots. Our approach uses a multi-layer neural network to approximate unknown dynamics needed for the feedforward control. The network may be viewed as a linear-in-parameter representation of the robot dynamics, with the nonlinear basis of the robot dynamics connected to the linear output layer. The output layer weights are updated based on the tracking error and the nonlinear basis. The internal weights of the nonlinear basis are updated by online backpropagation to further reduce the tracking error. To use time scale separation to reduce the coupling of the two steps - the update of the internal weights is at a lower rate compared to the update of the output layer weights. With the update of the output layer weights, our controller adapts quickly to the unknown dynamics change and disturbances (such as attaching a load). The update of the internal weights would continue to improve the converge of the nonlinear basis functions. We show the stability of the proposed scheme under the "outer loop" control, where the commanded joint position is considered as the control input. Simulation and physical experiments are conducted to demonstrate the performance of the proposed controller on a Baxter robot, which exhibits significant joint flexibility due to the series-elastic joint actuators.
Neural-Learning Trajectory Tracking Control of Flexible-Joint Robot Manipulators with Unknown Dynamics
Aug 08, 2019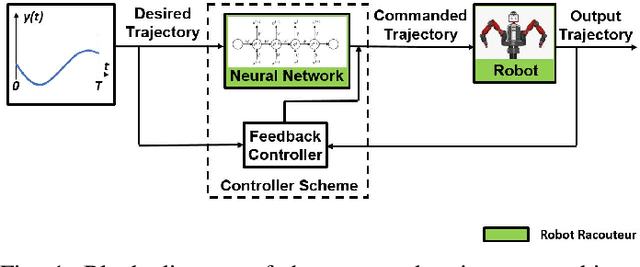
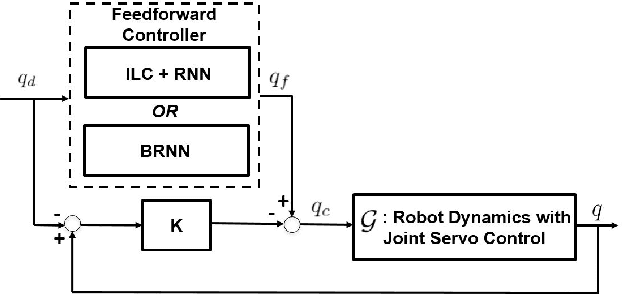
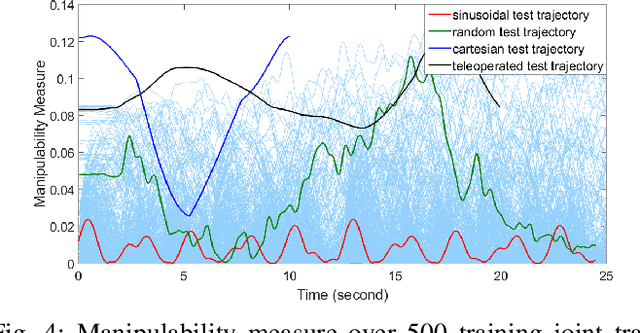
Fast and precise motion control is important for industrial robots in manufacturing applications. However, some collaborative robots sacrifice precision for safety, particular for high motion speed. The performance degradation is caused by the inability of the joint servo controller to address the uncertain nonlinear dynamics of the robot arm, e.g., due to joint flexibility. We consider two approaches to improve the trajectory tracking performance through feedforward compensation. The first approach uses iterative learning control, with the gradient-based iterative update generated from the robot forward dynamics model. The second approach uses dynamic inversion to directly compensate for the robot forward dynamics. If the forward dynamics is strictly proper or is non-minimum-phase (e.g., due to time delays), its stable inverse would be non-causal. Both approaches require robot dynamical models. This paper presents results of using recurrent neural networks (RNNs) to approximate these dynamical models-forward dynamics in the first case, inverse dynamics (possibly non-causal) in the second case. We use the bi-directional RNN to capture the noncausality. The RNNs are trained based on a collection of commanded trajectories and the actual robot responses. We use a Baxter robot to evaluate the two approaches. The Baxter robot exhibits significant joint flexibility due to the series-elastic joint actuators. Both approaches achieve sizable improvement over the uncompensated robot motion, for both random joint trajectories and Cartesian motion. The inverse dynamics method is particularly attractive as it may be used to more accurately track a user input as in teleoperation.
Industrial Robot Trajectory Tracking Using Multi-Layer Neural Networks Trained by Iterative Learning Control
Mar 04, 2019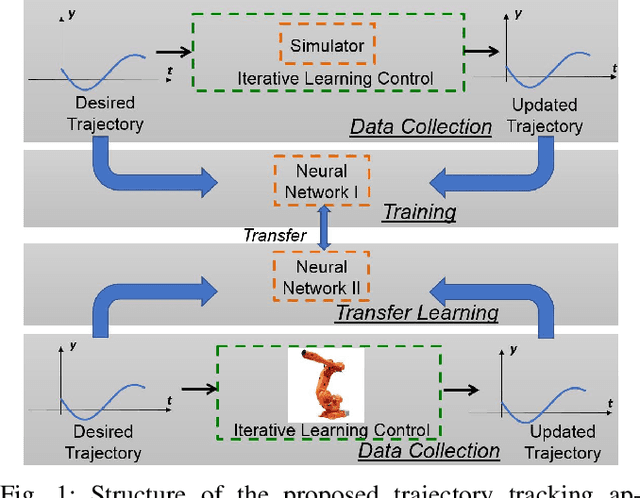
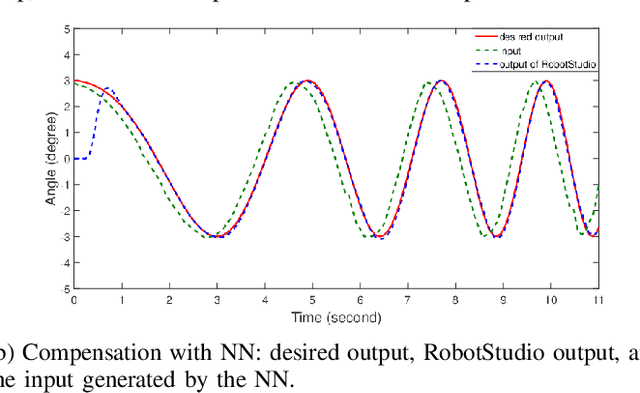
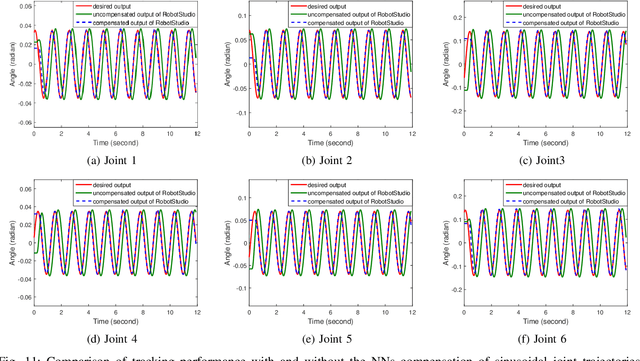
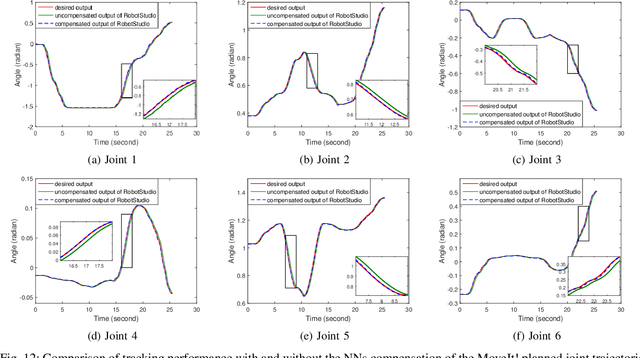
Fast and precise robot motion is needed in certain applications such as electronic manufacturing, additive manufacturing and assembly. Most industrial robot motion controllers allow externally commanded motion profile, but the trajectory tracking performance is affected by the robot dynamics and joint servo controllers which users have no direct access and little information. The performance is further compromised by time delays in transmitting the external command as a setpoint to the inner control loop. This paper presents an approach of combining neural networks and iterative learning control to improve the trajectory tracking performance for a multi-axis articulated industrial robot. For a given desired trajectory, the external command is iteratively refined using a high fidelity dynamical simulator to compensate for the robot inner loop dynamics. These desired trajectories and the corresponding refined input trajectories are then used to train multi-layer neural networks to emulate the dynamical inverse of the nonlinear inner loop dynamics. We show that with a sufficiently rich training set, the trained neural networks can generalize well to trajectories beyond the training set. In applying the trained neural networks to the physical robot, the tracking performance still improves but not as much as in the simulator. We show that transfer learning can effectively bridge the gap between simulation and the physical robot. In the end, we test the trained neural networks on other robot models in simulation and demonstrate the possibility of a general purpose network. Development and evaluation of this methodology is based on the ABB IRB6640-180 industrial robot and ABB RobotStudio software packages.