 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKasun Weerakoon
CoNVOI: Context-aware Navigation using Vision Language Models in Outdoor and Indoor Environments
Mar 22, 2024
We present ConVOI, a novel method for autonomous robot navigation in real-world indoor and outdoor environments using Vision Language Models (VLMs). We employ VLMs in two ways: first, we leverage their zero-shot image classification capability to identify the context or scenario (e.g., indoor corridor, outdoor terrain, crosswalk, etc) of the robot's surroundings, and formulate context-based navigation behaviors as simple text prompts (e.g. ``stay on the pavement"). Second, we utilize their state-of-the-art semantic understanding and logical reasoning capabilities to compute a suitable trajectory given the identified context. To this end, we propose a novel multi-modal visual marking approach to annotate the obstacle-free regions in the RGB image used as input to the VLM with numbers, by correlating it with a local occupancy map of the environment. The marked numbers ground image locations in the real-world, direct the VLM's attention solely to navigable locations, and elucidate the spatial relationships between them and terrains depicted in the image to the VLM. Next, we query the VLM to select numbers on the marked image that satisfy the context-based behavior text prompt, and construct a reference path using the selected numbers. Finally, we propose a method to extrapolate the reference trajectory when the robot's environmental context has not changed to prevent unnecessary VLM queries. We use the reference trajectory to guide a motion planner, and demonstrate that it leads to human-like behaviors (e.g. not cutting through a group of people, using crosswalks, etc.) in various real-world indoor and outdoor scenarios.
AMCO: Adaptive Multimodal Coupling of Vision and Proprioception for Quadruped Robot Navigation in Outdoor Environments
Mar 20, 2024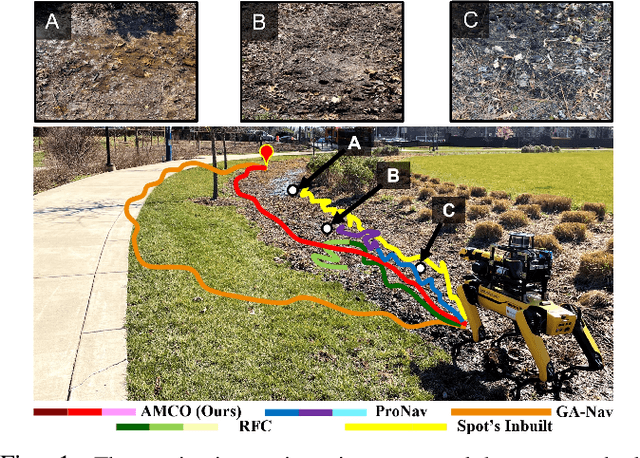
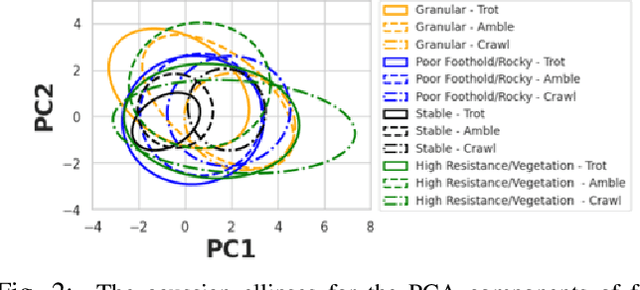
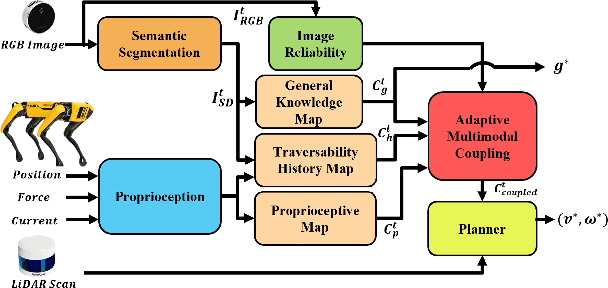
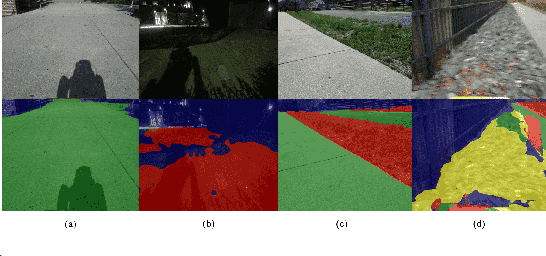
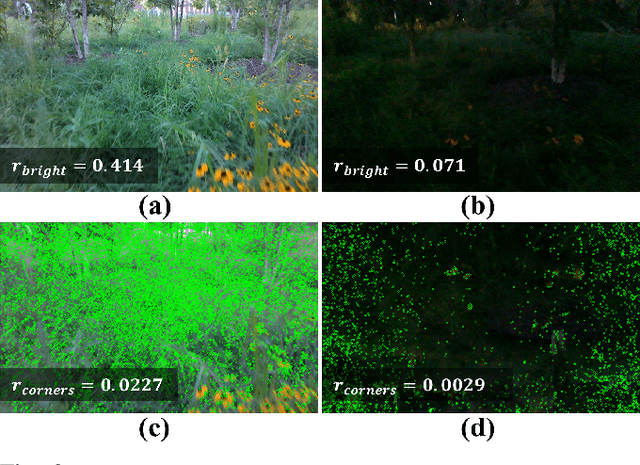
We present AMCO, a novel navigation method for quadruped robots that adaptively combines vision-based and proprioception-based perception capabilities. Our approach uses three cost maps: general knowledge map; traversability history map; and current proprioception map; which are derived from a robot's vision and proprioception data, and couples them to obtain a coupled traversability cost map for navigation. The general knowledge map encodes terrains semantically segmented from visual sensing, and represents a terrain's typically expected traversability. The traversability history map encodes the robot's recent proprioceptive measurements on a terrain and its semantic segmentation as a cost map. Further, the robot's present proprioceptive measurement is encoded as a cost map in the current proprioception map. As the general knowledge map and traversability history map rely on semantic segmentation, we evaluate the reliability of the visual sensory data by estimating the brightness and motion blur of input RGB images and accordingly combine the three cost maps to obtain the coupled traversability cost map used for navigation. Leveraging this adaptive coupling, the robot can depend on the most reliable input modality available. Finally, we present a novel planner that selects appropriate gaits and velocities for traversing challenging outdoor environments using the coupled traversability cost map. We demonstrate AMCO's navigation performance in different real-world outdoor environments and observe 10.8%-34.9% reduction w.r.t. two stability metrics, and up to 50% improvement in terms of success rate compared to current navigation methods.
AdVENTR: Autonomous Robot Navigation in Complex Outdoor Environments
Nov 15, 2023We present a novel system, AdVENTR for autonomous robot navigation in unstructured outdoor environments that consist of uneven and vegetated terrains. Our approach is general and can enable both wheeled and legged robots to handle outdoor terrain complexity including unevenness, surface properties like poor traction, granularity, obstacle stiffness, etc. We use data from sensors including RGB cameras, 3D Lidar, IMU, robot odometry, and pose information with efficient learning-based perception and planning algorithms that can execute on edge computing hardware. Our system uses a scene-aware switching method to perceive the environment for navigation at any time instant and dynamically switches between multiple perception algorithms. We test our system in a variety of sloped, rocky, muddy, and densely vegetated terrains and demonstrate its performance on Husky and Spot robots.
Using Lidar Intensity for Robot Navigation
Sep 28, 2023We present Multi-Layer Intensity Map, a novel 3D object representation for robot perception and autonomous navigation. Intensity maps consist of multiple stacked layers of 2D grid maps each derived from reflected point cloud intensities corresponding to a certain height interval. The different layers of intensity maps can be used to simultaneously estimate obstacles' height, solidity/density, and opacity. We demonstrate that intensity maps' can help accurately differentiate obstacles that are safe to navigate through (e.g. beaded/string curtains, pliable tall grass), from ones that must be avoided (e.g. transparent surfaces such as glass walls, bushes, trees, etc.) in indoor and outdoor environments. Further, to handle narrow passages, and navigate through non-solid obstacles in dense environments, we propose an approach to adaptively inflate or enlarge the obstacles detected on intensity maps based on their solidity, and the robot's preferred velocity direction. We demonstrate these improved navigation capabilities in real-world narrow, dense environments using a real Turtlebot and Boston Dynamics Spot robots. We observe significant increases in success rates to more than 50%, up to a 9.5% decrease in normalized trajectory length, and up to a 22.6% increase in the F-score compared to current navigation methods using other sensor modalities.
VAPOR: Legged Robot Navigation in Outdoor Vegetation Using Offline Reinforcement Learning
Sep 19, 2023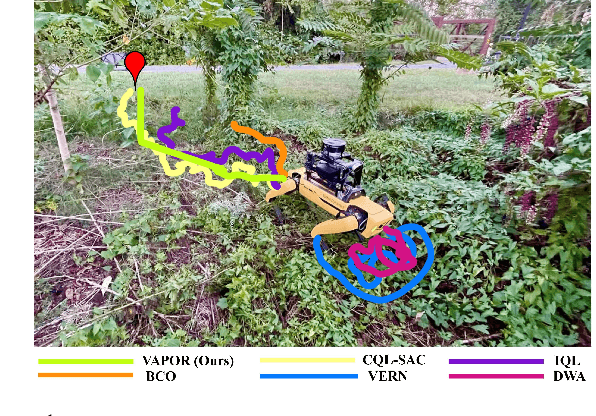
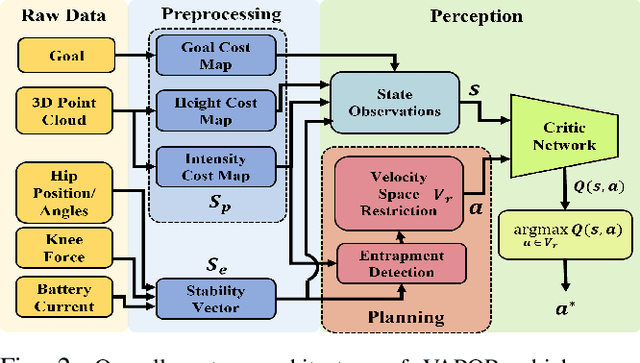
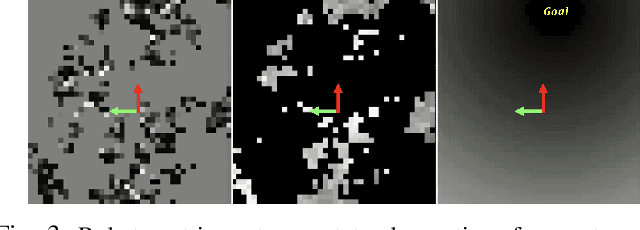
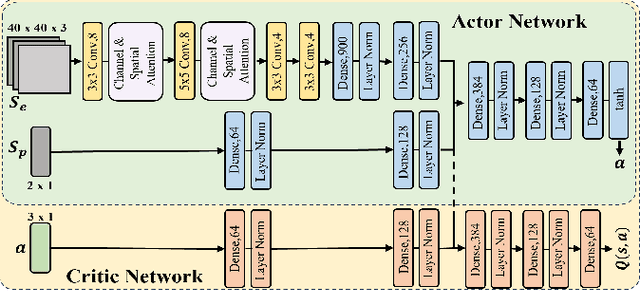
We present VAPOR, a novel method for autonomous legged robot navigation in unstructured, densely vegetated outdoor environments using offline Reinforcement Learning (RL). Our method trains a novel RL policy using an actor-critic network and arbitrary data collected in real outdoor vegetation. Our policy uses height and intensity-based cost maps derived from 3D LiDAR point clouds, a goal cost map, and processed proprioception data as state inputs, and learns the physical and geometric properties of the surrounding obstacles such as height, density, and solidity/stiffness. The fully-trained policy's critic network is then used to evaluate the quality of dynamically feasible velocities generated from a novel context-aware planner. Our planner adapts the robot's velocity space based on the presence of entrapment inducing vegetation, and narrow passages in dense environments. We demonstrate our method's capabilities on a Spot robot in complex real-world outdoor scenes, including dense vegetation. We observe that VAPOR's actions improve success rates by up to 40%, decrease the average current consumption by up to 2.9%, and decrease the normalized trajectory length by up to 11.2% compared to existing end-to-end offline RL and other outdoor navigation methods.
ProNav: Proprioceptive Traversability Estimation for Legged Robot Navigation in Outdoor Environments
Jul 26, 2023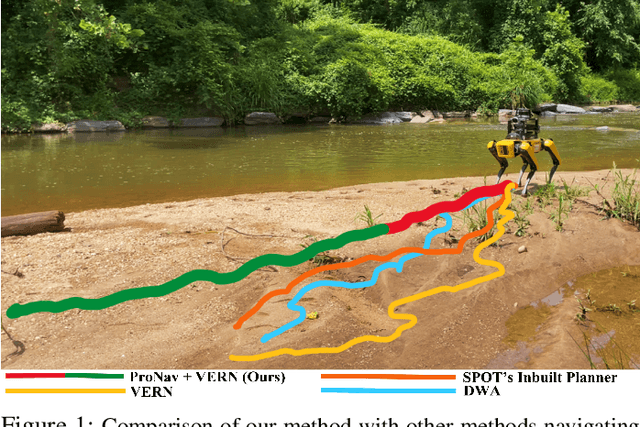
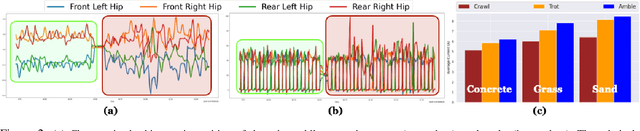
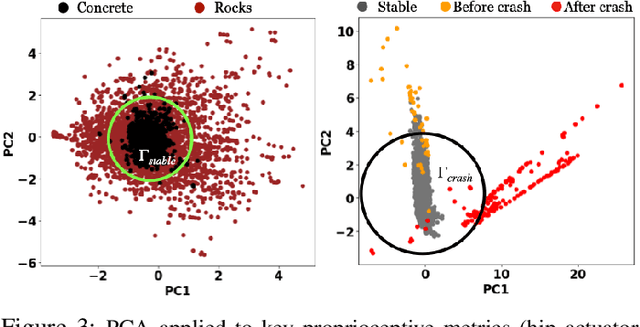
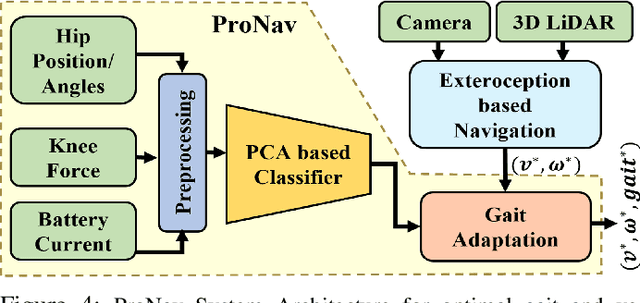
We propose a novel method, ProNav, which uses proprioceptive signals for traversability estimation in challenging outdoor terrains for autonomous legged robot navigation. Our approach uses sensor data from a legged robot's joint encoders, force, and current sensors to measure the joint positions, forces, and current consumption respectively to accurately assess a terrain's stability, resistance to the robot's motion, risk of entrapment, and crash. Based on these factors, we compute the appropriate robot trajectories and gait to maximize stability and minimize energy consumption. Our approach can also be used to predict imminent crashes in challenging terrains and execute behaviors to preemptively avoid them. We integrate ProNav with a vision-based method to navigate dense vegetation and demonstrate our method's benefits in real-world terrains with dense bushes, high granularity, negative obstacles, etc. Our method shows an improvement up to 50% in terms of success rate and up to 22.5% reduction in terms of energy consumption compared to exteroceptive based methods.
Ada-NAV: Adaptive Trajectory-Based Sample Efficient Policy Learning for Robotic Navigation
Jun 09, 2023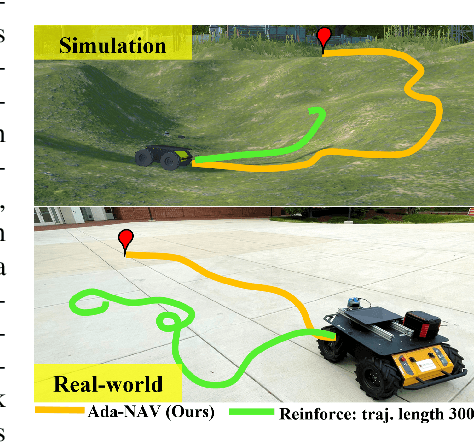
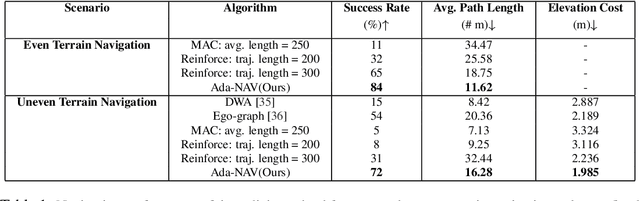
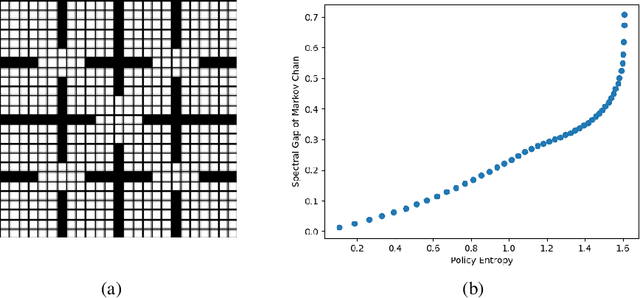
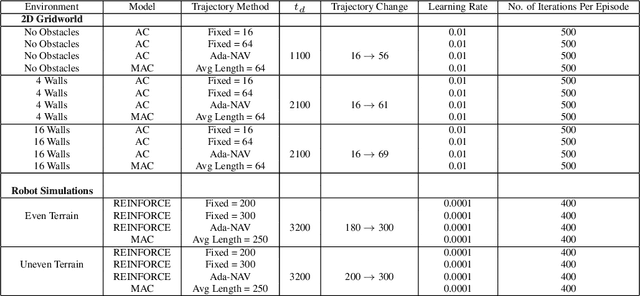
Reinforcement learning methods, while effective for learning robotic navigation strategies, are known to be highly sample inefficient. This sample inefficiency comes in part from not suitably balancing the explore-exploit dilemma, especially in the presence of non-stationarity, during policy optimization. To incorporate a balance of exploration-exploitation for sample efficiency, we propose Ada-NAV, an adaptive trajectory length scheme where the length grows as a policy's randomness, represented by its Shannon or differential entropy, decreases. Our adaptive trajectory length scheme emphasizes exploration at the beginning of training due to more frequent gradient updates and emphasizes exploitation later on with longer trajectories. In gridworld, simulated robotic environments, and real-world robotic experiments, we demonstrate the merits of the approach over constant and randomly sampled trajectory lengths in terms of performance and sample efficiency. For a fixed sample budget, Ada-NAV results in an 18% increase in navigation success rate, a 20-38% decrease in the navigation path length, and 9.32% decrease in the elevation cost compared to the policies obtained by the other methods. We also demonstrate that Ada-NAV can be transferred and integrated into a Clearpath Husky robot without significant performance degradation.
VERN: Vegetation-aware Robot Navigation in Dense Unstructured Outdoor Environments
Mar 25, 2023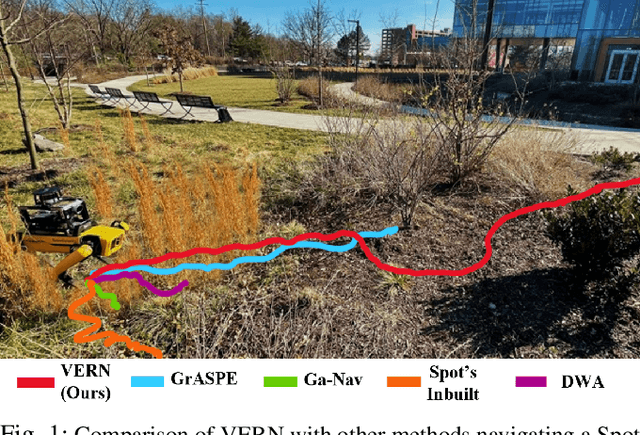
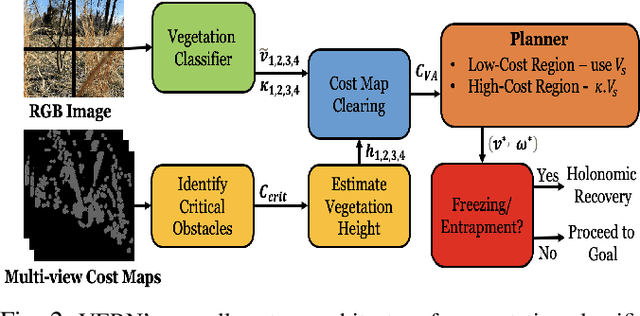


We propose a novel method for autonomous legged robot navigation in densely vegetated environments with a variety of pliable/traversable and non-pliable/untraversable vegetation. We present a novel few-shot learning classifier that can be trained on a few hundred RGB images to differentiate flora that can be navigated through, from the ones that must be circumvented. Using the vegetation classification and 2D lidar scans, our method constructs a vegetation-aware traversability cost map that accurately represents the pliable and non-pliable obstacles with lower, and higher traversability costs, respectively. Our cost map construction accounts for misclassifications of the vegetation and further lowers the risk of collisions, freezing and entrapment in vegetation during navigation. Furthermore, we propose holonomic recovery behaviors for the robot for scenarios where it freezes, or gets physically entrapped in dense, pliable vegetation. We demonstrate our method on a Boston Dynamics Spot robot in real-world unstructured environments with sparse and dense tall grass, bushes, trees, etc. We observe an increase of 25-90% in success rates, 10-90% decrease in freezing rate, and up to 65% decrease in the false positive rate compared to existing methods.
RE-MOVE: An Adaptive Policy Design Approach for Dynamic Environments via Language-Based Feedback
Mar 14, 2023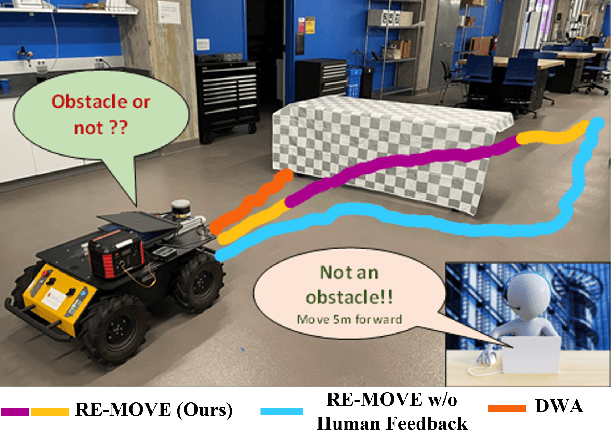
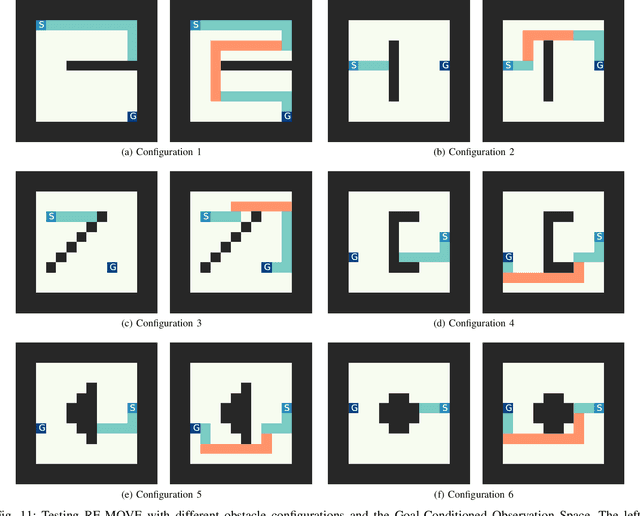
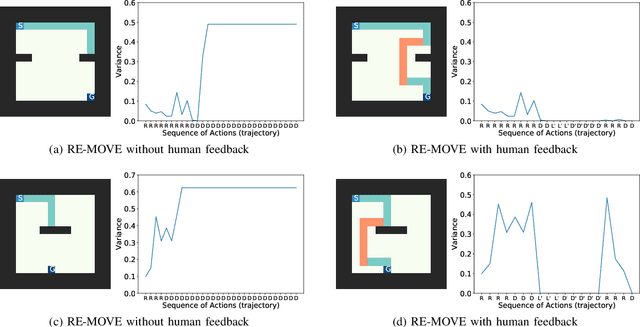
Reinforcement learning-based policies for continuous control robotic navigation tasks often fail to adapt to changes in the environment during real-time deployment, which may result in catastrophic failures. To address this limitation, we propose a novel approach called RE-MOVE (\textbf{RE}quest help and \textbf{MOVE} on), which uses language-based feedback to adjust trained policies to real-time changes in the environment. In this work, we enable the trained policy to decide \emph{when to ask for feedback} and \emph{how to incorporate feedback into trained policies}. RE-MOVE incorporates epistemic uncertainty to determine the optimal time to request feedback from humans and uses language-based feedback for real-time adaptation. We perform extensive synthetic and real-world evaluations to demonstrate the benefits of our proposed approach in several test-time dynamic navigation scenarios. Our approach enable robots to learn from human feedback and adapt to previously unseen adversarial situations.
GrASPE: Graph based Multimodal Fusion for Robot Navigation in Unstructured Outdoor Environments
Sep 13, 2022

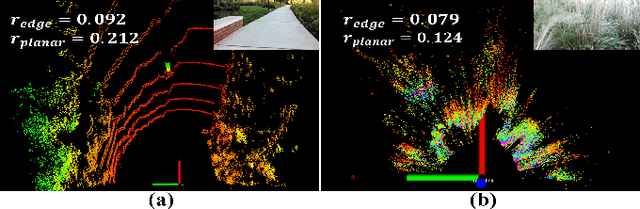
We present a novel trajectory traversability estimation and planning algorithm for robot navigation in complex outdoor environments. We incorporate multimodal sensory inputs from an RGB camera, 3D LiDAR, and robot's odometry sensor to train a prediction model to estimate candidate trajectories' success probabilities based on partially reliable multi-modal sensor observations. We encode high-dimensional multi-modal sensory inputs to low-dimensional feature vectors using encoder networks and represent them as a connected graph to train an attention-based Graph Neural Network (GNN) model to predict trajectory success probabilities. We further analyze the image and point cloud data separately to quantify sensor reliability to augment the weights of the feature graph representation used in our GNN. During runtime, our model utilizes multi-sensor inputs to predict the success probabilities of the trajectories generated by a local planner to avoid potential collisions and failures. Our algorithm demonstrates robust predictions when one or more sensor modalities are unreliable or unavailable in complex outdoor environments. We evaluate our algorithm's navigation performance using a Spot robot in real-world outdoor environments.