 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKianté Brantley
REBEL: Reinforcement Learning via Regressing Relative Rewards
Apr 25, 2024
While originally developed for continuous control problems, Proximal Policy Optimization (PPO) has emerged as the work-horse of a variety of reinforcement learning (RL) applications including the fine-tuning of generative models. Unfortunately, PPO requires multiple heuristics to enable stable convergence (e.g. value networks, clipping) and is notorious for its sensitivity to the precise implementation of these components. In response, we take a step back and ask what a minimalist RL algorithm for the era of generative models would look like. We propose REBEL, an algorithm that cleanly reduces the problem of policy optimization to regressing the relative rewards via a direct policy parameterization between two completions to a prompt, enabling strikingly lightweight implementation. In theory, we prove that fundamental RL algorithms like Natural Policy Gradient can be seen as variants of REBEL, which allows us to match the strongest known theoretical guarantees in terms of convergence and sample complexity in the RL literature. REBEL can also cleanly incorporate offline data and handle the intransitive preferences we frequently see in practice. Empirically, we find that REBEL provides a unified approach to language modeling and image generation with stronger or similar performance as PPO and DPO, all while being simpler to implement and more computationally tractable than PPO.
Dataset Reset Policy Optimization for RLHF
Apr 15, 2024Reinforcement Learning (RL) from Human Preference-based feedback is a popular paradigm for fine-tuning generative models, which has produced impressive models such as GPT-4 and Claude3 Opus. This framework often consists of two steps: learning a reward model from an offline preference dataset followed by running online RL to optimize the learned reward model. In this work, leveraging the idea of reset, we propose a new RLHF algorithm with provable guarantees. Motivated by the fact that offline preference dataset provides informative states (i.e., data that is preferred by the labelers), our new algorithm, Dataset Reset Policy Optimization (DR-PO), integrates the existing offline preference dataset into the online policy training procedure via dataset reset: it directly resets the policy optimizer to the states in the offline dataset, instead of always starting from the initial state distribution. In theory, we show that DR-PO learns to perform at least as good as any policy that is covered by the offline dataset under general function approximation with finite sample complexity. In experiments, we demonstrate that on both the TL;DR summarization and the Anthropic Helpful Harmful (HH) dataset, the generation from DR-PO is better than that from Proximal Policy Optimization (PPO) and Direction Preference Optimization (DPO), under the metric of GPT4 win-rate. Code for this work can be found at https://github.com/Cornell-RL/drpo.
Adversarial Imitation Learning via Boosting
Apr 12, 2024Adversarial imitation learning (AIL) has stood out as a dominant framework across various imitation learning (IL) applications, with Discriminator Actor Critic (DAC) (Kostrikov et al.,, 2019) demonstrating the effectiveness of off-policy learning algorithms in improving sample efficiency and scalability to higher-dimensional observations. Despite DAC's empirical success, the original AIL objective is on-policy and DAC's ad-hoc application of off-policy training does not guarantee successful imitation (Kostrikov et al., 2019; 2020). Follow-up work such as ValueDICE (Kostrikov et al., 2020) tackles this issue by deriving a fully off-policy AIL objective. Instead in this work, we develop a novel and principled AIL algorithm via the framework of boosting. Like boosting, our new algorithm, AILBoost, maintains an ensemble of properly weighted weak learners (i.e., policies) and trains a discriminator that witnesses the maximum discrepancy between the distributions of the ensemble and the expert policy. We maintain a weighted replay buffer to represent the state-action distribution induced by the ensemble, allowing us to train discriminators using the entire data collected so far. In the weighted replay buffer, the contribution of the data from older policies are properly discounted with the weight computed based on the boosting framework. Empirically, we evaluate our algorithm on both controller state-based and pixel-based environments from the DeepMind Control Suite. AILBoost outperforms DAC on both types of environments, demonstrating the benefit of properly weighting replay buffer data for off-policy training. On state-based environments, DAC outperforms ValueDICE and IQ-Learn (Gary et al., 2021), achieving competitive performance with as little as one expert trajectory.
RL for Consistency Models: Faster Reward Guided Text-to-Image Generation
Mar 25, 2024Reinforcement learning (RL) has improved guided image generation with diffusion models by directly optimizing rewards that capture image quality, aesthetics, and instruction following capabilities. However, the resulting generative policies inherit the same iterative sampling process of diffusion models that causes slow generation. To overcome this limitation, consistency models proposed learning a new class of generative models that directly map noise to data, resulting in a model that can generate an image in as few as one sampling iteration. In this work, to optimize text-to-image generative models for task specific rewards and enable fast training and inference, we propose a framework for fine-tuning consistency models via RL. Our framework, called Reinforcement Learning for Consistency Model (RLCM), frames the iterative inference process of a consistency model as an RL procedure. RLCM improves upon RL fine-tuned diffusion models on text-to-image generation capabilities and trades computation during inference time for sample quality. Experimentally, we show that RLCM can adapt text-to-image consistency models to objectives that are challenging to express with prompting, such as image compressibility, and those derived from human feedback, such as aesthetic quality. Comparing to RL finetuned diffusion models, RLCM trains significantly faster, improves the quality of the generation measured under the reward objectives, and speeds up the inference procedure by generating high quality images with as few as two inference steps. Our code is available at https://rlcm.owenoertell.com
A Surprising Failure? Multimodal LLMs and the NLVR Challenge
Feb 26, 2024This study evaluates three state-of-the-art MLLMs -- GPT-4V, Gemini Pro, and the open-source model IDEFICS -- on the compositional natural language vision reasoning task NLVR. Given a human-written sentence paired with a synthetic image, this task requires the model to determine the truth value of the sentence with respect to the image. Despite the strong performance demonstrated by these models, we observe they perform poorly on NLVR, which was constructed to require compositional and spatial reasoning, and to be robust for semantic and systematic biases.
Reviewer2: Optimizing Review Generation Through Prompt Generation
Feb 16, 2024Recent developments in LLMs offer new opportunities for assisting authors in improving their work. In this paper, we envision a use case where authors can receive LLM-generated reviews that uncover weak points in the current draft. While initial methods for automated review generation already exist, these methods tend to produce reviews that lack detail, and they do not cover the range of opinions that human reviewers produce. To address this shortcoming, we propose an efficient two-stage review generation framework called Reviewer2. Unlike prior work, this approach explicitly models the distribution of possible aspects that the review may address. We show that this leads to more detailed reviews that better cover the range of aspects that human reviewers identify in the draft. As part of the research, we generate a large-scale review dataset of 27k papers and 99k reviews that we annotate with aspect prompts, which we make available as a resource for future research.
Policy-Gradient Training of Language Models for Ranking
Oct 06, 2023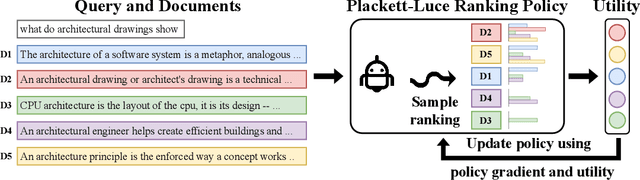
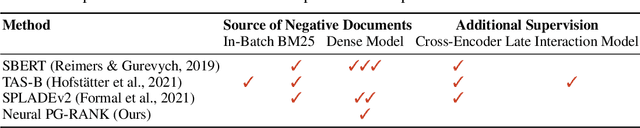

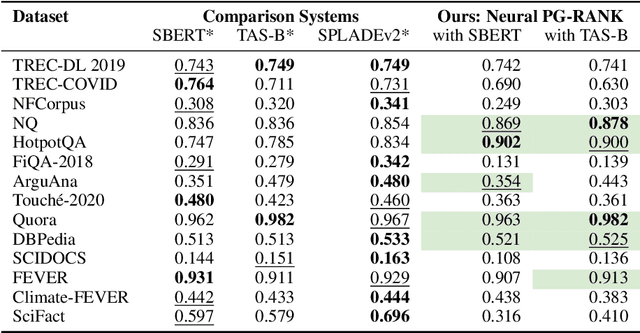
Text retrieval plays a crucial role in incorporating factual knowledge for decision making into language processing pipelines, ranging from chat-based web search to question answering systems. Current state-of-the-art text retrieval models leverage pre-trained large language models (LLMs) to achieve competitive performance, but training LLM-based retrievers via typical contrastive losses requires intricate heuristics, including selecting hard negatives and using additional supervision as learning signals. This reliance on heuristics stems from the fact that the contrastive loss itself is heuristic and does not directly optimize the downstream metrics of decision quality at the end of the processing pipeline. To address this issue, we introduce Neural PG-RANK, a novel training algorithm that learns to rank by instantiating a LLM as a Plackett-Luce ranking policy. Neural PG-RANK provides a principled method for end-to-end training of retrieval models as part of larger decision systems via policy gradient, with little reliance on complex heuristics, and it effectively unifies the training objective with downstream decision-making quality. We conduct extensive experiments on various text retrieval benchmarks. The results demonstrate that when the training objective aligns with the evaluation setup, Neural PG-RANK yields remarkable in-domain performance improvement, with substantial out-of-domain generalization to some critical datasets employed in downstream question answering tasks.
Ranking with Long-Term Constraints
Jul 10, 2023The feedback that users provide through their choices (e.g., clicks, purchases) is one of the most common types of data readily available for training search and recommendation algorithms. However, myopically training systems based on choice data may only improve short-term engagement, but not the long-term sustainability of the platform and the long-term benefits to its users, content providers, and other stakeholders. In this paper, we thus develop a new framework in which decision makers (e.g., platform operators, regulators, users) can express long-term goals for the behavior of the platform (e.g., fairness, revenue distribution, legal requirements). These goals take the form of exposure or impact targets that go well beyond individual sessions, and we provide new control-based algorithms to achieve these goals. In particular, the controllers are designed to achieve the stated long-term goals with minimum impact on short-term engagement. Beyond the principled theoretical derivation of the controllers, we evaluate the algorithms on both synthetic and real-world data. While all controllers perform well, we find that they provide interesting trade-offs in efficiency, robustness, and the ability to plan ahead.
Interactive Text Generation
Mar 17, 2023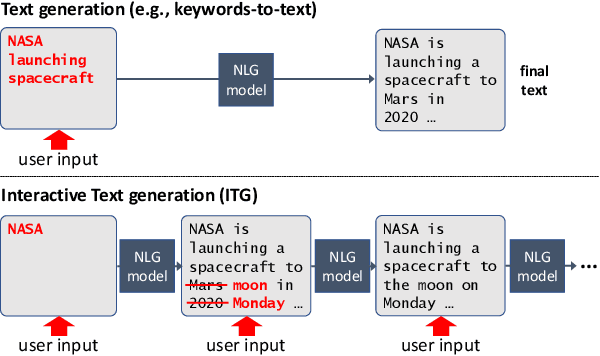
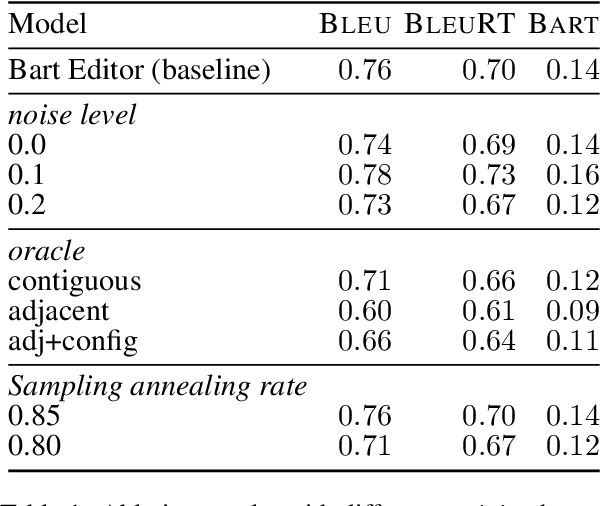
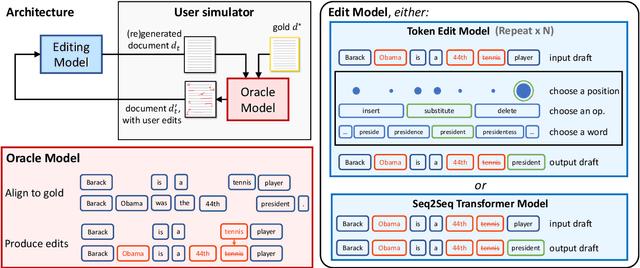
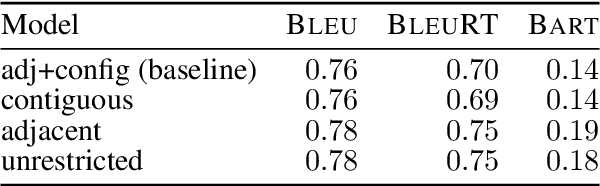
Users interact with text, image, code, or other editors on a daily basis. However, machine learning models are rarely trained in the settings that reflect the interactivity between users and their editor. This is understandable as training AI models with real users is not only slow and costly, but what these models learn may be specific to user interface design choices. Unfortunately, this means most of the research on text, code, and image generation has focused on non-interactive settings, whereby the model is expected to get everything right without accounting for any input from a user who may be willing to help. We introduce a new Interactive Text Generation task that allows training generation models interactively without the costs of involving real users, by using user simulators that provide edits that guide the model towards a given target text. We train our interactive models using Imitation Learning, and our experiments against competitive non-interactive generation models show that models trained interactively are superior to their non-interactive counterparts, even when all models are given the same budget of user inputs or edits.
lilGym: Natural Language Visual Reasoning with Reinforcement Learning
Nov 03, 2022


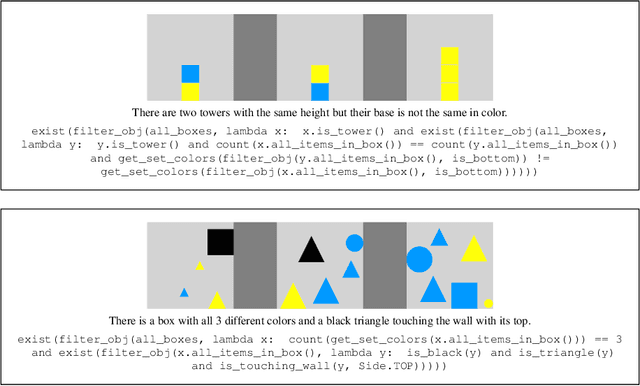
We present lilGym, a new benchmark for language-conditioned reinforcement learning in visual environments. lilGym is based on 2,661 highly-compositional human-written natural language statements grounded in an interactive visual environment. We annotate all statements with executable Python programs representing their meaning to enable exact reward computation in every possible world state. Each statement is paired with multiple start states and reward functions to form thousands of distinct Markov Decision Processes of varying difficulty. We experiment with lilGym with different models and learning regimes. Our results and analysis show that while existing methods are able to achieve non-trivial performance, lilGym forms a challenging open problem. lilGym is available at https://lil.nlp.cornell.edu/lilgym/.