 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLaura Oliva
Decentralised, Collaborative, and Privacy-preserving Machine Learning for Multi-Hospital Data
Jan 31, 2024
Machine Learning (ML) has demonstrated its great potential on medical data analysis. Large datasets collected from diverse sources and settings are essential for ML models in healthcare to achieve better accuracy and generalizability. Sharing data across different healthcare institutions is challenging because of complex and varying privacy and regulatory requirements. Hence, it is hard but crucial to allow multiple parties to collaboratively train an ML model leveraging the private datasets available at each party without the need for direct sharing of those datasets or compromising the privacy of the datasets through collaboration. In this paper, we address this challenge by proposing Decentralized, Collaborative, and Privacy-preserving ML for Multi-Hospital Data (DeCaPH). It offers the following key benefits: (1) it allows different parties to collaboratively train an ML model without transferring their private datasets; (2) it safeguards patient privacy by limiting the potential privacy leakage arising from any contents shared across the parties during the training process; and (3) it facilitates the ML model training without relying on a centralized server. We demonstrate the generalizability and power of DeCaPH on three distinct tasks using real-world distributed medical datasets: patient mortality prediction using electronic health records, cell-type classification using single-cell human genomes, and pathology identification using chest radiology images. We demonstrate that the ML models trained with DeCaPH framework have an improved utility-privacy trade-off, showing it enables the models to have good performance while preserving the privacy of the training data points. In addition, the ML models trained with DeCaPH framework in general outperform those trained solely with the private datasets from individual parties, showing that DeCaPH enhances the model generalizability.
A Model for Multi-View Residual Covariances based on Perspective Deformation
Feb 01, 2022
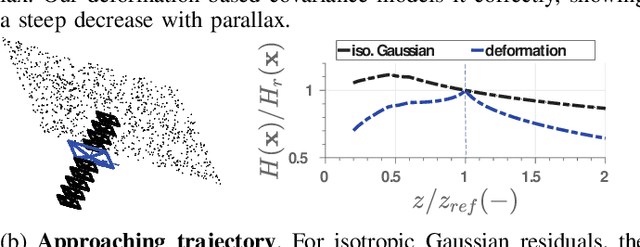

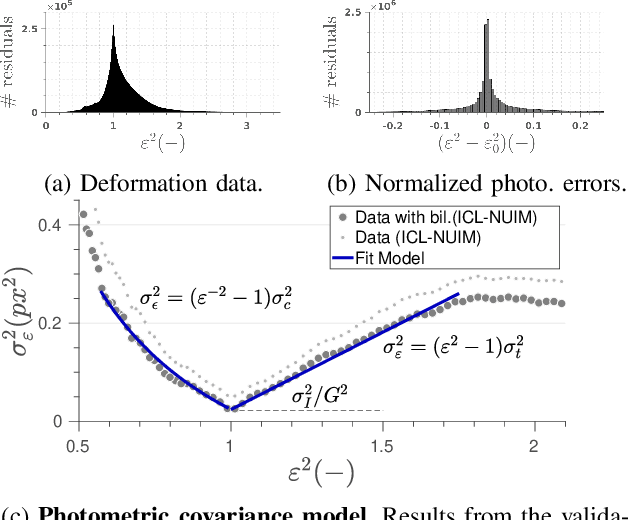
In this work, we derive a model for the covariance of the visual residuals in multi-view SfM, odometry and SLAM setups. The core of our approach is the formulation of the residual covariances as a combination of geometric and photometric noise sources. And our key novel contribution is the derivation of a term modelling how local 2D patches suffer from perspective deformation when imaging 3D surfaces around a point. Together, these add up to an efficient and general formulation which not only improves the accuracy of both feature-based and direct methods, but can also be used to estimate more accurate measures of the state entropy and hence better founded point visibility thresholds. We validate our model with synthetic and real data and integrate it into photometric and feature-based Bundle Adjustment, improving their accuracy with a negligible overhead.