 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLifeng Zhou
Domain-Transferred Synthetic Data Generation for Improving Monocular Depth Estimation
May 02, 2024
A major obstacle to the development of effective monocular depth estimation algorithms is the difficulty in obtaining high-quality depth data that corresponds to collected RGB images. Collecting this data is time-consuming and costly, and even data collected by modern sensors has limited range or resolution, and is subject to inconsistencies and noise. To combat this, we propose a method of data generation in simulation using 3D synthetic environments and CycleGAN domain transfer. We compare this method of data generation to the popular NYUDepth V2 dataset by training a depth estimation model based on the DenseDepth structure using different training sets of real and simulated data. We evaluate the performance of the models on newly collected images and LiDAR depth data from a Husky robot to verify the generalizability of the approach and show that GAN-transformed data can serve as an effective alternative to real-world data, particularly in depth estimation.
Multi-Robot Target Tracking with Sensing and Communication Danger Zones
Apr 11, 2024Multi-robot target tracking finds extensive applications in different scenarios, such as environmental surveillance and wildfire management, which require the robustness of the practical deployment of multi-robot systems in uncertain and dangerous environments. Traditional approaches often focus on the performance of tracking accuracy with no modeling and assumption of the environments, neglecting potential environmental hazards which result in system failures in real-world deployments. To address this challenge, we investigate multi-robot target tracking in the adversarial environment considering sensing and communication attacks with uncertainty. We design specific strategies to avoid different danger zones and proposed a multi-agent tracking framework under the perilous environment. We approximate the probabilistic constraints and formulate practical optimization strategies to address computational challenges efficiently. We evaluate the performance of our proposed methods in simulations to demonstrate the ability of robots to adjust their risk-aware behaviors under different levels of environmental uncertainty and risk confidence. The proposed method is further validated via real-world robot experiments where a team of drones successfully track dynamic ground robots while being risk-aware of the sensing and/or communication danger zones.
Challenges Faced by Large Language Models in Solving Multi-Agent Flocking
Apr 06, 2024



Flocking is a behavior where multiple agents in a system attempt to stay close to each other while avoiding collision and maintaining a desired formation. This is observed in the natural world and has applications in robotics, including natural disaster search and rescue, wild animal tracking, and perimeter surveillance and patrol. Recently, large language models (LLMs) have displayed an impressive ability to solve various collaboration tasks as individual decision-makers. Solving multi-agent flocking with LLMs would demonstrate their usefulness in situations requiring spatial and decentralized decision-making. Yet, when LLM-powered agents are tasked with implementing multi-agent flocking, they fall short of the desired behavior. After extensive testing, we find that agents with LLMs as individual decision-makers typically opt to converge on the average of their initial positions or diverge from each other. After breaking the problem down, we discover that LLMs cannot understand maintaining a shape or keeping a distance in a meaningful way. Solving multi-agent flocking with LLMs would enhance their ability to understand collaborative spatial reasoning and lay a foundation for addressing more complex multi-agent tasks. This paper discusses the challenges LLMs face in multi-agent flocking and suggests areas for future improvement and research.
Double Oracle Algorithm for Game-Theoretic Robot Allocation on Graphs
Dec 19, 2023We study the problem of game-theoretic robot allocation where two players strategically allocate robots to compete for multiple sites of interest. Robots possess offensive or defensive capabilities to interfere and weaken their opponents to take over a competing site. This problem belongs to the conventional Colonel Blotto Game. Considering the robots' heterogeneous capabilities and environmental factors, we generalize the conventional Blotto game by incorporating heterogeneous robot types and graph constraints that capture the robot transitions between sites. Then we employ the Double Oracle Algorithm (DOA) to solve for the Nash equilibrium of the generalized Blotto game. Particularly, for cyclic-dominance-heterogeneous (CDH) robots that inhibit each other, we define a new transformation rule between any two robot types. Building on the transformation, we design a novel utility function to measure the game's outcome quantitatively. Moreover, we rigorously prove the correctness of the designed utility function. Finally, we conduct extensive simulations to demonstrate the effectiveness of DOA on computing Nash equilibrium for homogeneous, linear heterogeneous, and CDH robot allocation on graphs.
Dynamic Adversarial Attacks on Autonomous Driving Systems
Dec 10, 2023This paper introduces an attacking mechanism to challenge the resilience of autonomous driving systems. Specifically, we manipulate the decision-making processes of an autonomous vehicle by dynamically displaying adversarial patches on a screen mounted on another moving vehicle. These patches are optimized to deceive the object detection models into misclassifying targeted objects, e.g., traffic signs. Such manipulation has significant implications for critical multi-vehicle interactions such as intersection crossing and lane changing, which are vital for safe and efficient autonomous driving systems. Particularly, we make four major contributions. First, we introduce a novel adversarial attack approach where the patch is not co-located with its target, enabling more versatile and stealthy attacks. Moreover, our method utilizes dynamic patches displayed on a screen, allowing for adaptive changes and movement, enhancing the flexibility and performance of the attack. To do so, we design a Screen Image Transformation Network (SIT-Net), which simulates environmental effects on the displayed images, narrowing the gap between simulated and real-world scenarios. Further, we integrate a positional loss term into the adversarial training process to increase the success rate of the dynamic attack. Finally, we shift the focus from merely attacking perceptual systems to influencing the decision-making algorithms of self-driving systems. Our experiments demonstrate the first successful implementation of such dynamic adversarial attacks in real-world autonomous driving scenarios, paving the way for advancements in the field of robust and secure autonomous driving.
Monte-Carlo Tree Search for Behavior Planning in Autonomous Driving
Oct 18, 2023The integration of autonomous vehicles into urban and highway environments necessitates the development of robust and adaptable behavior planning systems. This study presents an innovative approach to address this challenge by utilizing a Monte-Carlo Tree Search (MCTS) based algorithm for autonomous driving behavior planning. The core objective is to leverage the balance between exploration and exploitation inherent in MCTS to facilitate intelligent driving decisions in complex scenarios. We introduce an MCTS-based algorithm tailored to the specific demands of autonomous driving. This involves the integration of carefully crafted cost functions, encompassing safety, comfort, and passability metrics, into the MCTS framework. The effectiveness of our approach is demonstrated by enabling autonomous vehicles to navigate intricate scenarios, such as intersections, unprotected left turns, cut-ins, and ramps, even under traffic congestion, in real-time. Qualitative instances illustrate the integration of diverse driving decisions, such as lane changes, acceleration, and deceleration, into the MCTS framework. Moreover, quantitative results, derived from examining the impact of iteration time and look-ahead steps on decision quality and real-time applicability, substantiate the robustness of our approach. This robustness is further underscored by the high success rate of the MCTS algorithm across various scenarios.
Learning Decentralized Flocking Controllers with Spatio-Temporal Graph Neural Network
Oct 02, 2023Recently a line of researches has delved the use of graph neural networks (GNNs) for decentralized control in swarm robotics. However, it has been observed that relying solely on the states of immediate neighbors is insufficient to imitate a centralized control policy. To address this limitation, prior studies proposed incorporating $L$-hop delayed states into the computation. While this approach shows promise, it can lead to a lack of consensus among distant flock members and the formation of small clusters, consequently resulting in the failure of cohesive flocking behaviors. Instead, our approach leverages spatiotemporal GNN, named STGNN that encompasses both spatial and temporal expansions. The spatial expansion collects delayed states from distant neighbors, while the temporal expansion incorporates previous states from immediate neighbors. The broader and more comprehensive information gathered from both expansions results in more effective and accurate predictions. We develop an expert algorithm for controlling a swarm of robots and employ imitation learning to train our decentralized STGNN model based on the expert algorithm. We simulate the proposed STGNN approach in various settings, demonstrating its decentralized capacity to emulate the global expert algorithm. Further, we implemented our approach to achieve cohesive flocking, leader following and obstacle avoidance by a group of Crazyflie drones. The performance of STGNN underscores its potential as an effective and reliable approach for achieving cohesive flocking, leader following and obstacle avoidance tasks.
Energy-Aware Routing Algorithm for Mobile Ground-to-Air Charging
Sep 30, 2023

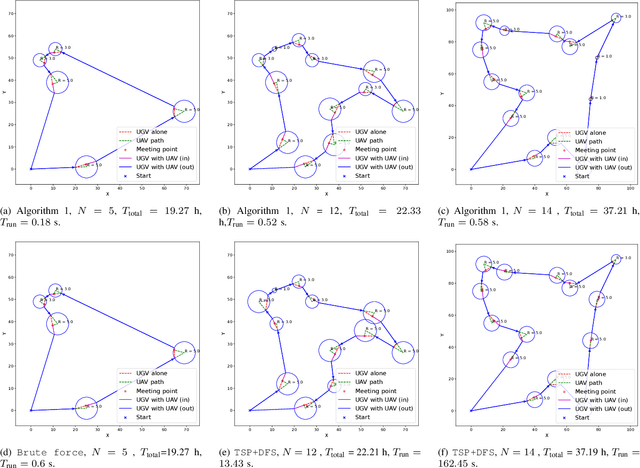
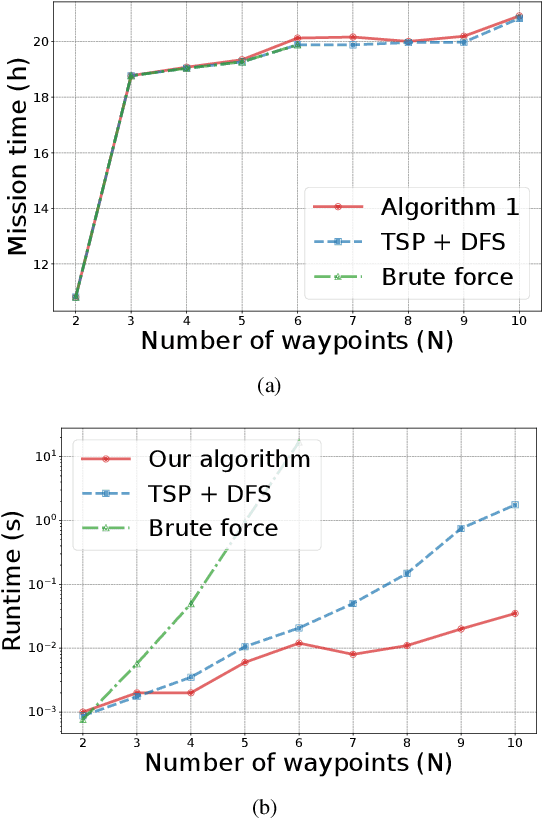
We investigate the problem of energy-constrained planning for a cooperative system of an Unmanned Ground Vehicles (UGV) and an Unmanned Aerial Vehicle (UAV). In scenarios where the UGV serves as a mobile base to ferry the UAV and as a charging station to recharge the UAV, we formulate a novel energy-constrained routing problem. To tackle this problem, we design an energy-aware routing algorithm, aiming to minimize the overall mission duration under the energy limitations of both vehicles. The algorithm first solves a Traveling Salesman Problem (TSP) to generate a guided tour. Then, it employs the Monte-Carlo Tree Search (MCTS) algorithm to refine the tour and generate paths for the two vehicles. We evaluate the performance of our algorithm through extensive simulations and a proof-of-concept experiment. The results show that our algorithm consistently achieves near-optimal mission time and maintains fast running time across a wide range of problem instances.
Context-Aware Entity Grounding with Open-Vocabulary 3D Scene Graphs
Sep 27, 2023We present an Open-Vocabulary 3D Scene Graph (OVSG), a formal framework for grounding a variety of entities, such as object instances, agents, and regions, with free-form text-based queries. Unlike conventional semantic-based object localization approaches, our system facilitates context-aware entity localization, allowing for queries such as ``pick up a cup on a kitchen table" or ``navigate to a sofa on which someone is sitting". In contrast to existing research on 3D scene graphs, OVSG supports free-form text input and open-vocabulary querying. Through a series of comparative experiments using the ScanNet dataset and a self-collected dataset, we demonstrate that our proposed approach significantly surpasses the performance of previous semantic-based localization techniques. Moreover, we highlight the practical application of OVSG in real-world robot navigation and manipulation experiments.
Assignment Algorithms for Multi-Robot Multi-Target Tracking with Sufficient and Limited Sensing Capability
Mar 08, 2023



We study the problem of assigning robots with actions to track targets. The objective is to optimize the robot team's tracking quality which can be defined as the reduction in the uncertainty of the targets' states. Specifically, we consider two assignment problems given the different sensing capabilities of the robots. In the first assignment problem, a single robot is sufficient to track a target. To this end, we present a greedy algorithm (Algorithm 1) that assigns a robot with its action to each target. We prove that the greedy algorithm has a 1/2 approximation bound and runs in polynomial time. Then, we study the second assignment problem where two robots are necessary to track a target. We design another greedy algorithm (Algorithm 2) that assigns a pair of robots with their actions to each target. We prove that the greedy algorithm achieves a 1/3 approximation bound and has a polynomial running time. Moreover, we illustrate the performance of the two greedy algorithms in the ROS-Gazebo environment where the tracking patterns of one robot following one target using Algorithm 1 and two robots following one target using Algorithm 2 are clearly observed. Further, we conduct extensive comparisons to demonstrate that the two greedy algorithms perform close to their optimal counterparts and much better than their respective (1/2 and 1/3) approximation bounds.