 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVijay Kumar
Multi-Robot Target Tracking with Sensing and Communication Danger Zones
Apr 11, 2024
Multi-robot target tracking finds extensive applications in different scenarios, such as environmental surveillance and wildfire management, which require the robustness of the practical deployment of multi-robot systems in uncertain and dangerous environments. Traditional approaches often focus on the performance of tracking accuracy with no modeling and assumption of the environments, neglecting potential environmental hazards which result in system failures in real-world deployments. To address this challenge, we investigate multi-robot target tracking in the adversarial environment considering sensing and communication attacks with uncertainty. We design specific strategies to avoid different danger zones and proposed a multi-agent tracking framework under the perilous environment. We approximate the probabilistic constraints and formulate practical optimization strategies to address computational challenges efficiently. We evaluate the performance of our proposed methods in simulations to demonstrate the ability of robots to adjust their risk-aware behaviors under different levels of environmental uncertainty and risk confidence. The proposed method is further validated via real-world robot experiments where a team of drones successfully track dynamic ground robots while being risk-aware of the sensing and/or communication danger zones.
An Active Perception Game for Robust Autonomous Exploration
Mar 31, 2024We formulate active perception for an autonomous agent that explores an unknown environment as a two-player zero-sum game: the agent aims to maximize information gained from the environment while the environment aims to minimize the information gained by the agent. In each episode, the environment reveals a set of actions with their potentially erroneous information gain. In order to select the best action, the robot needs to recover the true information gain from the erroneous one. The robot does so by minimizing the discrepancy between its estimate of information gain and the true information gain it observes after taking the action. We propose an online convex optimization algorithm that achieves sub-linear expected regret $O(T^{3/4})$ for estimating the information gain. We also provide a bound on the regret of active perception performed by any (near-)optimal prediction and trajectory selection algorithms. We evaluate this approach using semantic neural radiance fields (NeRFs) in simulated realistic 3D environments to show that the robot can discover up to 12% more objects using the improved estimate of the information gain. On the M3ED dataset, the proposed algorithm reduced the error of information gain prediction in occupancy map by over 67%. In real-world experiments using occupancy maps on a Jackal ground robot, we show that this approach can calculate complicated trajectories that efficiently explore all occluded regions.
Trajectory Optimization with Global Yaw Parameterization for Field-of-View Constrained Autonomous Flight
Mar 25, 2024Trajectory generation for quadrotors with limited field-of-view sensors has numerous applications such as aerial exploration, coverage, inspection, videography, and target tracking. Most previous works simplify the task of optimizing yaw trajectories by either aligning the heading of the robot with its velocity, or potentially restricting the feasible space of candidate trajectories by using a limited yaw domain to circumvent angular singularities. In this paper, we propose a novel \textit{global} yaw parameterization method for trajectory optimization that allows a 360-degree yaw variation as demanded by the underlying algorithm. This approach effectively bypasses inherent singularities by including supplementary quadratic constraints and transforming the final decision variables into the desired state representation. This method significantly reduces the needed control effort, and improves optimization feasibility. Furthermore, we apply the method to several examples of different applications that require jointly optimizing over both the yaw and position trajectories. Ultimately, we present a comprehensive numerical analysis and evaluation of our proposed method in both simulation and real-world experiments.
Medical Image Data Provenance for Medical Cyber-Physical System
Mar 22, 2024Continuous advancements in medical technology have led to the creation of affordable mobile imaging devices suitable for telemedicine and remote monitoring. However, the rapid examination of large populations poses challenges, including the risk of fraudulent practices by healthcare professionals and social workers exchanging unverified images via mobile applications. To mitigate these risks, this study proposes using watermarking techniques to embed a device fingerprint (DFP) into captured images, ensuring data provenance. The DFP, representing the unique attributes of the capturing device and raw image, is embedded into raw images before storage, thus enabling verification of image authenticity and source. Moreover, a robust remote validation method is introduced to authenticate images, enhancing the integrity of medical image data in interconnected healthcare systems. Through a case study on mobile fundus imaging, the effectiveness of the proposed framework is evaluated in terms of computational efficiency, image quality, security, and trustworthiness. This approach is suitable for a range of applications, including telemedicine, the Internet of Medical Things (IoMT), eHealth, and Medical Cyber-Physical Systems (MCPS) applications, providing a reliable means to maintain data provenance in diagnostic settings utilizing medical images or videos.
Almost Global Asymptotic Trajectory Tracking for Fully-Actuated Mechanical Systems on Homogeneous Riemannian Manifolds
Mar 07, 2024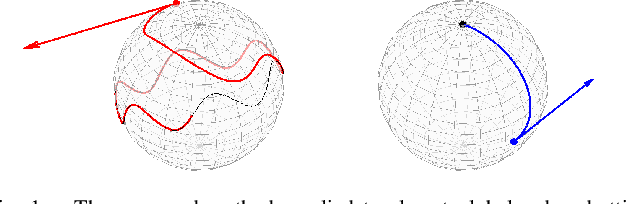
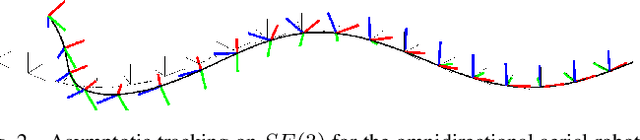
In this work, we address the design of tracking controllers that drive a mechanical system's state asymptotically towards a reference trajectory. Motivated by aerospace and robotics applications, we consider fully-actuated systems evolving on the broad class of homogeneous spaces (encompassing all vector spaces, Lie groups, and spheres of any dimension). In this setting, the transitive action of a Lie group on the configuration manifold enables an intrinsic description of the tracking error as an element of the state space, even in the absence of a group structure on the configuration manifold itself (e.g., for $\mathbb{S}^2$). Such an error state facilitates the design of a generalized control policy depending smoothly on state and time that drives this geometric tracking error to a designated origin from almost every initial condition, thereby guaranteeing almost global convergence to the reference trajectory. Moreover, the proposed controller simplifies naturally when specialized to a Lie group or the $n$-sphere. In summary, we propose a unified, intrinsic controller guaranteeing almost global asymptotic trajectory tracking for fully-actuated mechanical systems evolving on a broader class of manifolds. We apply the method to an axisymmetric satellite and an omnidirectional aerial robot.
Astigmatic Speckle-learned OAM Shift Keying and OAM Multiplexing
Feb 09, 2024Orbital angular momentum (OAM)-carrying beams have gained significant attention in recent years due to their unique properties and potential to improve spectral efficiency and data transmission rates in optical communication systems. However, fully exploiting the capabilities of the entire OAM mode spectrum remains challenging. The emergence of AI-driven OAM mode identification has revolutionized the demultiplexing process within optical communication channels. OAM beams with different orders are orthogonal, allowing each beam to serve as a distinct signal carrier. Combining multiple OAM beams can effectively enhance channel capacity. In this paper, we adopt speckle-learned demultiplexing to demultiplex OAM beams via its speckle pattern that is more resilient to alignment and noise. However, the use of only non-intensity degenerate beams limits the utilization of multiplexing resources. This approach aims to fully leverage the full spectrum of OAM beams by introducing astigmatism in far-field speckle patterns using a tilted spherical convex lens. We then conduct a comprehensive analysis of two innovative information encoding techniques: OAM shift keying and OAM multiplexing. We successfully demonstrate an optical communication link encoded using both OAM shift keying and OAM multiplexing, followed by accurate decoding via speckle-learned demultiplexing.
LPAC: Learnable Perception-Action-Communication Loops with Applications to Coverage Control
Jan 18, 2024Coverage control is the problem of navigating a robot swarm to collaboratively monitor features or a phenomenon of interest not known a priori. The problem is challenging in decentralized settings with robots that have limited communication and sensing capabilities. We propose a learnable Perception-Action-Communication (LPAC) architecture for the problem, wherein a convolution neural network (CNN) processes localized perception; a graph neural network (GNN) facilitates robot communications; finally, a shallow multi-layer perceptron (MLP) computes robot actions. The GNN enables collaboration in the robot swarm by computing what information to communicate with nearby robots and how to incorporate received information. Evaluations show that the LPAC models -- trained using imitation learning -- outperform standard decentralized and centralized coverage control algorithms. The learned policy generalizes to environments different from the training dataset, transfers to larger environments with more robots, and is robust to noisy position estimates. The results indicate the suitability of LPAC architectures for decentralized navigation in robot swarms to achieve collaborative behavior.
Why Change Your Controller When You Can Change Your Planner: Drag-Aware Trajectory Generation for Quadrotor Systems
Jan 10, 2024Motivated by the increasing use of quadrotors for payload delivery, we consider a joint trajectory generation and feedback control design problem for a quadrotor experiencing aerodynamic wrenches. Unmodeled aerodynamic drag forces from carried payloads can lead to catastrophic outcomes. Prior work model aerodynamic effects as residual dynamics or external disturbances in the control problem leading to a reactive policy that could be catastrophic. Moreover, redesigning controllers and tuning control gains on hardware platforms is a laborious effort. In this paper, we argue that adapting the trajectory generation component keeping the controller fixed can improve trajectory tracking for quadrotor systems experiencing drag forces. To achieve this, we formulate a drag-aware planning problem by applying a suitable relaxation to an optimal quadrotor control problem, introducing a tracking cost function which measures the ability of a controller to follow a reference trajectory. This tracking cost function acts as a regularizer in trajectory generation and is learned from data obtained from simulation. Our experiments in both simulation and on the Crazyflie hardware platform show that changing the planner reduces tracking error by as much as 83%. Evaluation on hardware demonstrates that our planned path, as opposed to a baseline, avoids controller saturation and catastrophic outcomes during aggressive maneuvers.
EvDNeRF: Reconstructing Event Data with Dynamic Neural Radiance Fields
Oct 03, 2023We present EvDNeRF, a pipeline for generating event data and training an event-based dynamic NeRF, for the purpose of faithfully reconstructing eventstreams on scenes with rigid and non-rigid deformations that may be too fast to capture with a standard camera. Event cameras register asynchronous per-pixel brightness changes at MHz rates with high dynamic range, making them ideal for observing fast motion with almost no motion blur. Neural radiance fields (NeRFs) offer visual-quality geometric-based learnable rendering, but prior work with events has only considered reconstruction of static scenes. Our EvDNeRF can predict eventstreams of dynamic scenes from a static or moving viewpoint between any desired timestamps, thereby allowing it to be used as an event-based simulator for a given scene. We show that by training on varied batch sizes of events, we can improve test-time predictions of events at fine time resolutions, outperforming baselines that pair standard dynamic NeRFs with event simulators. We release our simulated and real datasets, as well as code for both event-based data generation and the training of event-based dynamic NeRF models (https://github.com/anish-bhattacharya/EvDNeRF).