 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMahdi Tavakoli
A Realistic Surgical Simulator for Non-Rigid and Contact-Rich Manipulation in Surgeries with the da Vinci Research Kit
Apr 08, 2024
Realistic real-time surgical simulators play an increasingly important role in surgical robotics research, such as surgical robot learning and automation, and surgical skills assessment. Although there are a number of existing surgical simulators for research, they generally lack the ability to simulate the diverse types of objects and contact-rich manipulation tasks typically present in surgeries, such as tissue cutting and blood suction. In this work, we introduce CRESSim, a realistic surgical simulator based on PhysX 5 for the da Vinci Research Kit (dVRK) that enables simulating various contact-rich surgical tasks involving different surgical instruments, soft tissue, and body fluids. The real-world dVRK console and the master tool manipulator (MTM) robots are incorporated into the system to allow for teleoperation through virtual reality (VR). To showcase the advantages and potentials of the simulator, we present three examples of surgical tasks, including tissue grasping and deformation, blood suction, and tissue cutting. These tasks are performed using the simulated surgical instruments, including the large needle driver, suction irrigator, and curved scissor, through VR-based teleoperation.
Speech-Based Human-Exoskeleton Interaction for Lower Limb Motion Planning
Oct 04, 2023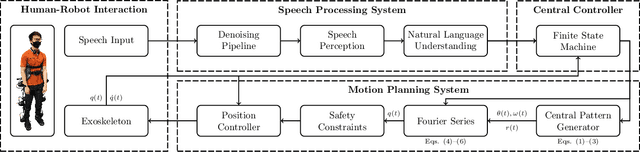
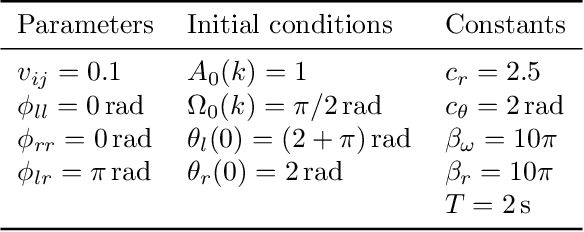
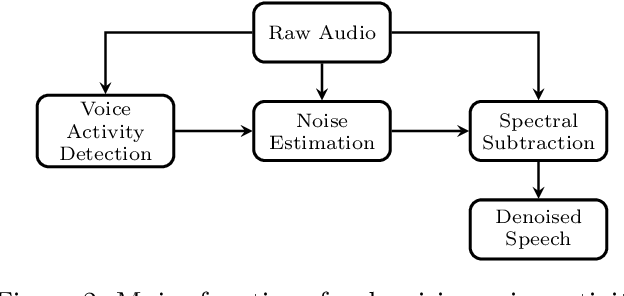
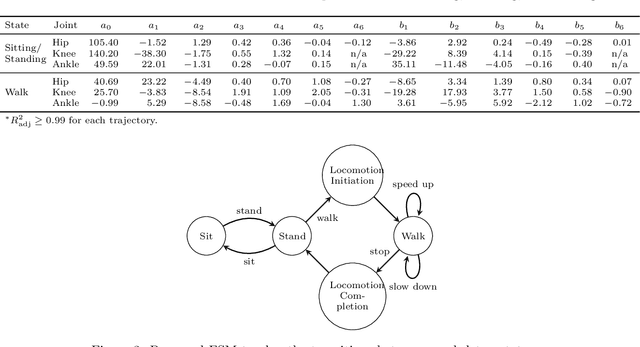
This study presents a speech-based motion planning strategy (SBMP) developed for lower limb exoskeletons to facilitate safe and compliant human-robot interaction. A speech processing system, finite state machine, and central pattern generator are the building blocks of the proposed strategy for online planning of the exoskeleton's trajectory. According to experimental evaluations, this speech-processing system achieved low levels of word and intent errors. Regarding locomotion, the completion time for users with voice commands was 54% faster than that using a mobile app interface. With the proposed SBMP, users are able to maintain their postural stability with both hands-free. This supports its use as an effective motion planning method for the assistance and rehabilitation of individuals with lower-limb impairments.
Sim-to-Real Surgical Robot Learning and Autonomous Planning for Internal Tissue Points Manipulation using Reinforcement Learning
Jun 25, 2023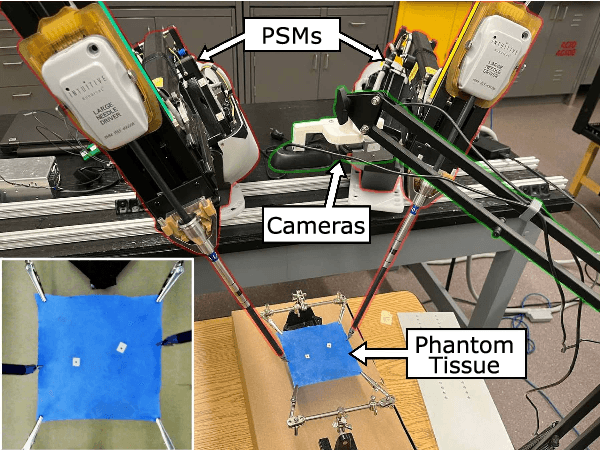
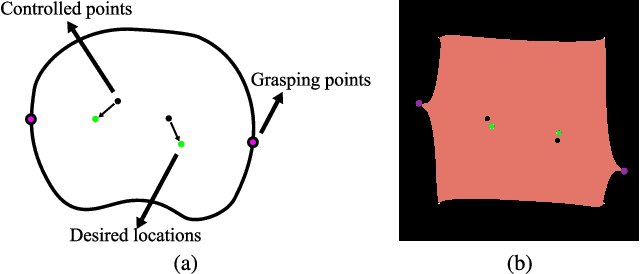

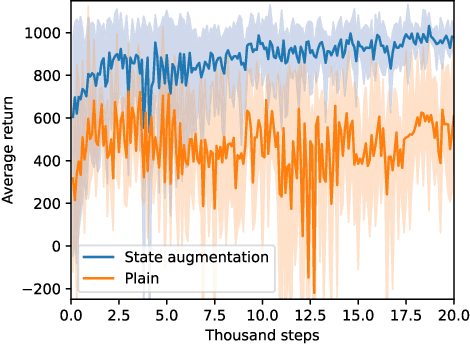
Indirect simultaneous positioning (ISP), where internal tissue points are placed at desired locations indirectly through the manipulation of boundary points, is a type of subtask frequently performed in robotic surgeries. Although challenging due to complex tissue dynamics, automating the task can potentially reduce the workload of surgeons. This paper presents a sim-to-real framework for learning to automate the task without interacting with a real environment, and for planning preoperatively to find the grasping points that minimize local tissue deformation. A control policy is learned using deep reinforcement learning (DRL) in the FEM-based simulation environment and transferred to real-world situation. Grasping points are planned in the simulator by utilizing the trained policy using Bayesian optimization (BO). Inconsistent simulation performance is overcome by formulating the problem as a state augmented Markov decision process (MDP). Experimental results show that the learned policy places the internal tissue points accurately, and that the planned grasping points yield small tissue deformation among the trials. The proposed learning and planning scheme is able to automate internal tissue point manipulation in surgeries and has the potential to be generalized to complex surgical scenarios.
* 8 pages, 8 figures
Adaptive tracking control for task-based robot trajectory planning
Oct 14, 2020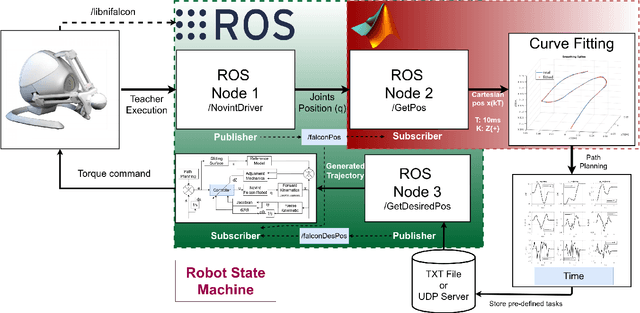

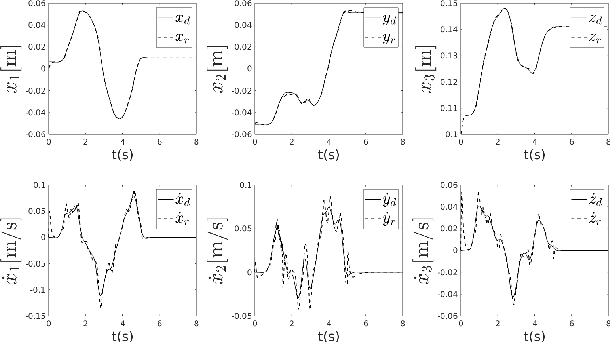
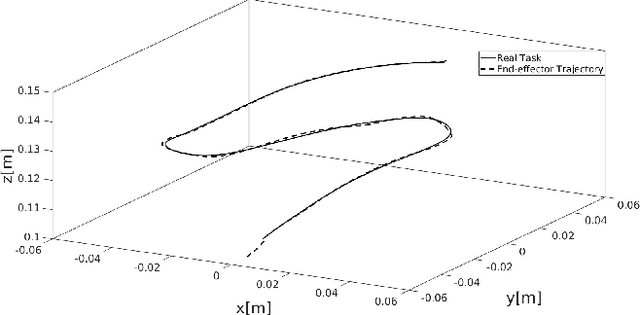
This paper presents a -- Learning from Demonstration -- method to perform robot movement trajectories that can be defined as you go. This way unstructured tasks can be performed, without the need to know exactly all the tasks and start and end positions beforehand. The long-term goal is for children with disabilities to be able to control a robot to manipulate toys in a play environment, and for a helper to demonstrate the desired trajectories as the play tasks change. A relatively inexpensive 3-DOF haptic device made by Novint is used to perform tasks where trajectories of the end-effector are demonstrated and reproduced. Under the condition where the end-effector carries different loads, conventional control systems possess the potential issue that they cannot compensate for the load variation effect. Adaptive tracking control can handle the above issue. Using the Lyapunov stability theory, a set of update laws are derived to give closed-loop stability with proper tracking performance.