 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMohamed Mohamed
Real-Time Diagnostic Integrity Meets Efficiency: A Novel Platform-Agnostic Architecture for Physiological Signal Compression
Jan 04, 2024
Head-based signals such as EEG, EMG, EOG, and ECG collected by wearable systems will play a pivotal role in clinical diagnosis, monitoring, and treatment of important brain disorder diseases. However, the real-time transmission of the significant corpus physiological signals over extended periods consumes substantial power and time, limiting the viability of battery-dependent physiological monitoring wearables. This paper presents a novel deep-learning framework employing a variational autoencoder (VAE) for physiological signal compression to reduce wearables' computational complexity and energy consumption. Our approach achieves an impressive compression ratio of 1:293 specifically for spectrogram data, surpassing state-of-the-art compression techniques such as JPEG2000, H.264, Direct Cosine Transform (DCT), and Huffman Encoding, which do not excel in handling physiological signals. We validate the efficacy of the compressed algorithms using collected physiological signals from real patients in the Hospital and deploy the solution on commonly used embedded AI chips (i.e., ARM Cortex V8 and Jetson Nano). The proposed framework achieves a 91% seizure detection accuracy using XGBoost, confirming the approach's reliability, practicality, and scalability.
A Soft High Force Hand Exoskeleton for Rehabilitation and Assistance of Spinal Cord Injury and Stroke Individuals
Feb 19, 2019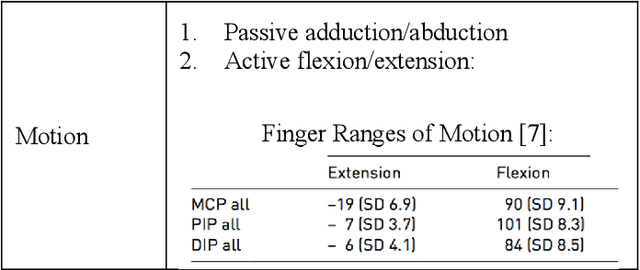
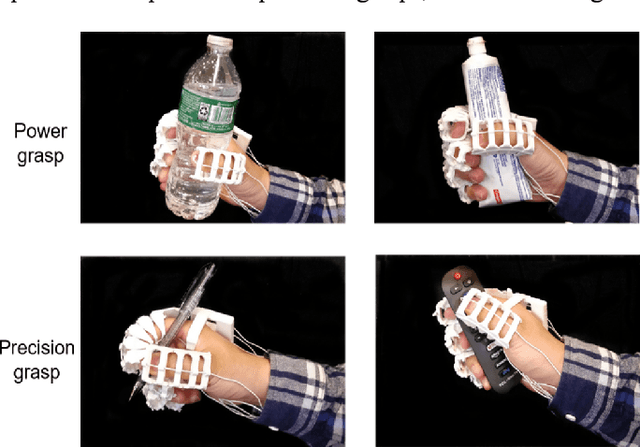
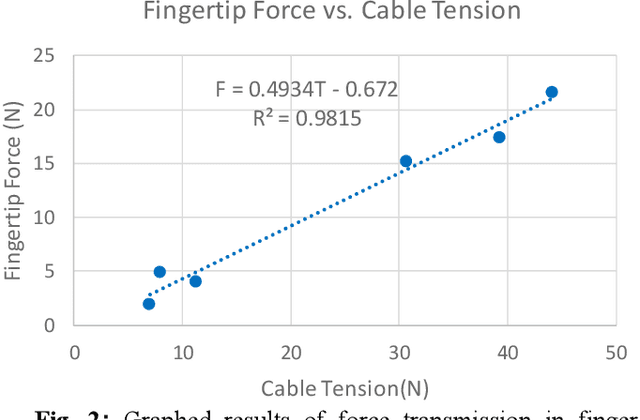
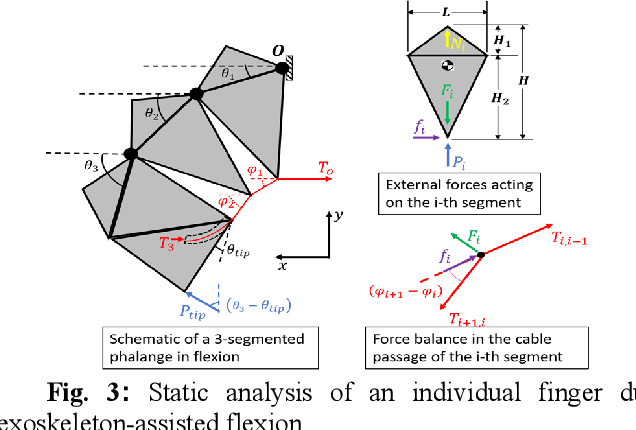
Individuals with spinal cord injury (SCI) and stroke who is lack of manipulation capability have a particular need for robotic hand exoskeletons. Among assistive and rehabilitative medical exoskeletons, there exists a sharp trade-off between device power on the one hand and ergonomics and portability on other, devices that provide stronger grasping assistance do so at the cost of patient comfort. This paper proposes using fin-ray inspired, cable-driven finger orthoses to generate high fingertip forces without the painful compressive and shear stresses commonly associated with conventional cable-drive exoskeletons. With combination cable-driven transmission and segmented-finger orthoses, the exoskeleton transmitted larger forces and applied torques discretely to the fingers, leading to strong fingertip forces. A prototype of the finger orthoses and associated cable transmission was fabricated, and force transmission tests of the prototype in the finger flexion mode demonstrated a 2:1 input-output ratio between cable tension and fingertip force, with a maximum fingertip force of 22 N. Moreover, the proposed design provides a comfortable experience for wearers thanks to its lightweight and conformal properties to the hands.