 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQiayuan Liao
Leveraging Symmetry in RL-based Legged Locomotion Control
Mar 27, 2024
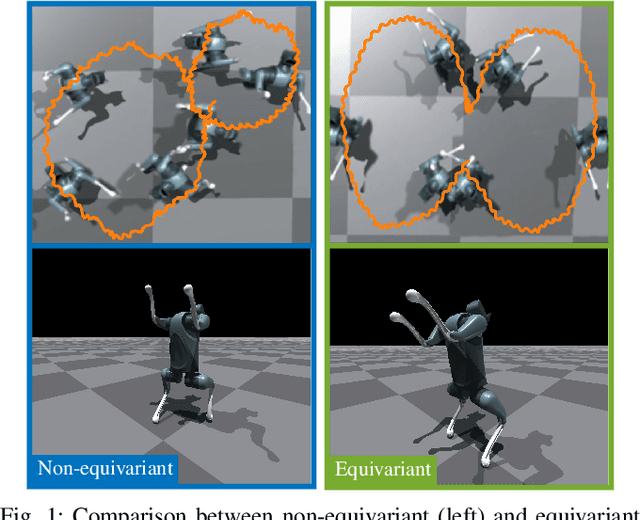
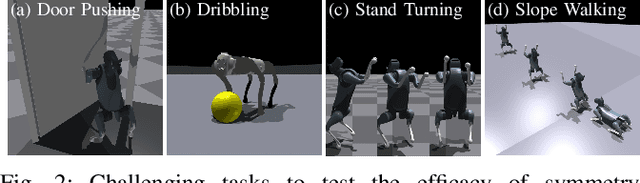

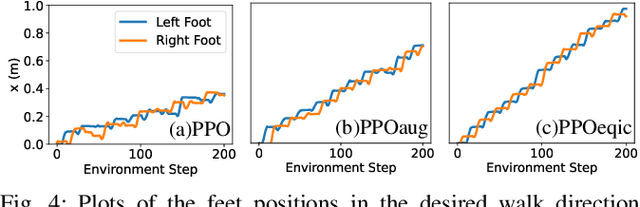
Model-free reinforcement learning is a promising approach for autonomously solving challenging robotics control problems, but faces exploration difficulty without information of the robot's kinematics and dynamics morphology. The under-exploration of multiple modalities with symmetric states leads to behaviors that are often unnatural and sub-optimal. This issue becomes particularly pronounced in the context of robotic systems with morphological symmetries, such as legged robots for which the resulting asymmetric and aperiodic behaviors compromise performance, robustness, and transferability to real hardware. To mitigate this challenge, we can leverage symmetry to guide and improve the exploration in policy learning via equivariance/invariance constraints. In this paper, we investigate the efficacy of two approaches to incorporate symmetry: modifying the network architectures to be strictly equivariant/invariant, and leveraging data augmentation to approximate equivariant/invariant actor-critics. We implement the methods on challenging loco-manipulation and bipedal locomotion tasks and compare with an unconstrained baseline. We find that the strictly equivariant policy consistently outperforms other methods in sample efficiency and task performance in simulation. In addition, symmetry-incorporated approaches exhibit better gait quality, higher robustness and can be deployed zero-shot in real-world experiments.
Walking in Narrow Spaces: Safety-critical Locomotion Control for Quadrupedal Robots with Duality-based Optimization
Dec 29, 2022



This paper presents a safety-critical locomotion control framework for quadrupedal robots. Our goal is to enable quadrupedal robots to safely navigate in cluttered environments. To tackle this, we introduce exponential Discrete Control Barrier Functions (exponential DCBFs) with duality-based obstacle avoidance constraints into a Nonlinear Model Predictive Control (NMPC) with Whole-Body Control (WBC) framework for quadrupedal locomotion control. This enables us to use polytopes to describe the shapes of the robot and obstacles for collision avoidance while doing locomotion control of quadrupedal robots. Compared to most prior work, especially using CBFs, that utilize spherical and conservative approximation for obstacle avoidance, this work demonstrates a quadrupedal robot autonomously and safely navigating through very tight spaces in the real world. (Our open-source code is available at github.com/HybridRobotics/quadruped_nmpc_dcbf_duality, and the video is available at youtu.be/p1gSQjwXm1Q.)
Real-time Trajectory Optimization and Control for Ball Bumping with Quadruped Robots
Oct 11, 2022



This paper studies real-time motion planning and control for ball bumping motion with quadruped robots. To enable the quadruped to bump the flying ball with different initializations, we develop a nonlinear trajectory optimization-based planning scheme that jointly identifies the take-off time and state to achieve accurate ball hitting during the flight phase. Such a planning scheme employs a two-dimensional single rigid body model that achieves a satisfactory balance between accuracy and efficiency for the highly time-sensitive task. To precisely execute the planned motion, the tracking controller needs to incorporate the strict time-state constraint imposed on the take-off and ball-hitting events. To this end, we develop an improved model predictive controller that respects the critical time-state constraints. The proposed planning and control framework is validated with a real Aliengo robot. Experiments show that the problem planning approach can be computed in approximately 60ms on average, enabling successful accomplishment of the ball bumping motion with various initializations in real time.
Review of Quadruped Robots for Dynamic Locomotion
May 05, 2020



This review introduces quadruped robots: MITCheetah, HyQ, ANYmal, BigDog, and their mechanical structure, actuation, and control.