 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisheek Garrepalli
SciFlow: Empowering Lightweight Optical Flow Models with Self-Cleaning Iterations
Apr 11, 2024
Optical flow estimation is crucial to a variety of vision tasks. Despite substantial recent advancements, achieving real-time on-device optical flow estimation remains a complex challenge. First, an optical flow model must be sufficiently lightweight to meet computation and memory constraints to ensure real-time performance on devices. Second, the necessity for real-time on-device operation imposes constraints that weaken the model's capacity to adequately handle ambiguities in flow estimation, thereby intensifying the difficulty of preserving flow accuracy. This paper introduces two synergistic techniques, Self-Cleaning Iteration (SCI) and Regression Focal Loss (RFL), designed to enhance the capabilities of optical flow models, with a focus on addressing optical flow regression ambiguities. These techniques prove particularly effective in mitigating error propagation, a prevalent issue in optical flow models that employ iterative refinement. Notably, these techniques add negligible to zero overhead in model parameters and inference latency, thereby preserving real-time on-device efficiency. The effectiveness of our proposed SCI and RFL techniques, collectively referred to as SciFlow for brevity, is demonstrated across two distinct lightweight optical flow model architectures in our experiments. Remarkably, SciFlow enables substantial reduction in error metrics (EPE and Fl-all) over the baseline models by up to 6.3% and 10.5% for in-domain scenarios and by up to 6.2% and 13.5% for cross-domain scenarios on the Sintel and KITTI 2015 datasets, respectively.
OCAI: Improving Optical Flow Estimation by Occlusion and Consistency Aware Interpolation
Mar 26, 2024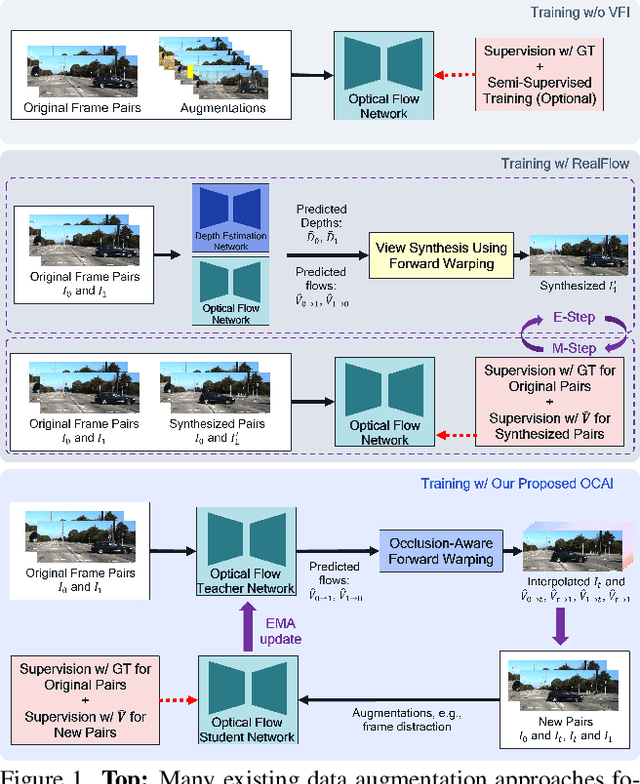
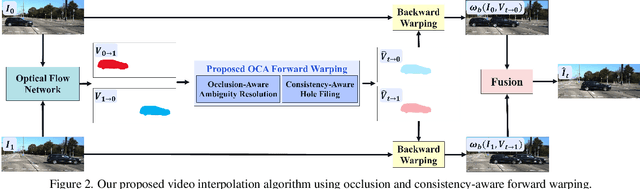
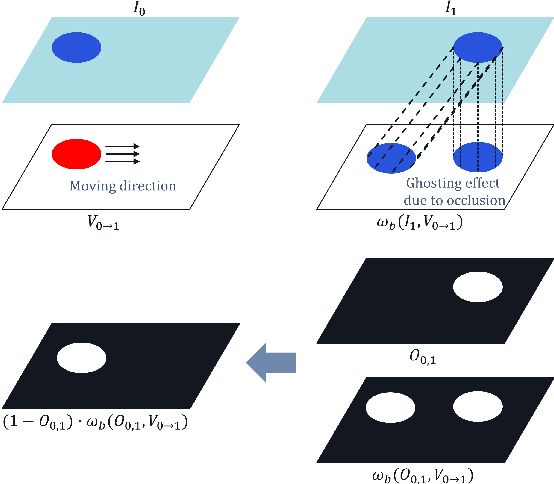
The scarcity of ground-truth labels poses one major challenge in developing optical flow estimation models that are both generalizable and robust. While current methods rely on data augmentation, they have yet to fully exploit the rich information available in labeled video sequences. We propose OCAI, a method that supports robust frame interpolation by generating intermediate video frames alongside optical flows in between. Utilizing a forward warping approach, OCAI employs occlusion awareness to resolve ambiguities in pixel values and fills in missing values by leveraging the forward-backward consistency of optical flows. Additionally, we introduce a teacher-student style semi-supervised learning method on top of the interpolated frames. Using a pair of unlabeled frames and the teacher model's predicted optical flow, we generate interpolated frames and flows to train a student model. The teacher's weights are maintained using Exponential Moving Averaging of the student. Our evaluations demonstrate perceptually superior interpolation quality and enhanced optical flow accuracy on established benchmarks such as Sintel and KITTI.
FutureDepth: Learning to Predict the Future Improves Video Depth Estimation
Mar 19, 2024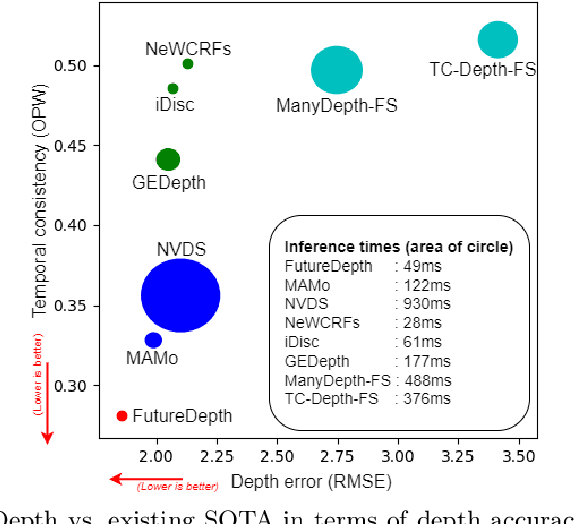
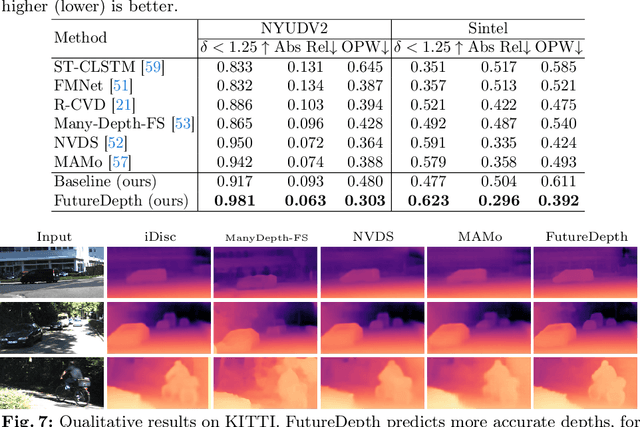
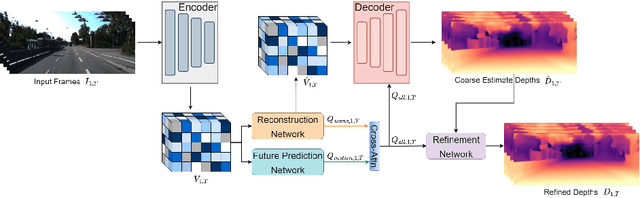
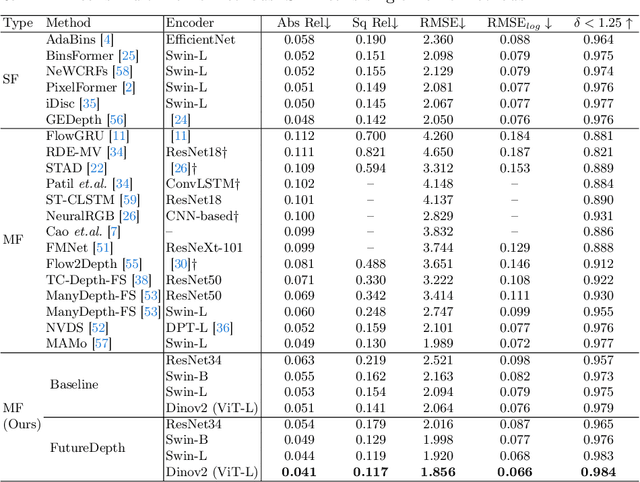
In this paper, we propose a novel video depth estimation approach, FutureDepth, which enables the model to implicitly leverage multi-frame and motion cues to improve depth estimation by making it learn to predict the future at training. More specifically, we propose a future prediction network, F-Net, which takes the features of multiple consecutive frames and is trained to predict multi-frame features one time step ahead iteratively. In this way, F-Net learns the underlying motion and correspondence information, and we incorporate its features into the depth decoding process. Additionally, to enrich the learning of multiframe correspondence cues, we further leverage a reconstruction network, R-Net, which is trained via adaptively masked auto-encoding of multiframe feature volumes. At inference time, both F-Net and R-Net are used to produce queries to work with the depth decoder, as well as a final refinement network. Through extensive experiments on several benchmarks, i.e., NYUDv2, KITTI, DDAD, and Sintel, which cover indoor, driving, and open-domain scenarios, we show that FutureDepth significantly improves upon baseline models, outperforms existing video depth estimation methods, and sets new state-of-the-art (SOTA) accuracy. Furthermore, FutureDepth is more efficient than existing SOTA video depth estimation models and has similar latencies when comparing to monocular models
Clockwork Diffusion: Efficient Generation With Model-Step Distillation
Dec 13, 2023This work aims to improve the efficiency of text-to-image diffusion models. While diffusion models use computationally expensive UNet-based denoising operations in every generation step, we identify that not all operations are equally relevant for the final output quality. In particular, we observe that UNet layers operating on high-res feature maps are relatively sensitive to small perturbations. In contrast, low-res feature maps influence the semantic layout of the final image and can often be perturbed with no noticeable change in the output. Based on this observation, we propose Clockwork Diffusion, a method that periodically reuses computation from preceding denoising steps to approximate low-res feature maps at one or more subsequent steps. For multiple baselines, and for both text-to-image generation and image editing, we demonstrate that Clockwork leads to comparable or improved perceptual scores with drastically reduced computational complexity. As an example, for Stable Diffusion v1.5 with 8 DPM++ steps we save 32% of FLOPs with negligible FID and CLIP change.
MAMo: Leveraging Memory and Attention for Monocular Video Depth Estimation
Jul 26, 2023
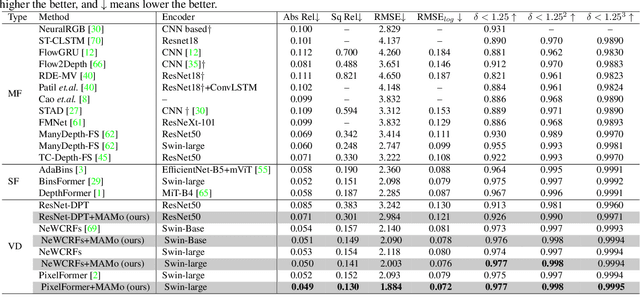
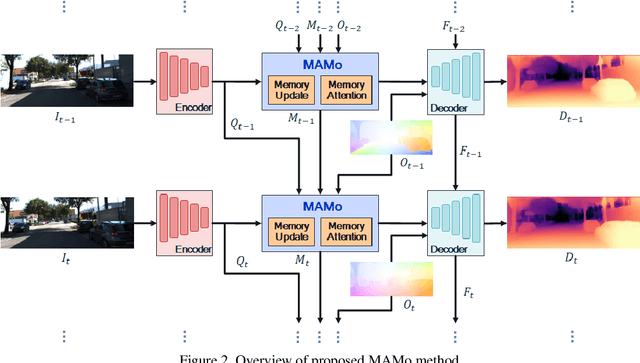

We propose MAMo, a novel memory and attention frame-work for monocular video depth estimation. MAMo can augment and improve any single-image depth estimation networks into video depth estimation models, enabling them to take advantage of the temporal information to predict more accurate depth. In MAMo, we augment model with memory which aids the depth prediction as the model streams through the video. Specifically, the memory stores learned visual and displacement tokens of the previous time instances. This allows the depth network to cross-reference relevant features from the past when predicting depth on the current frame. We introduce a novel scheme to continuously update the memory, optimizing it to keep tokens that correspond with both the past and the present visual information. We adopt attention-based approach to process memory features where we first learn the spatio-temporal relation among the resultant visual and displacement memory tokens using self-attention module. Further, the output features of self-attention are aggregated with the current visual features through cross-attention. The cross-attended features are finally given to a decoder to predict depth on the current frame. Through extensive experiments on several benchmarks, including KITTI, NYU-Depth V2, and DDAD, we show that MAMo consistently improves monocular depth estimation networks and sets new state-of-the-art (SOTA) accuracy. Notably, our MAMo video depth estimation provides higher accuracy with lower latency, when omparing to SOTA cost-volume-based video depth models.
DIFT: Dynamic Iterative Field Transforms for Memory Efficient Optical Flow
Jun 09, 2023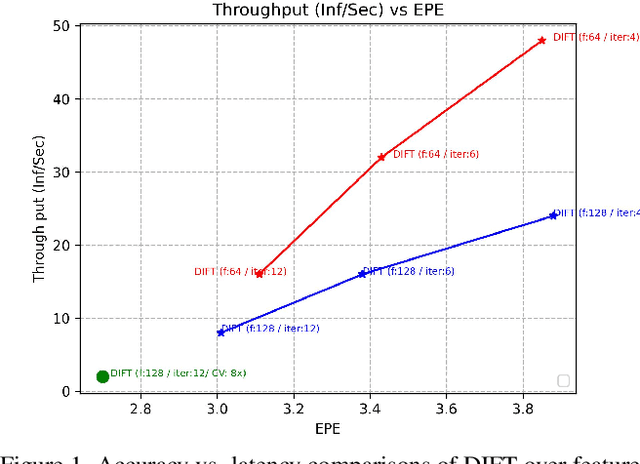
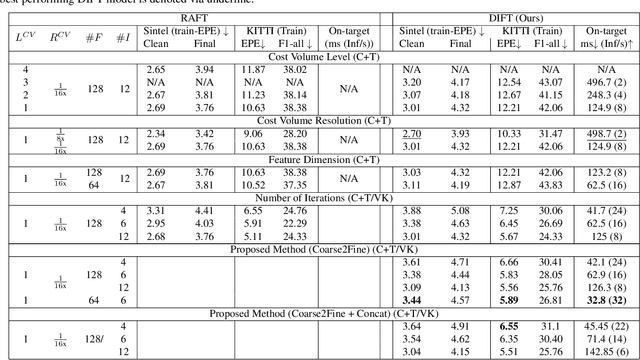
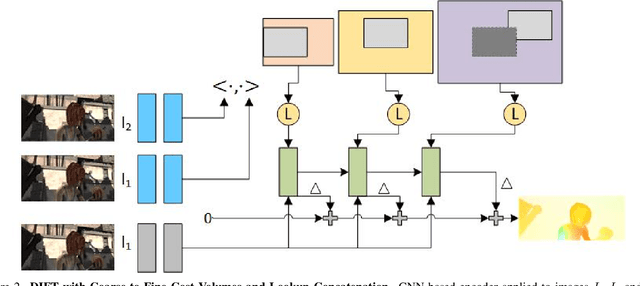

Recent advancements in neural network-based optical flow estimation often come with prohibitively high computational and memory requirements, presenting challenges in their model adaptation for mobile and low-power use cases. In this paper, we introduce a lightweight low-latency and memory-efficient model, Dynamic Iterative Field Transforms (DIFT), for optical flow estimation feasible for edge applications such as mobile, XR, micro UAVs, robotics and cameras. DIFT follows an iterative refinement framework leveraging variable resolution of cost volumes for correspondence estimation. We propose a memory efficient solution for cost volume processing to reduce peak memory. Also, we present a novel dynamic coarse-to-fine cost volume processing during various stages of refinement to avoid multiple levels of cost volumes. We demonstrate first real-time cost-volume based optical flow DL architecture on Snapdragon 8 Gen 1 HTP efficient mobile AI accelerator with 32 inf/sec and 5.89 EPE (endpoint error) on KITTI with manageable accuracy-performance tradeoffs.
DistractFlow: Improving Optical Flow Estimation via Realistic Distractions and Pseudo-Labeling
Mar 24, 2023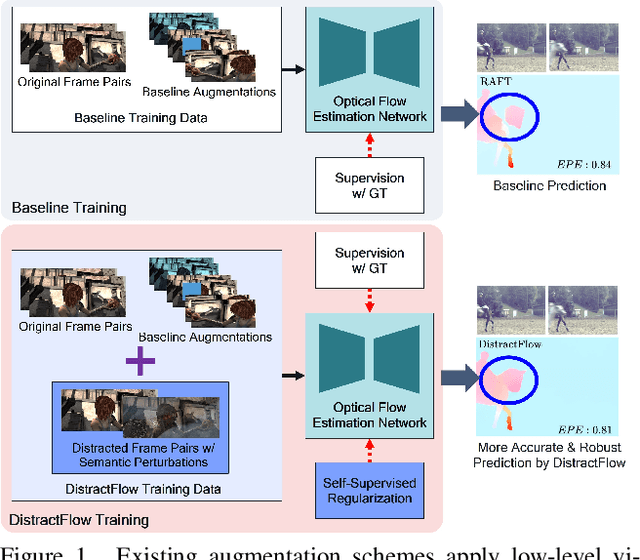
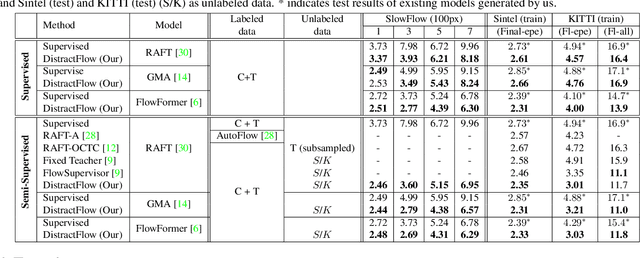
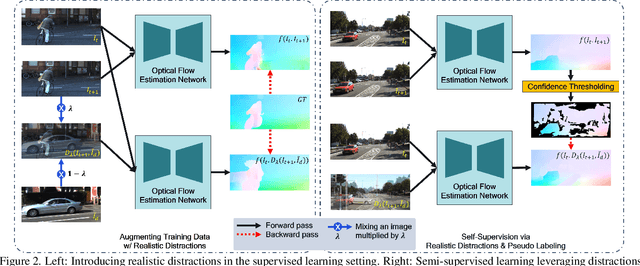
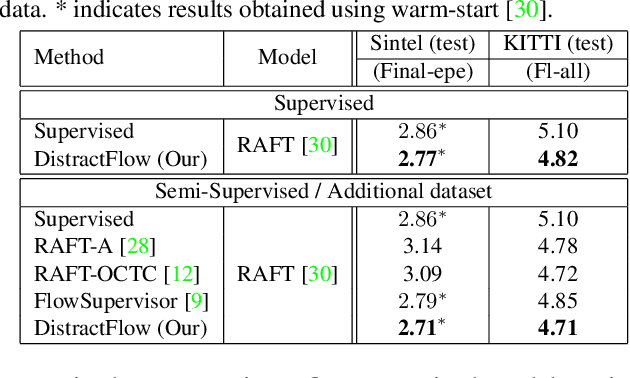
We propose a novel data augmentation approach, DistractFlow, for training optical flow estimation models by introducing realistic distractions to the input frames. Based on a mixing ratio, we combine one of the frames in the pair with a distractor image depicting a similar domain, which allows for inducing visual perturbations congruent with natural objects and scenes. We refer to such pairs as distracted pairs. Our intuition is that using semantically meaningful distractors enables the model to learn related variations and attain robustness against challenging deviations, compared to conventional augmentation schemes focusing only on low-level aspects and modifications. More specifically, in addition to the supervised loss computed between the estimated flow for the original pair and its ground-truth flow, we include a second supervised loss defined between the distracted pair's flow and the original pair's ground-truth flow, weighted with the same mixing ratio. Furthermore, when unlabeled data is available, we extend our augmentation approach to self-supervised settings through pseudo-labeling and cross-consistency regularization. Given an original pair and its distracted version, we enforce the estimated flow on the distracted pair to agree with the flow of the original pair. Our approach allows increasing the number of available training pairs significantly without requiring additional annotations. It is agnostic to the model architecture and can be applied to training any optical flow estimation models. Our extensive evaluations on multiple benchmarks, including Sintel, KITTI, and SlowFlow, show that DistractFlow improves existing models consistently, outperforming the latest state of the art.
DejaVu: Conditional Regenerative Learning to Enhance Dense Prediction
Mar 02, 2023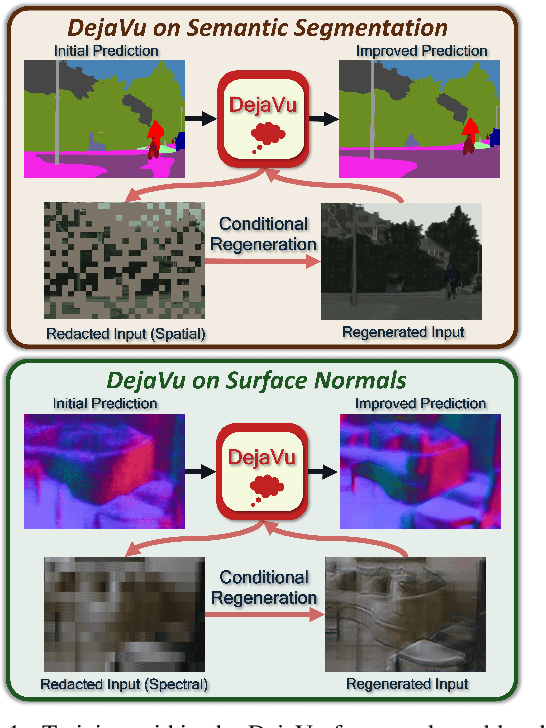

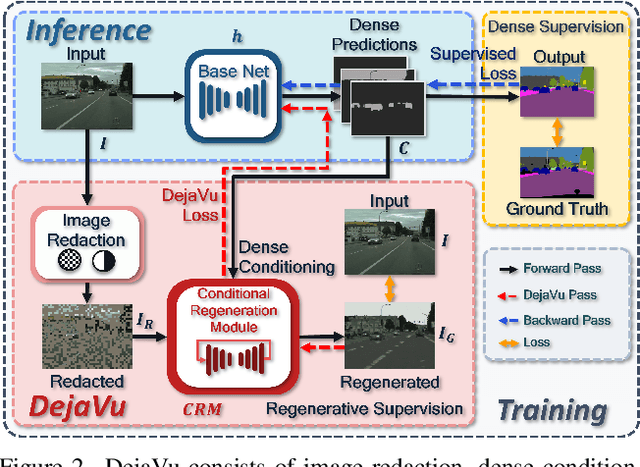

We present DejaVu, a novel framework which leverages conditional image regeneration as additional supervision during training to improve deep networks for dense prediction tasks such as segmentation, depth estimation, and surface normal prediction. First, we apply redaction to the input image, which removes certain structural information by sparse sampling or selective frequency removal. Next, we use a conditional regenerator, which takes the redacted image and the dense predictions as inputs, and reconstructs the original image by filling in the missing structural information. In the redacted image, structural attributes like boundaries are broken while semantic context is largely preserved. In order to make the regeneration feasible, the conditional generator will then require the structure information from the other input source, i.e., the dense predictions. As such, by including this conditional regeneration objective during training, DejaVu encourages the base network to learn to embed accurate scene structure in its dense prediction. This leads to more accurate predictions with clearer boundaries and better spatial consistency. When it is feasible to leverage additional computation, DejaVu can be extended to incorporate an attention-based regeneration module within the dense prediction network, which further improves accuracy. Through extensive experiments on multiple dense prediction benchmarks such as Cityscapes, COCO, ADE20K, NYUD-v2, and KITTI, we demonstrate the efficacy of employing DejaVu during training, as it outperforms SOTA methods at no added computation cost.
TransAdapt: A Transformative Framework for Online Test Time Adaptive Semantic Segmentation
Feb 24, 2023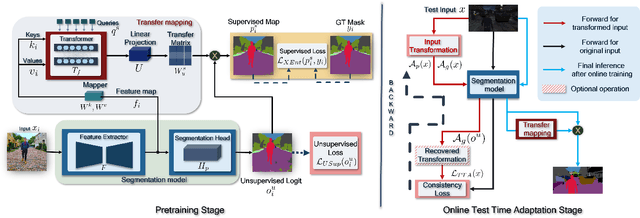


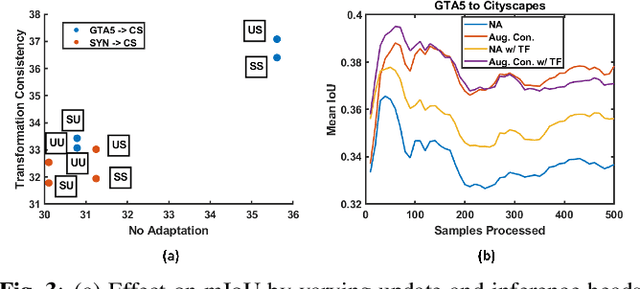
Test-time adaptive (TTA) semantic segmentation adapts a source pre-trained image semantic segmentation model to unlabeled batches of target domain test images, different from real-world, where samples arrive one-by-one in an online fashion. To tackle online settings, we propose TransAdapt, a framework that uses transformer and input transformations to improve segmentation performance. Specifically, we pre-train a transformer-based module on a segmentation network that transforms unsupervised segmentation output to a more reliable supervised output, without requiring test-time online training. To also facilitate test-time adaptation, we propose an unsupervised loss based on the transformed input that enforces the model to be invariant and equivariant to photometric and geometric perturbations, respectively. Overall, our framework produces higher quality segmentation masks with up to 17.6% and 2.8% mIOU improvement over no-adaptation and competitive baselines, respectively.
Oracle Analysis of Representations for Deep Open Set Detection
Sep 22, 2022
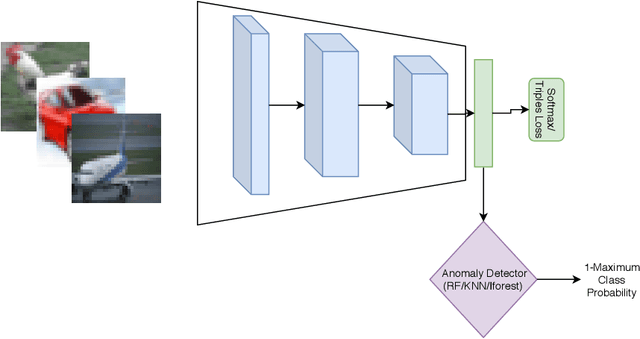

The problem of detecting a novel class at run time is known as Open Set Detection & is important for various real-world applications like medical application, autonomous driving, etc. Open Set Detection within context of deep learning involves solving two problems: (i) Must map the input images into a latent representation that contains enough information to detect the outliers, and (ii) Must learn an anomaly scoring function that can extract this information from the latent representation to identify the anomalies. Research in deep anomaly detection methods has progressed slowly. One reason may be that most papers simultaneously introduce new representation learning techniques and new anomaly scoring approaches. The goal of this work is to improve this methodology by providing ways of separately measuring the effectiveness of the representation learning and anomaly scoring. This work makes two methodological contributions. The first is to introduce the notion of Oracle anomaly detection for quantifying the information available in a learned latent representation. The second is to introduce Oracle representation learning, which produces a representation that is guaranteed to be sufficient for accurate anomaly detection. These two techniques help researchers to separate the quality of the learned representation from the performance of the anomaly scoring mechanism so that they can debug and improve their systems. The methods also provide an upper limit on how much open category detection can be improved through better anomaly scoring mechanisms. The combination of the two oracles gives an upper limit on the performance that any open category detection method could achieve. This work introduces these two oracle techniques and demonstrates their utility by applying them to several leading open category detection methods.