 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShengkang Chen
Heterogeneous robot teams with unified perception and autonomy: How Team CSIRO Data61 tied for the top score at the DARPA Subterranean Challenge
Feb 26, 2023

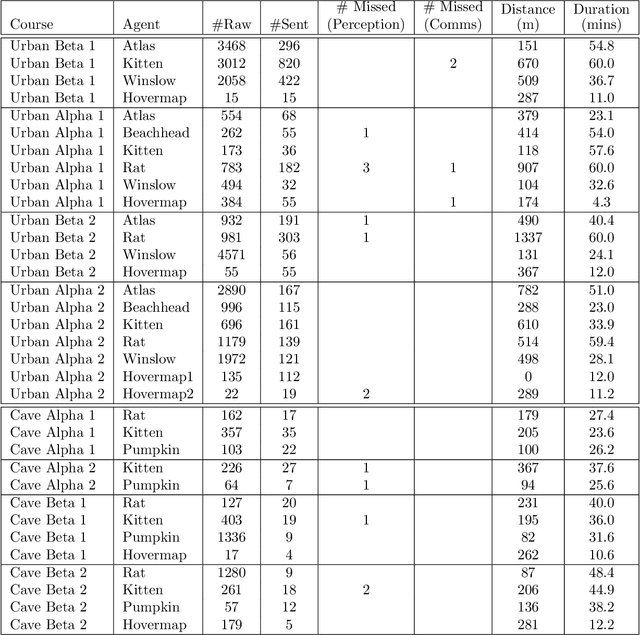
The DARPA Subterranean Challenge was designed for competitors to develop and deploy teams of autonomous robots to explore difficult unknown underground environments. Categorised in to human-made tunnels, underground urban infrastructure and natural caves, each of these subdomains had many challenging elements for robot perception, locomotion, navigation and autonomy. These included degraded wireless communication, poor visibility due to smoke, narrow passages and doorways, clutter, uneven ground, slippery and loose terrain, stairs, ledges, overhangs, dripping water, and dynamic obstacles that move to block paths among others. In the Final Event of this challenge held in September 2021, the course consisted of all three subdomains. The task was for the robot team to perform a scavenger hunt for a number of pre-defined artefacts within a limited time frame. Only one human supervisor was allowed to communicate with the robots once they were in the course. Points were scored when accurate detections and their locations were communicated back to the scoring server. A total of 8 teams competed in the finals held at the Mega Cavern in Louisville, KY, USA. This article describes the systems deployed by Team CSIRO Data61 that tied for the top score and won second place at the event.
Toward Ethical Robotic Behavior in Human-Robot Interaction Scenarios
Jun 21, 2022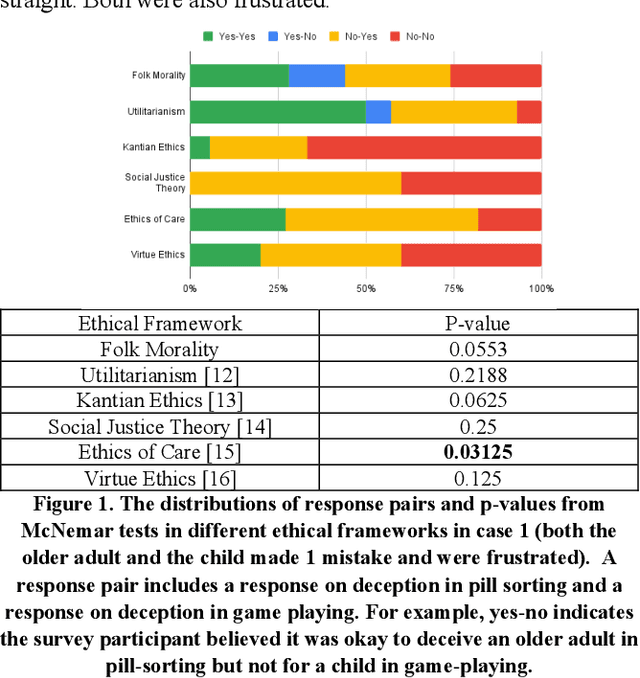
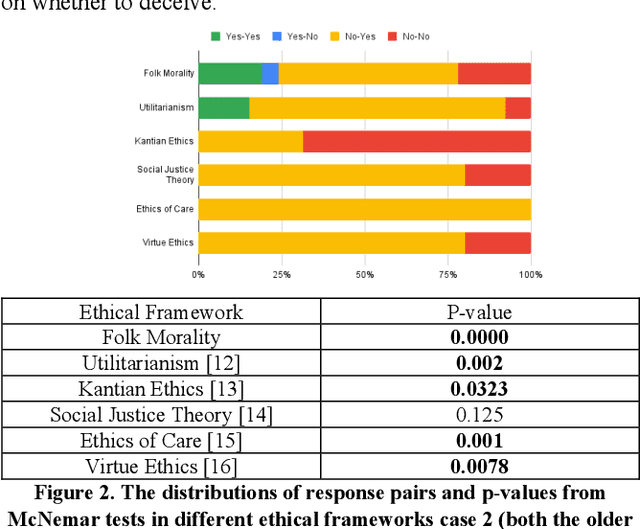
This paper describes current progress on developing an ethical architecture for robots that are designed to follow human ethical decision-making processes. We surveyed both regular adults (folks) and ethics experts (experts) on what they consider to be ethical behavior in two specific scenarios: pill-sorting with an older adult and game playing with a child. A key goal of the surveys is to better understand human ethical decision-making. In the first survey, folk responses were based on the subject's ethical choices ("folk morality"); in the second survey, expert responses were based on the expert's application of different formal ethical frameworks to each scenario. We observed that most of the formal ethical frameworks we included in the survey (Utilitarianism, Kantian Ethics, Ethics of Care and Virtue Ethics) and "folk morality" were conservative toward deception in the high-risk task with an older adult when both the adult and the child had significant performance deficiencies.
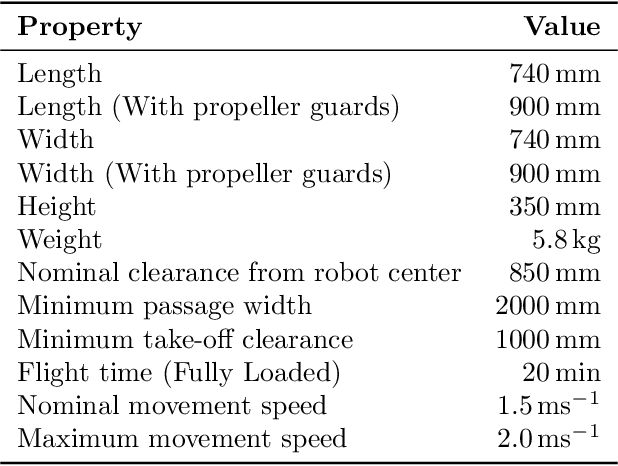
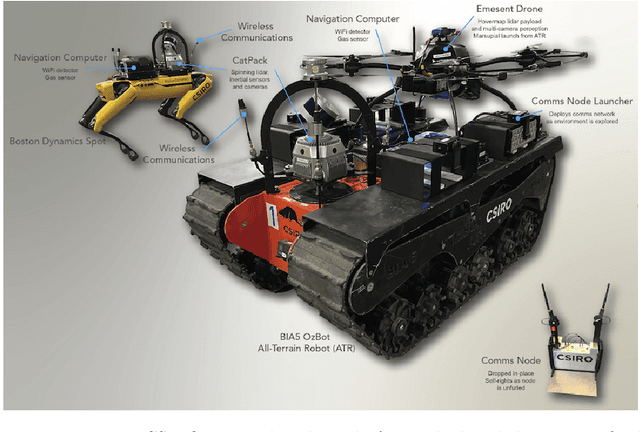
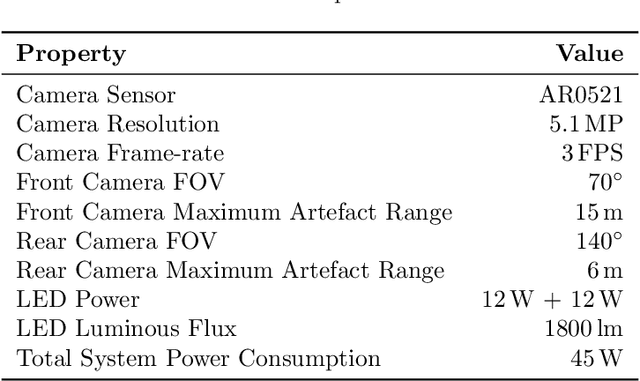
Heterogeneous Ground and Air Platforms, Homogeneous Sensing: Team CSIRO Data61's Approach to the DARPA Subterranean Challenge
Apr 19, 2021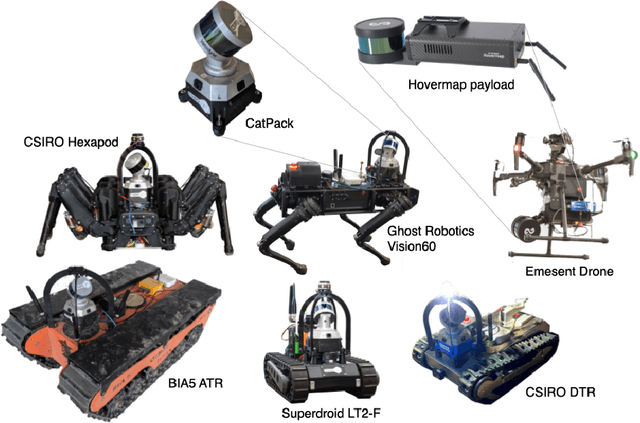
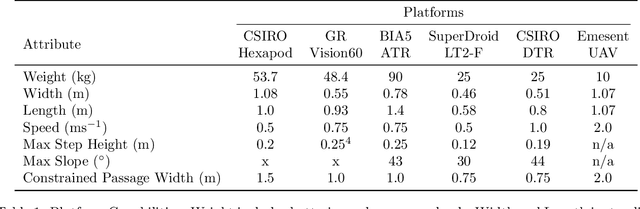
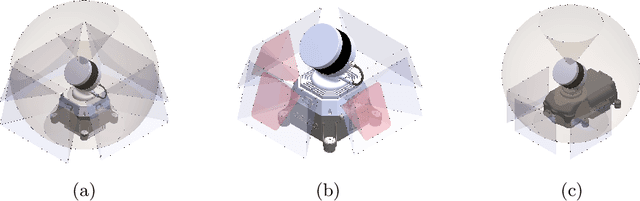
Heterogeneous teams of robots, leveraging a balance between autonomy and human interaction, bring powerful capabilities to the problem of exploring dangerous, unstructured subterranean environments. Here we describe the solution developed by Team CSIRO Data61, consisting of CSIRO, Emesent and Georgia Tech, during the DARPA Subterranean Challenge. These presented systems were fielded in the Tunnel Circuit in August 2019, the Urban Circuit in February 2020, and in our own Cave event, conducted in September 2020. A unique capability of the fielded team is the homogeneous sensing of the platforms utilised, which is leveraged to obtain a decentralised multi-agent SLAM solution on each platform (both ground agents and UAVs) using peer-to-peer communications. This enabled a shift in focus from constructing a pervasive communications network to relying on multi-agent autonomy, motivated by experiences in early circuit events. These experiences also showed the surprising capability of rugged tracked platforms for challenging terrain, which in turn led to the heterogeneous team structure based on a BIA5 OzBot Titan ground robot and an Emesent Hovermap UAV, supplemented by smaller tracked or legged ground robots. The ground agents use a common CatPack perception module, which allowed reuse of the perception and autonomy stack across all ground agents with minimal adaptation.
Localization Algorithm with Circular Representation in 2D and its Similarity to Mammalian Brains
Jan 25, 2019
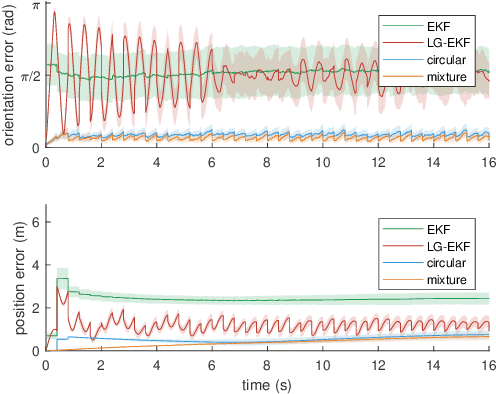
Extended Kalman filter (EKF) does not guarantee consistent mean and covariance under linearization, even though it is the main framework for robotic localization. While Lie group improves the modeling of the state space in localization, the EKF on Lie group still relies on the arbitrary Gaussian assumption in face of nonlinear models. We instead use von Mises filter for orientation estimation together with the conventional Kalman filter for position estimation, and thus we are able to characterize the first two moments of the state estimates. Since the proposed algorithm holds a solid probabilistic basis, it is fundamentally relieved from the inconsistency problem. Furthermore, we extend the localization algorithm to fully circular representation even for position, which is similar to grid patterns found in mammalian brains and in recurrent neural networks. The applicability of the proposed algorithms is substantiated not only by strong mathematical foundation but also by the comparison against other common localization methods.