 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShengqiang Zhang
LoHoRavens: A Long-Horizon Language-Conditioned Benchmark for Robotic Tabletop Manipulation
Oct 23, 2023
The convergence of embodied agents and large language models (LLMs) has brought significant advancements to embodied instruction following. Particularly, the strong reasoning capabilities of LLMs make it possible for robots to perform long-horizon tasks without expensive annotated demonstrations. However, public benchmarks for testing the long-horizon reasoning capabilities of language-conditioned robots in various scenarios are still missing. To fill this gap, this work focuses on the tabletop manipulation task and releases a simulation benchmark, \textit{LoHoRavens}, which covers various long-horizon reasoning aspects spanning color, size, space, arithmetics and reference. Furthermore, there is a key modality bridging problem for long-horizon manipulation tasks with LLMs: how to incorporate the observation feedback during robot execution for the LLM's closed-loop planning, which is however less studied by prior work. We investigate two methods of bridging the modality gap: caption generation and learnable interface for incorporating explicit and implicit observation feedback to the LLM, respectively. These methods serve as the two baselines for our proposed benchmark. Experiments show that both methods struggle to solve some tasks, indicating long-horizon manipulation tasks are still challenging for current popular models. We expect the proposed public benchmark and baselines can help the community develop better models for long-horizon tabletop manipulation tasks.
Towards Language-Based Modulation of Assistive Robots through Multimodal Models
Jun 27, 2023
In the field of Geriatronics, enabling effective and transparent communication between humans and robots is crucial for enhancing the acceptance and performance of assistive robots. Our early-stage research project investigates the potential of language-based modulation as a means to improve human-robot interaction. We propose to explore real-time modulation during task execution, leveraging language cues, visual references, and multimodal inputs. By developing transparent and interpretable methods, we aim to enable robots to adapt and respond to language commands, enhancing their usability and flexibility. Through the exchange of insights and knowledge at the workshop, we seek to gather valuable feedback to advance our research and contribute to the development of interactive robotic systems for Geriatronics and beyond.
Attention Temperature Matters in Abstractive Summarization Distillation
Jun 08, 2021



Recent progress of abstractive text summarization largely relies on large pre-trained sequence-to-sequence Transformer models, which are computationally expensive. This paper aims to distill these large models into smaller ones for faster inference and minimal performance loss. Pseudo-labeling based methods are popular in sequence-to-sequence model distillation. In this paper, we find simply manipulating attention temperatures in Transformers can make pseudo labels easier to learn for student models. Our experiments on three summarization datasets show our proposed method consistently improves over vanilla pseudo-labeling based methods. We also find that both the pseudo labels and summaries produced by our students are shorter and more abstractive. We will make our code and models publicly available.
Pre-trained Language Model based Ranking in Baidu Search
Jun 03, 2021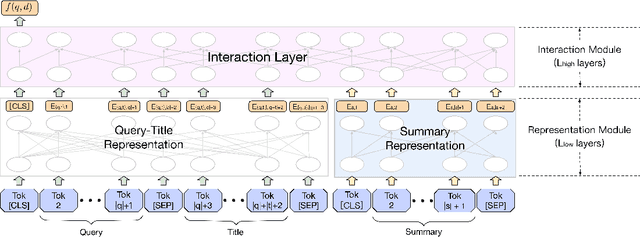
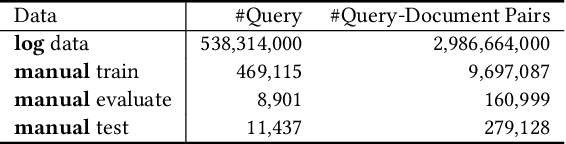

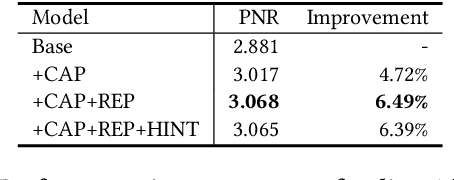
As the heart of a search engine, the ranking system plays a crucial role in satisfying users' information demands. More recently, neural rankers fine-tuned from pre-trained language models (PLMs) establish state-of-the-art ranking effectiveness. However, it is nontrivial to directly apply these PLM-based rankers to the large-scale web search system due to the following challenging issues:(1) the prohibitively expensive computations of massive neural PLMs, especially for long texts in the web-document, prohibit their deployments in an online ranking system that demands extremely low latency;(2) the discrepancy between existing ranking-agnostic pre-training objectives and the ad-hoc retrieval scenarios that demand comprehensive relevance modeling is another main barrier for improving the online ranking system;(3) a real-world search engine typically involves a committee of ranking components, and thus the compatibility of the individually fine-tuned ranking model is critical for a cooperative ranking system. In this work, we contribute a series of successfully applied techniques in tackling these exposed issues when deploying the state-of-the-art Chinese pre-trained language model, i.e., ERNIE, in the online search engine system. We first articulate a novel practice to cost-efficiently summarize the web document and contextualize the resultant summary content with the query using a cheap yet powerful Pyramid-ERNIE architecture. Then we endow an innovative paradigm to finely exploit the large-scale noisy and biased post-click behavioral data for relevance-oriented pre-training. We also propose a human-anchored fine-tuning strategy tailored for the online ranking system, aiming to stabilize the ranking signals across various online components. Extensive offline and online experimental results show that the proposed techniques significantly boost the search engine's performance.