 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWenhui Diao
Not Just Learning from Others but Relying on Yourself: A New Perspective on Few-Shot Segmentation in Remote Sensing
Oct 19, 2023

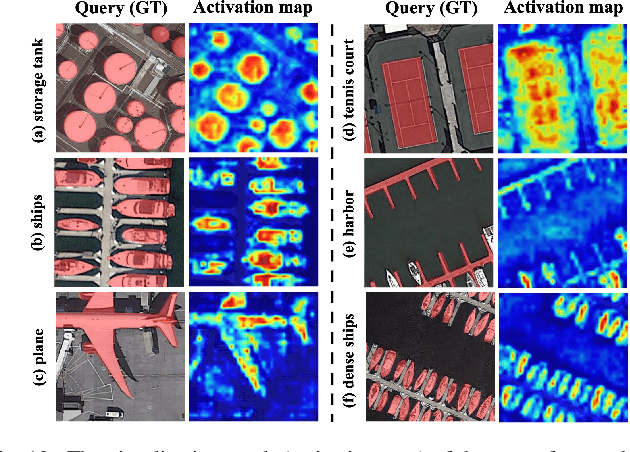
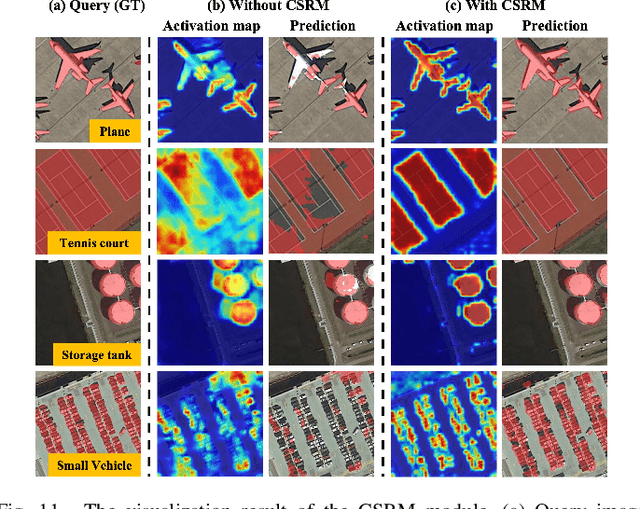
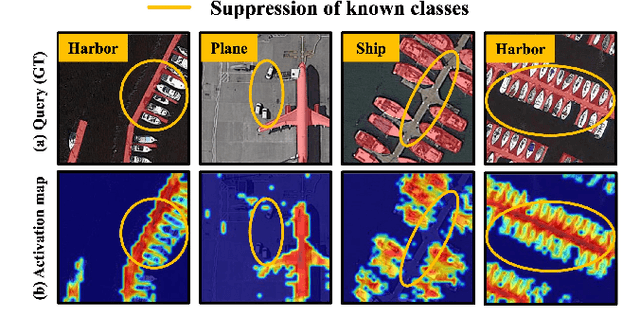
Few-shot segmentation (FSS) is proposed to segment unknown class targets with just a few annotated samples. Most current FSS methods follow the paradigm of mining the semantics from the support images to guide the query image segmentation. However, such a pattern of `learning from others' struggles to handle the extreme intra-class variation, preventing FSS from being directly generalized to remote sensing scenes. To bridge the gap of intra-class variance, we develop a Dual-Mining network named DMNet for cross-image mining and self-mining, meaning that it no longer focuses solely on support images but pays more attention to the query image itself. Specifically, we propose a Class-public Region Mining (CPRM) module to effectively suppress irrelevant feature pollution by capturing the common semantics between the support-query image pair. The Class-specific Region Mining (CSRM) module is then proposed to continuously mine the class-specific semantics of the query image itself in a `filtering' and `purifying' manner. In addition, to prevent the co-existence of multiple classes in remote sensing scenes from exacerbating the collapse of FSS generalization, we also propose a new Known-class Meta Suppressor (KMS) module to suppress the activation of known-class objects in the sample. Extensive experiments on the iSAID and LoveDA remote sensing datasets have demonstrated that our method sets the state-of-the-art with a minimum number of model parameters. Significantly, our model with the backbone of Resnet-50 achieves the mIoU of 49.58% and 51.34% on iSAID under 1-shot and 5-shot settings, outperforming the state-of-the-art method by 1.8% and 1.12%, respectively. The code is publicly available at https://github.com/HanboBizl/DMNet.
OGMN: Occlusion-guided Multi-task Network for Object Detection in UAV Images
Apr 24, 2023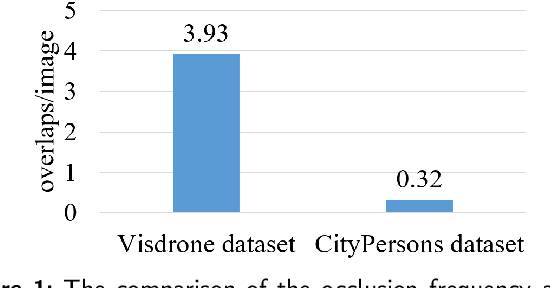
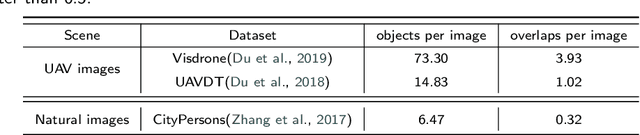
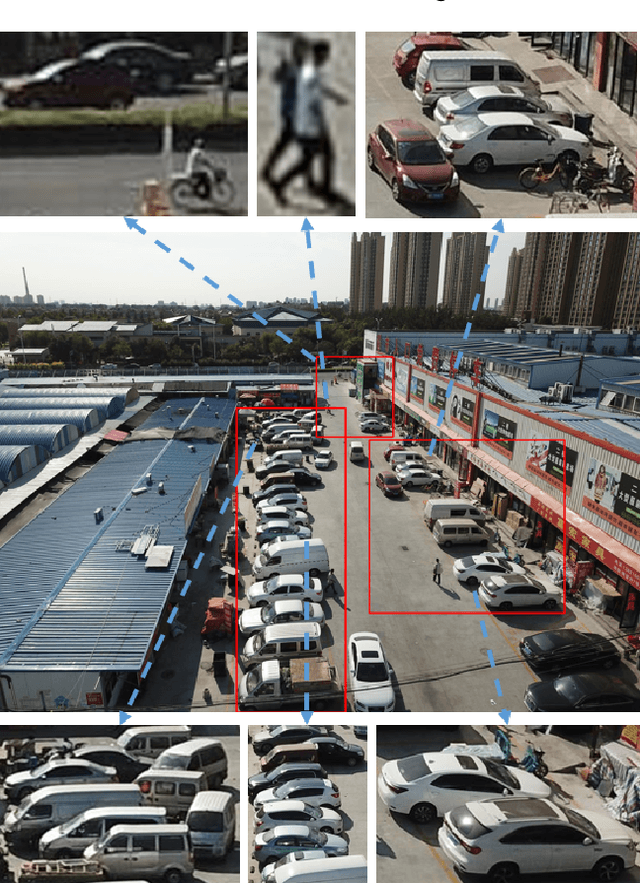
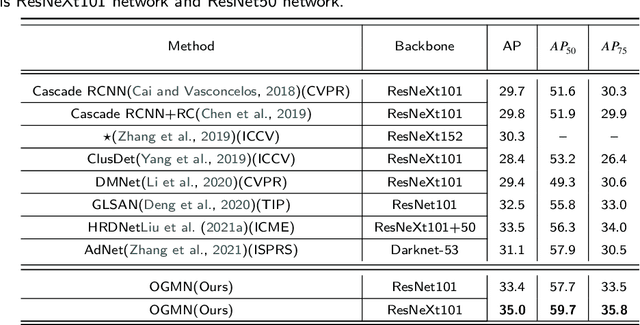
Occlusion between objects is one of the overlooked challenges for object detection in UAV images. Due to the variable altitude and angle of UAVs, occlusion in UAV images happens more frequently than that in natural scenes. Compared to occlusion in natural scene images, occlusion in UAV images happens with feature confusion problem and local aggregation characteristic. And we found that extracting or localizing occlusion between objects is beneficial for the detector to address this challenge. According to this finding, the occlusion localization task is introduced, which together with the object detection task constitutes our occlusion-guided multi-task network (OGMN). The OGMN contains the localization of occlusion and two occlusion-guided multi-task interactions. In detail, an occlusion estimation module (OEM) is proposed to precisely localize occlusion. Then the OGMN utilizes the occlusion localization results to implement occlusion-guided detection with two multi-task interactions. One interaction for the guide is between two task decoders to address the feature confusion problem, and an occlusion decoupling head (ODH) is proposed to replace the general detection head. Another interaction for guide is designed in the detection process according to local aggregation characteristic, and a two-phase progressive refinement process (TPP) is proposed to optimize the detection process. Extensive experiments demonstrate the effectiveness of our OGMN on the Visdrone and UAVDT datasets. In particular, our OGMN achieves 35.0% mAP on the Visdrone dataset and outperforms the baseline by 5.3%. And our OGMN provides a new insight for accurate occlusion localization and achieves competitive detection performance.
SiamTHN: Siamese Target Highlight Network for Visual Tracking
Mar 22, 2023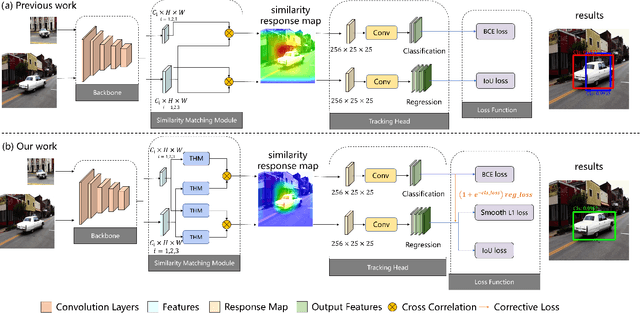
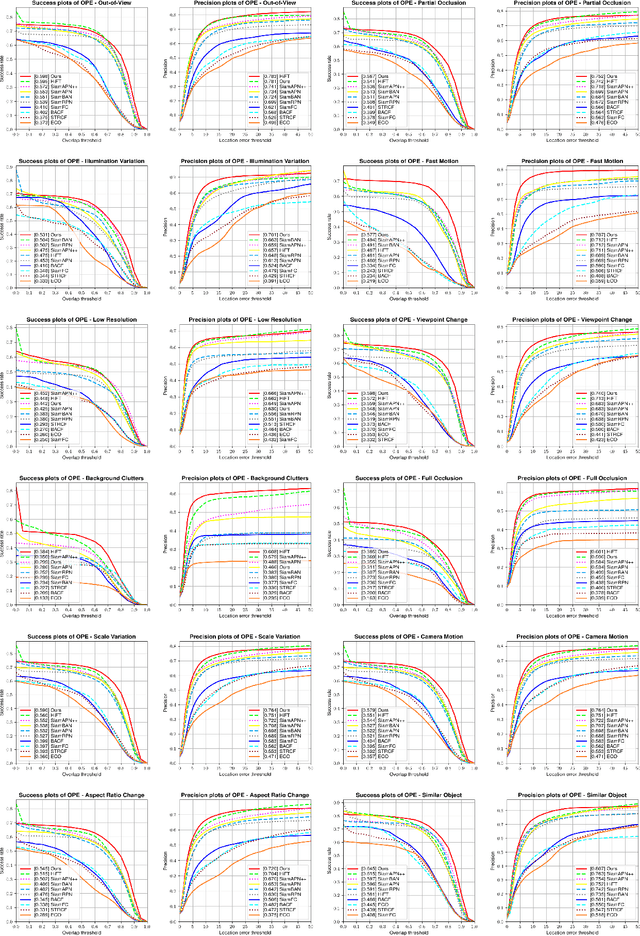
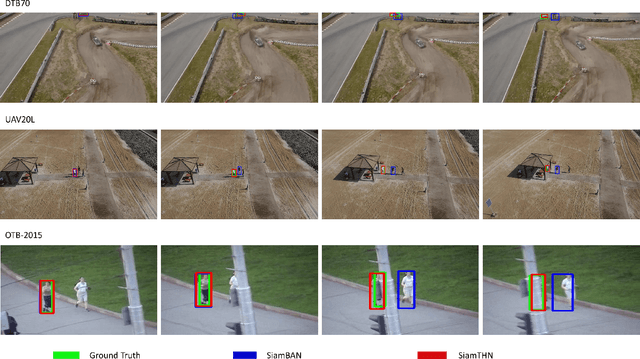
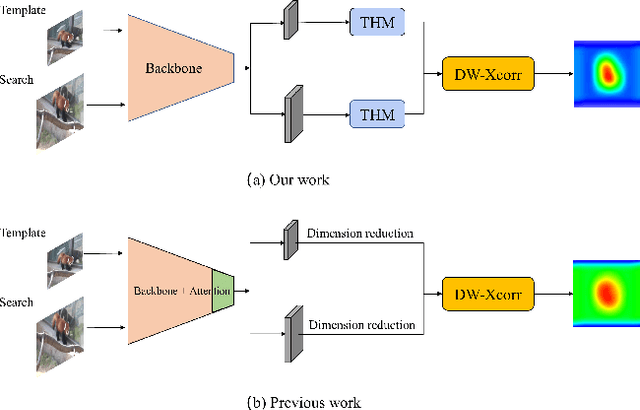
Siamese network based trackers develop rapidly in the field of visual object tracking in recent years. The majority of siamese network based trackers now in use treat each channel in the feature maps generated by the backbone network equally, making the similarity response map sensitive to background influence and hence challenging to focus on the target region. Additionally, there are no structural links between the classification and regression branches in these trackers, and the two branches are optimized separately during training. Therefore, there is a misalignment between the classification and regression branches, which results in less accurate tracking results. In this paper, a Target Highlight Module is proposed to help the generated similarity response maps to be more focused on the target region. To reduce the misalignment and produce more precise tracking results, we propose a corrective loss to train the model. The two branches of the model are jointly tuned with the use of corrective loss to produce more reliable prediction results. Experiments on 5 challenging benchmark datasets reveal that the method outperforms current models in terms of performance, and runs at 38 fps, proving its effectiveness and efficiency.
Elevation Estimation-Driven Building 3D Reconstruction from Single-View Remote Sensing Imagery
Jan 11, 2023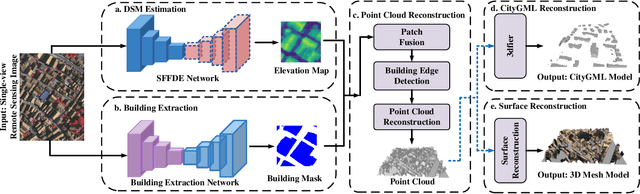
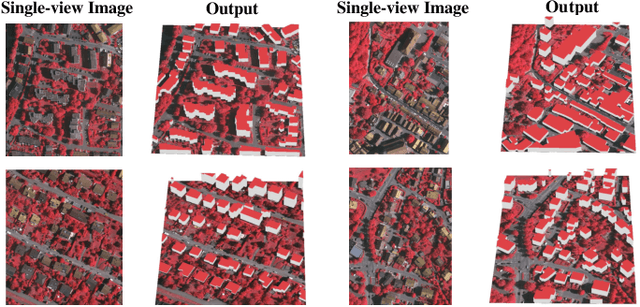
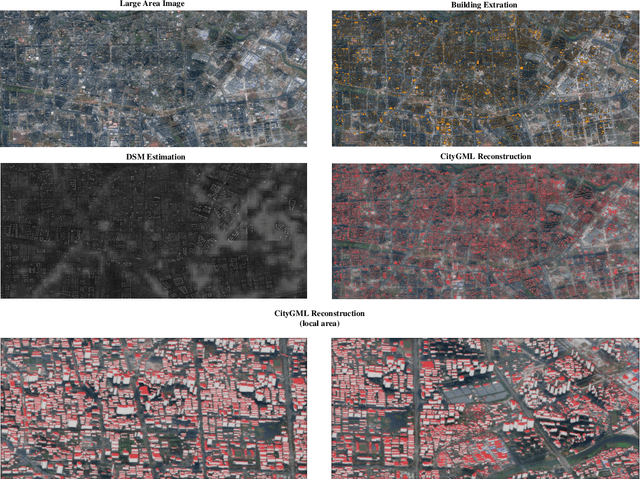
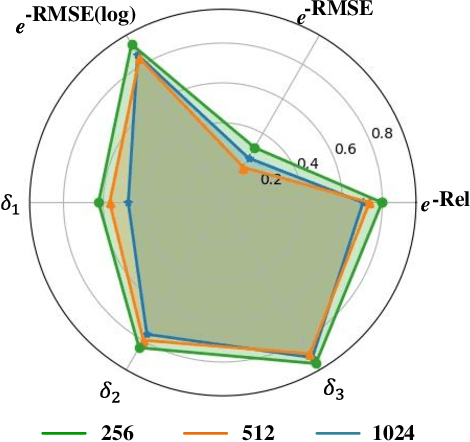
Building 3D reconstruction from remote sensing images has a wide range of applications in smart cities, photogrammetry and other fields. Methods for automatic 3D urban building modeling typically employ multi-view images as input to algorithms to recover point clouds and 3D models of buildings. However, such models rely heavily on multi-view images of buildings, which are time-intensive and limit the applicability and practicality of the models. To solve these issues, we focus on designing an efficient DSM estimation-driven reconstruction framework (Building3D), which aims to reconstruct 3D building models from the input single-view remote sensing image. First, we propose a Semantic Flow Field-guided DSM Estimation (SFFDE) network, which utilizes the proposed concept of elevation semantic flow to achieve the registration of local and global features. Specifically, in order to make the network semantics globally aware, we propose an Elevation Semantic Globalization (ESG) module to realize the semantic globalization of instances. Further, in order to alleviate the semantic span of global features and original local features, we propose a Local-to-Global Elevation Semantic Registration (L2G-ESR) module based on elevation semantic flow. Our Building3D is rooted in the SFFDE network for building elevation prediction, synchronized with a building extraction network for building masks, and then sequentially performs point cloud reconstruction, surface reconstruction (or CityGML model reconstruction). On this basis, our Building3D can optionally generate CityGML models or surface mesh models of the buildings. Extensive experiments on ISPRS Vaihingen and DFC2019 datasets on the DSM estimation task show that our SFFDE significantly improves upon state-of-the-arts. Furthermore, our Building3D achieves impressive results in the 3D point cloud and 3D model reconstruction process.
Breaking Immutable: Information-Coupled Prototype Elaboration for Few-Shot Object Detection
Nov 27, 2022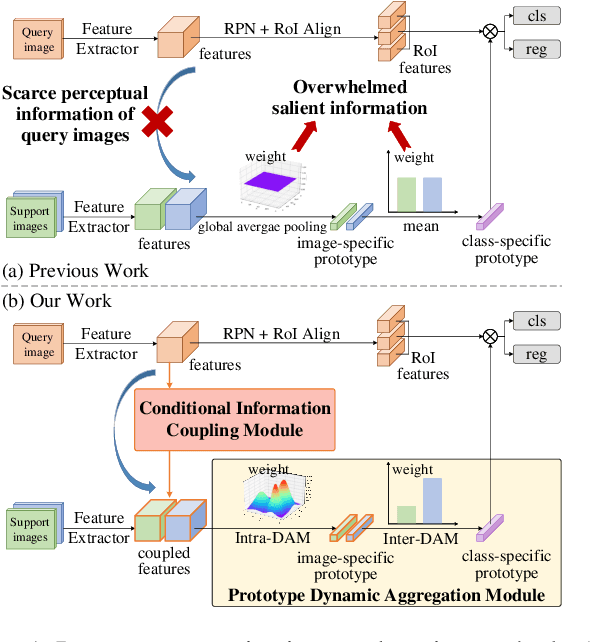
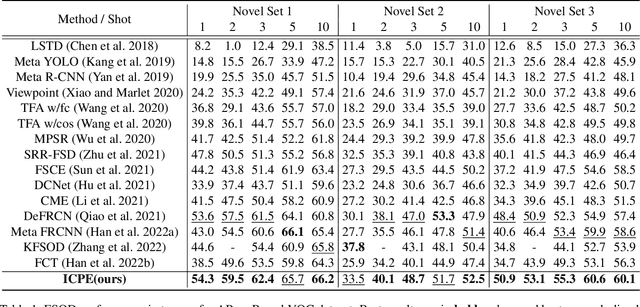
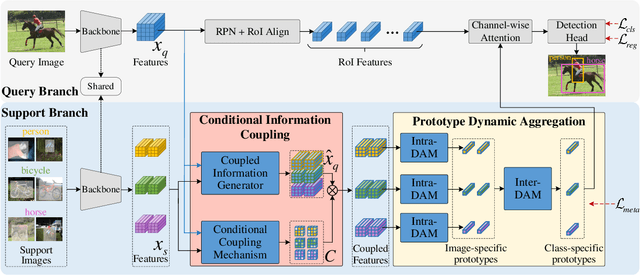
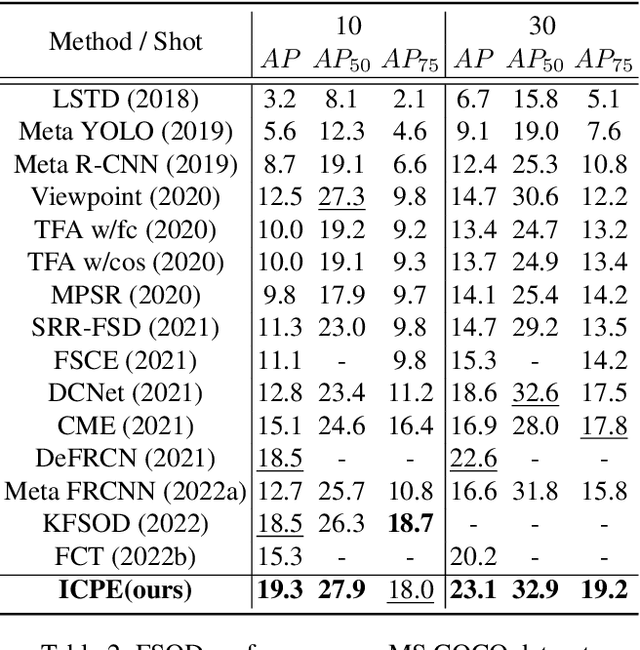
Few-shot object detection, expecting detectors to detect novel classes with a few instances, has made conspicuous progress. However, the prototypes extracted by existing meta-learning based methods still suffer from insufficient representative information and lack awareness of query images, which cannot be adaptively tailored to different query images. Firstly, only the support images are involved for extracting prototypes, resulting in scarce perceptual information of query images. Secondly, all pixels of all support images are treated equally when aggregating features into prototype vectors, thus the salient objects are overwhelmed by the cluttered background. In this paper, we propose an Information-Coupled Prototype Elaboration (ICPE) method to generate specific and representative prototypes for each query image. Concretely, a conditional information coupling module is introduced to couple information from the query branch to the support branch, strengthening the query-perceptual information in support features. Besides, we design a prototype dynamic aggregation module that dynamically adjusts intra-image and inter-image aggregation weights to highlight the salient information useful for detecting query images. Experimental results on both Pascal VOC and MS COCO demonstrate that our method achieves state-of-the-art performance in almost all settings.
Beyond single receptive field: A receptive field fusion-and-stratification network for airborne laser scanning point cloud classification
Jul 21, 2022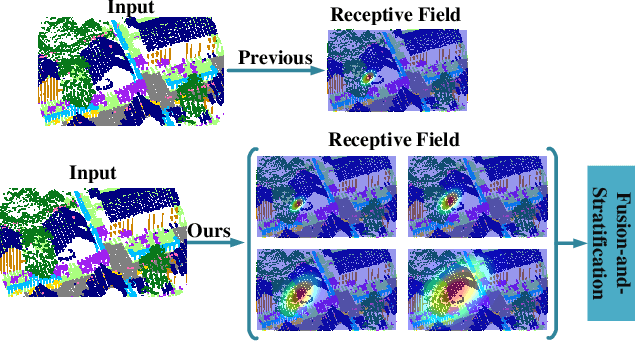
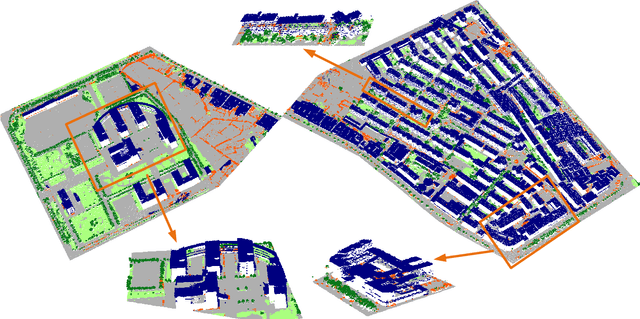
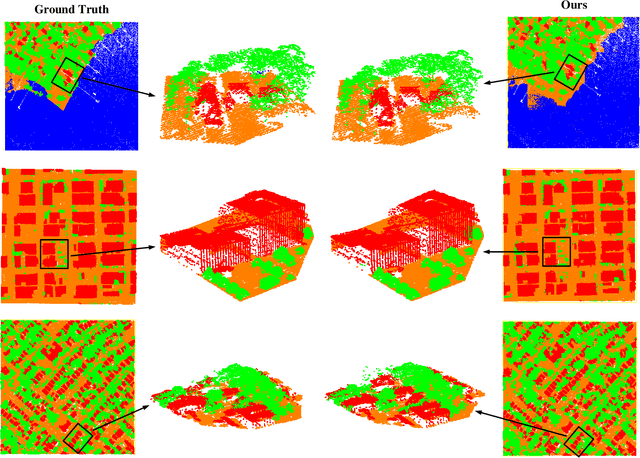
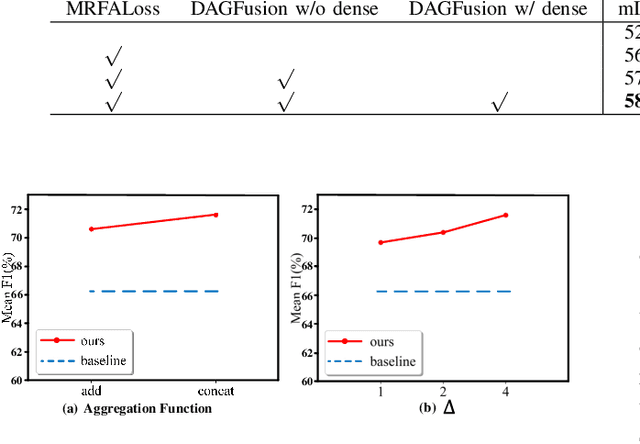
The classification of airborne laser scanning (ALS) point clouds is a critical task of remote sensing and photogrammetry fields. Although recent deep learning-based methods have achieved satisfactory performance, they have ignored the unicity of the receptive field, which makes the ALS point cloud classification remain challenging for the distinguishment of the areas with complex structures and extreme scale variations. In this article, for the objective of configuring multi-receptive field features, we propose a novel receptive field fusion-and-stratification network (RFFS-Net). With a novel dilated graph convolution (DGConv) and its extension annular dilated convolution (ADConv) as basic building blocks, the receptive field fusion process is implemented with the dilated and annular graph fusion (DAGFusion) module, which obtains multi-receptive field feature representation through capturing dilated and annular graphs with various receptive regions. The stratification of the receptive fields with point sets of different resolutions as the calculation bases is performed with Multi-level Decoders nested in RFFS-Net and driven by the multi-level receptive field aggregation loss (MRFALoss) to drive the network to learn in the direction of the supervision labels with different resolutions. With receptive field fusion-and-stratification, RFFS-Net is more adaptable to the classification of regions with complex structures and extreme scale variations in large-scale ALS point clouds. Evaluated on the ISPRS Vaihingen 3D dataset, our RFFS-Net significantly outperforms the baseline approach by 5.3% on mF1 and 5.4% on mIoU, accomplishing an overall accuracy of 82.1%, an mF1 of 71.6%, and an mIoU of 58.2%. Furthermore, experiments on the LASDU dataset and the 2019 IEEE-GRSS Data Fusion Contest dataset show that RFFS-Net achieves a new state-of-the-art classification performance.
Semantic Segmentation for Point Cloud Scenes via Dilated Graph Feature Aggregation and Pyramid Decoders
Apr 11, 2022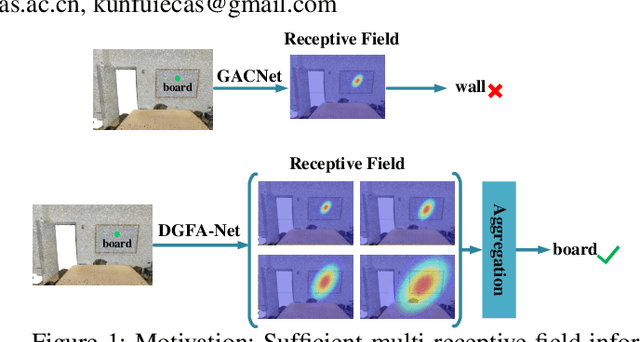

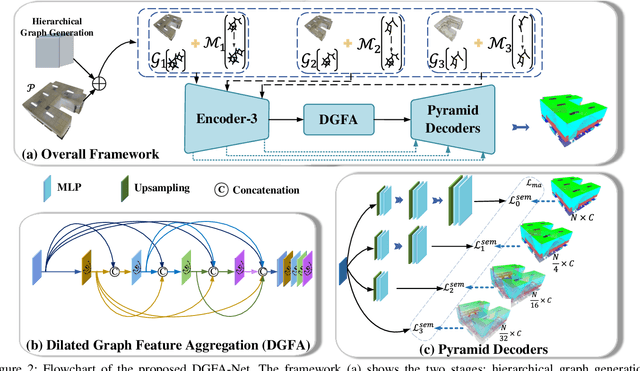
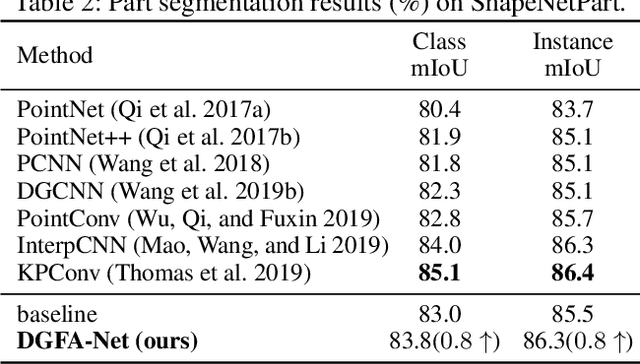
Semantic segmentation of point clouds generates comprehensive understanding of scenes through densely predicting the category for each point. Due to the unicity of receptive field, semantic segmentation of point clouds remains challenging for the expression of multi-receptive field features, which brings about the misclassification of instances with similar spatial structures. In this paper, we propose a graph convolutional network DGFA-Net rooted in dilated graph feature aggregation (DGFA), guided by multi-basis aggregation loss (MALoss) calculated through Pyramid Decoders. To configure multi-receptive field features, DGFA which takes the proposed dilated graph convolution (DGConv) as its basic building block, is designed to aggregate multi-scale feature representation by capturing dilated graphs with various receptive regions. By simultaneously considering penalizing the receptive field information with point sets of different resolutions as calculation bases, we introduce Pyramid Decoders driven by MALoss for the diversity of receptive field bases. Combining these two aspects, DGFA-Net significantly improves the segmentation performance of instances with similar spatial structures. Experiments on S3DIS, ShapeNetPart and Toronto-3D show that DGFA-Net outperforms the baseline approach, achieving a new state-of-the-art segmentation performance.
Double Similarity Distillation for Semantic Image Segmentation
Jul 19, 2021



The balance between high accuracy and high speed has always been a challenging task in semantic image segmentation. Compact segmentation networks are more widely used in the case of limited resources, while their performances are constrained. In this paper, motivated by the residual learning and global aggregation, we propose a simple yet general and effective knowledge distillation framework called double similarity distillation (DSD) to improve the classification accuracy of all existing compact networks by capturing the similarity knowledge in pixel and category dimensions, respectively. Specifically, we propose a pixel-wise similarity distillation (PSD) module that utilizes residual attention maps to capture more detailed spatial dependencies across multiple layers. Compared with exiting methods, the PSD module greatly reduces the amount of calculation and is easy to expand. Furthermore, considering the differences in characteristics between semantic segmentation task and other computer vision tasks, we propose a category-wise similarity distillation (CSD) module, which can help the compact segmentation network strengthen the global category correlation by constructing the correlation matrix. Combining these two modules, DSD framework has no extra parameters and only a minimal increase in FLOPs. Extensive experiments on four challenging datasets, including Cityscapes, CamVid, ADE20K, and Pascal VOC 2012, show that DSD outperforms current state-of-the-art methods, proving its effectiveness and generality. The code and models will be publicly available.
FAIR1M: A Benchmark Dataset for Fine-grained Object Recognition in High-Resolution Remote Sensing Imagery
Mar 24, 2021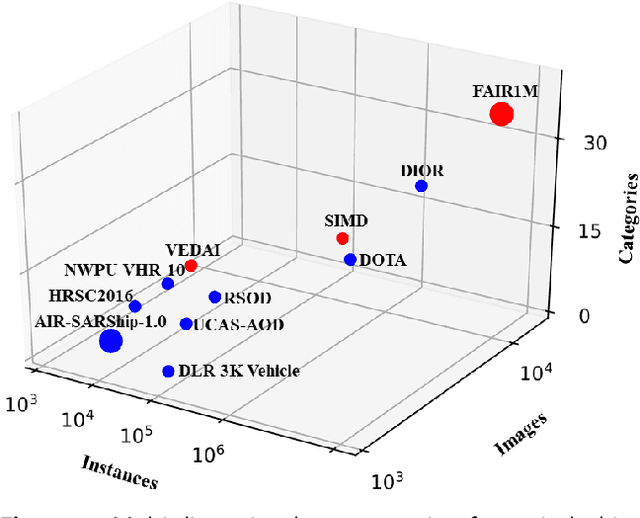
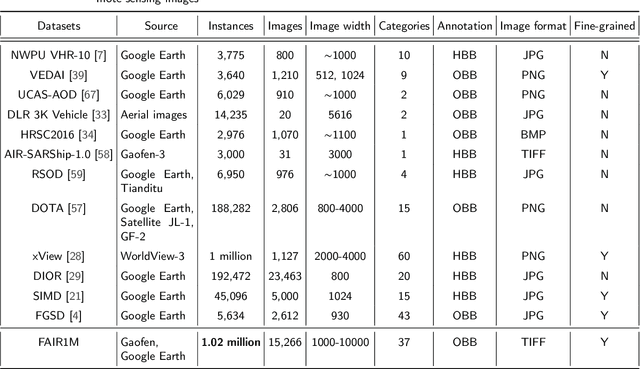
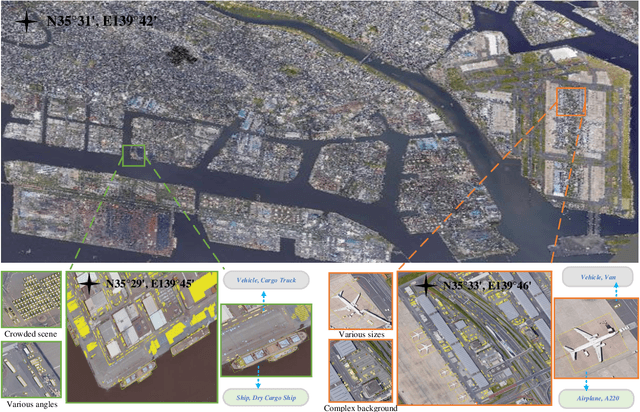
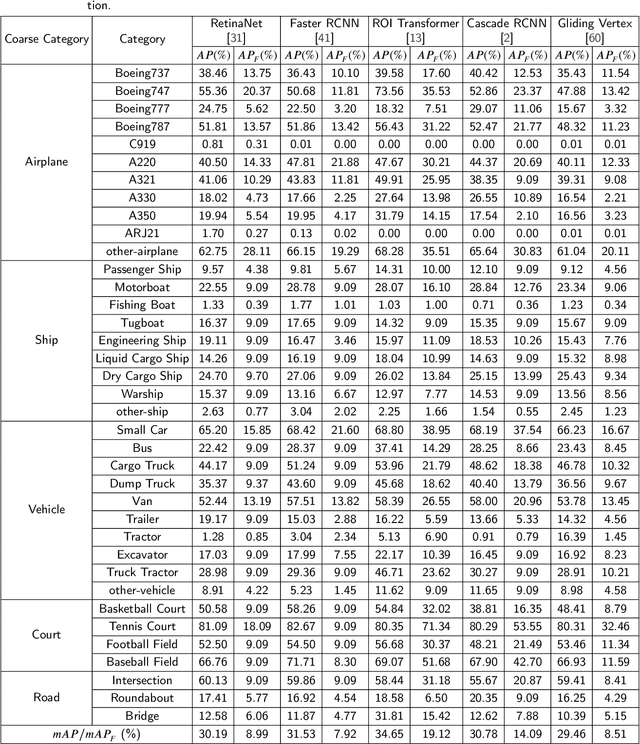
With the rapid development of deep learning, many deep learning-based approaches have made great achievements in object detection task. It is generally known that deep learning is a data-driven method. Data directly impact the performance of object detectors to some extent. Although existing datasets have included common objects in remote sensing images, they still have some limitations in terms of scale, categories, and images. Therefore, there is a strong requirement for establishing a large-scale benchmark on object detection in high-resolution remote sensing images. In this paper, we propose a novel benchmark dataset with more than 1 million instances and more than 15,000 images for Fine-grAined object recognItion in high-Resolution remote sensing imagery which is named as FAIR1M. All objects in the FAIR1M dataset are annotated with respect to 5 categories and 37 sub-categories by oriented bounding boxes. Compared with existing detection datasets dedicated to object detection, the FAIR1M dataset has 4 particular characteristics: (1) it is much larger than other existing object detection datasets both in terms of the quantity of instances and the quantity of images, (2) it provides more rich fine-grained category information for objects in remote sensing images, (3) it contains geographic information such as latitude, longitude and resolution, (4) it provides better image quality owing to a careful data cleaning procedure. To establish a baseline for fine-grained object recognition, we propose a novel evaluation method and benchmark fine-grained object detection tasks and a visual classification task using several State-Of-The-Art (SOTA) deep learning-based models on our FAIR1M dataset. Experimental results strongly indicate that the FAIR1M dataset is closer to practical application and it is considerably more challenging than existing datasets.
Ship Instance Segmentation From Remote Sensing Images Using Sequence Local Context Module
Apr 22, 2019
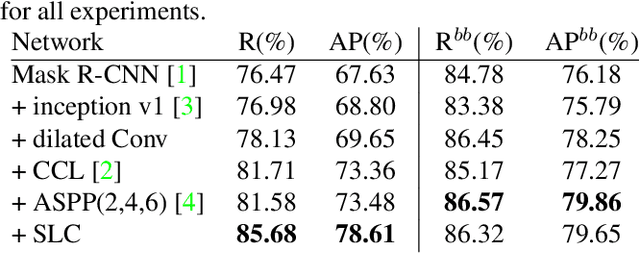
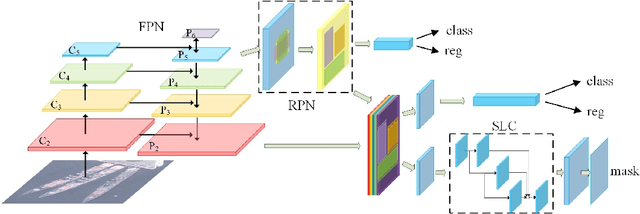
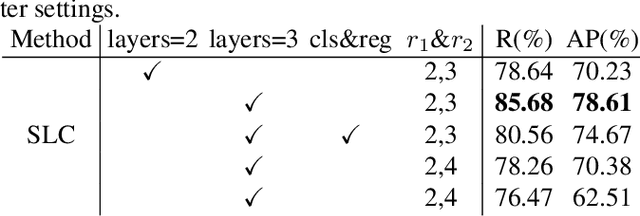
The performance of object instance segmentation in remote sensing images has been greatly improved through the introduction of many landmark frameworks based on convolutional neural network. However, the object densely issue still affects the accuracy of such segmentation frameworks. Objects of the same class are easily confused, which is most likely due to the close docking between objects. We think context information is critical to address this issue. So, we propose a novel framework called SLCMASK-Net, in which a sequence local context module (SLC) is introduced to avoid confusion between objects of the same class. The SLC module applies a sequence of dilation convolution blocks to progressively learn multi-scale context information in the mask branch. Besides, we try to add SLC module to different locations in our framework and experiment with the effect of different parameter settings. Comparative experiments are conducted on remote sensing images acquired by QuickBird with a resolution of $0.5m-1m$ and the results show that the proposed method achieves state-of-the-art performance.