 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYihao Luo
D-IF: Uncertainty-aware Human Digitization via Implicit Distribution Field
Aug 17, 2023
Realistic virtual humans play a crucial role in numerous industries, such as metaverse, intelligent healthcare, and self-driving simulation. But creating them on a large scale with high levels of realism remains a challenge. The utilization of deep implicit function sparks a new era of image-based 3D clothed human reconstruction, enabling pixel-aligned shape recovery with fine details. Subsequently, the vast majority of works locate the surface by regressing the deterministic implicit value for each point. However, should all points be treated equally regardless of their proximity to the surface? In this paper, we propose replacing the implicit value with an adaptive uncertainty distribution, to differentiate between points based on their distance to the surface. This simple ``value to distribution'' transition yields significant improvements on nearly all the baselines. Furthermore, qualitative results demonstrate that the models trained using our uncertainty distribution loss, can capture more intricate wrinkles, and realistic limbs. Code and models are available for research purposes at https://github.com/psyai-net/D-IF_release.
For One-Shot Decoding: Self-supervised Deep Learning-Based Polar Decoder
Jul 30, 2023
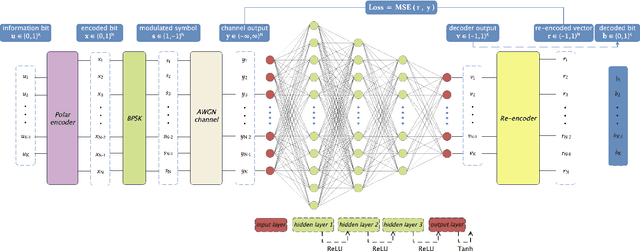
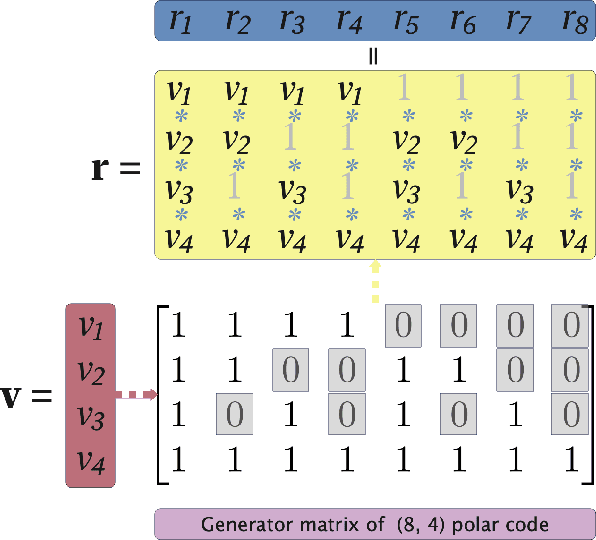

We propose a self-supervised deep learning-based decoding scheme that enables one-shot decoding of polar codes. In the proposed scheme, rather than using the information bit vectors as labels for training the neural network (NN) through supervised learning as the conventional scheme did, the NN is trained to function as a bounded distance decoder by leveraging the generator matrix of polar codes through self-supervised learning. This approach eliminates the reliance on predefined labels, empowering the potential to train directly on the actual data within communication systems and thereby enhancing the applicability. Furthermore, computer simulations demonstrate that (i) the bit error rate (BER) and block error rate (BLER) performances of the proposed scheme can approach those of the maximum a posteriori (MAP) decoder for very short packets and (ii) the proposed NN decoder (NND) exhibits much superior generalization ability compared to the conventional one.
SelfTalk: A Self-Supervised Commutative Training Diagram to Comprehend 3D Talking Faces
Jun 19, 2023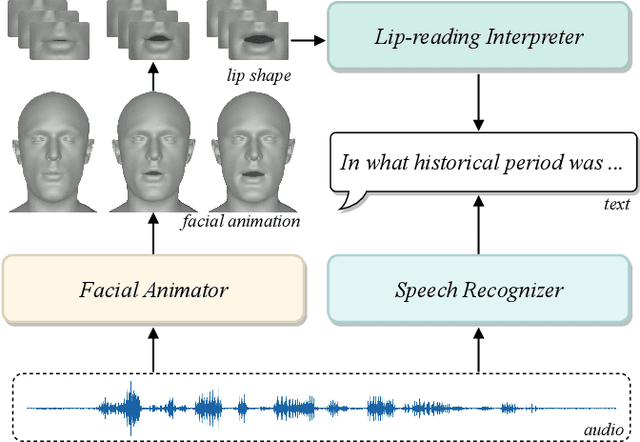
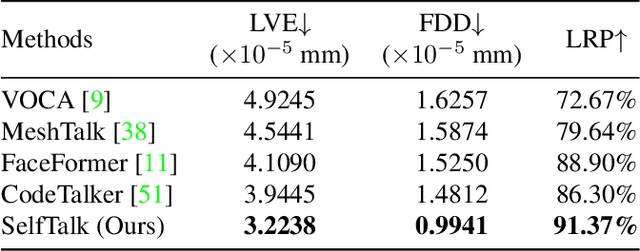
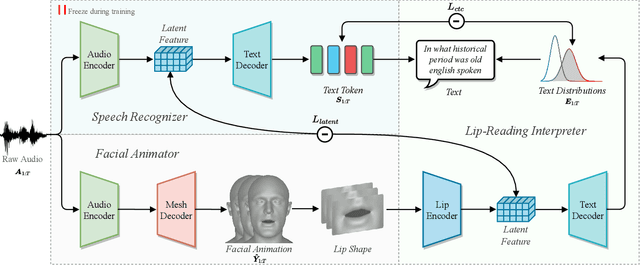
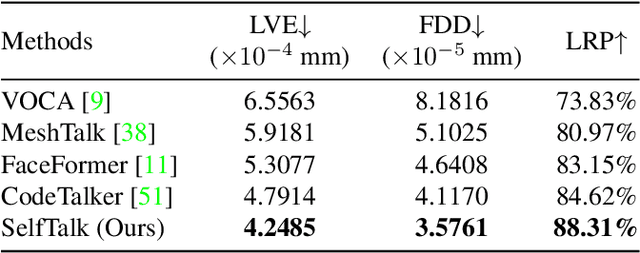
Speech-driven 3D face animation technique, extending its applications to various multimedia fields. Previous research has generated promising realistic lip movements and facial expressions from audio signals. However, traditional regression models solely driven by data face several essential problems, such as difficulties in accessing precise labels and domain gaps between different modalities, leading to unsatisfactory results lacking precision and coherence. To enhance the visual accuracy of generated lip movement while reducing the dependence on labeled data, we propose a novel framework SelfTalk, by involving self-supervision in a cross-modals network system to learn 3D talking faces. The framework constructs a network system consisting of three modules: facial animator, speech recognizer, and lip-reading interpreter. The core of SelfTalk is a commutative training diagram that facilitates compatible features exchange among audio, text, and lip shape, enabling our models to learn the intricate connection between these factors. The proposed framework leverages the knowledge learned from the lip-reading interpreter to generate more plausible lip shapes. Extensive experiments and user studies demonstrate that our proposed approach achieves state-of-the-art performance both qualitatively and quantitatively. We recommend watching the supplementary video.
Training Robust Spiking Neural Networks with ViewPoint Transform and SpatioTemporal Stretching
Mar 14, 2023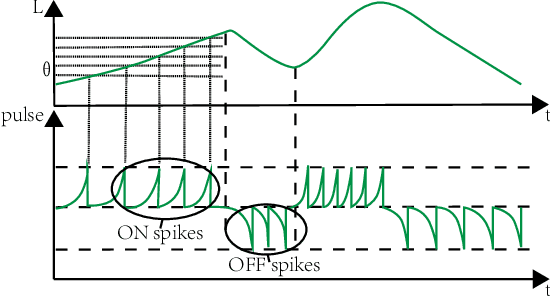
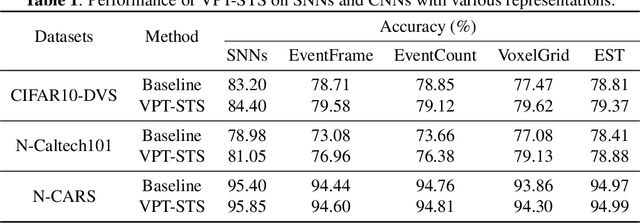
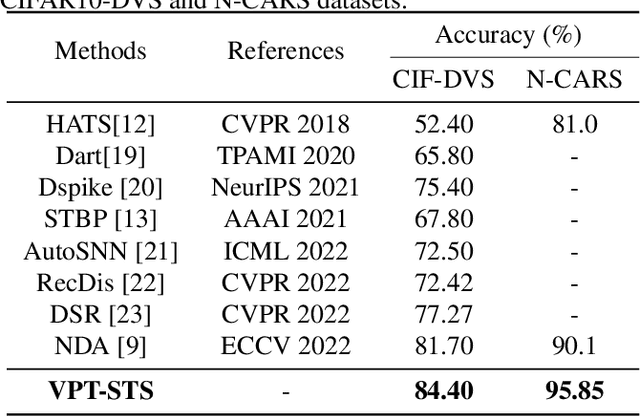
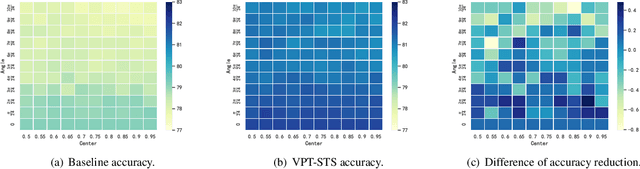
Neuromorphic vision sensors (event cameras) simulate biological visual perception systems and have the advantages of high temporal resolution, less data redundancy, low power consumption, and large dynamic range. Since both events and spikes are modeled from neural signals, event cameras are inherently suitable for spiking neural networks (SNNs), which are considered promising models for artificial intelligence (AI) and theoretical neuroscience. However, the unconventional visual signals of these cameras pose a great challenge to the robustness of spiking neural networks. In this paper, we propose a novel data augmentation method, ViewPoint Transform and SpatioTemporal Stretching (VPT-STS). It improves the robustness of SNNs by transforming the rotation centers and angles in the spatiotemporal domain to generate samples from different viewpoints. Furthermore, we introduce the spatiotemporal stretching to avoid potential information loss in viewpoint transformation. Extensive experiments on prevailing neuromorphic datasets demonstrate that VPT-STS is broadly effective on multi-event representations and significantly outperforms pure spatial geometric transformations. Notably, the SNNs model with VPT-STS achieves a state-of-the-art accuracy of 84.4\% on the DVS-CIFAR10 dataset.
Frequency and Scale Perspectives of Feature Extraction
Feb 24, 2023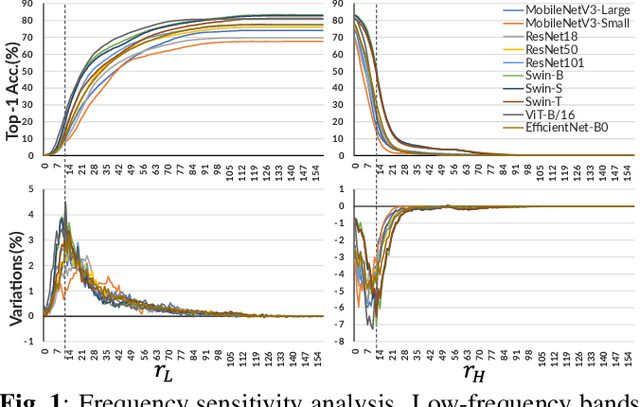
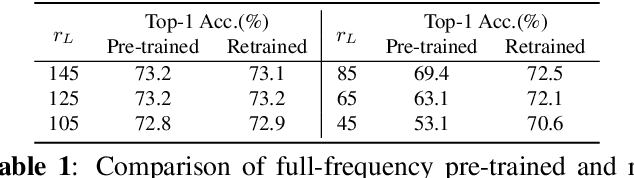

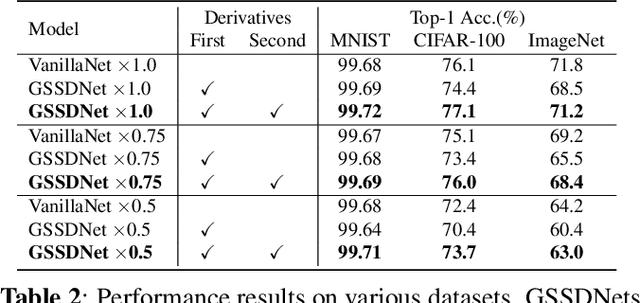
Convolutional neural networks (CNNs) have achieved superior performance but still lack clarity about the nature and properties of feature extraction. In this paper, by analyzing the sensitivity of neural networks to frequencies and scales, we find that neural networks not only have low- and medium-frequency biases but also prefer different frequency bands for different classes, and the scale of objects influences the preferred frequency bands. These observations lead to the hypothesis that neural networks must learn the ability to extract features at various scales and frequencies. To corroborate this hypothesis, we propose a network architecture based on Gaussian derivatives, which extracts features by constructing scale space and employing partial derivatives as local feature extraction operators to separate high-frequency information. This manually designed method of extracting features from different scales allows our GSSDNets to achieve comparable accuracy with vanilla networks on various datasets.
Modeling Associative Plasticity between Synapses to Enhance Learning of Spiking Neural Networks
Jul 24, 2022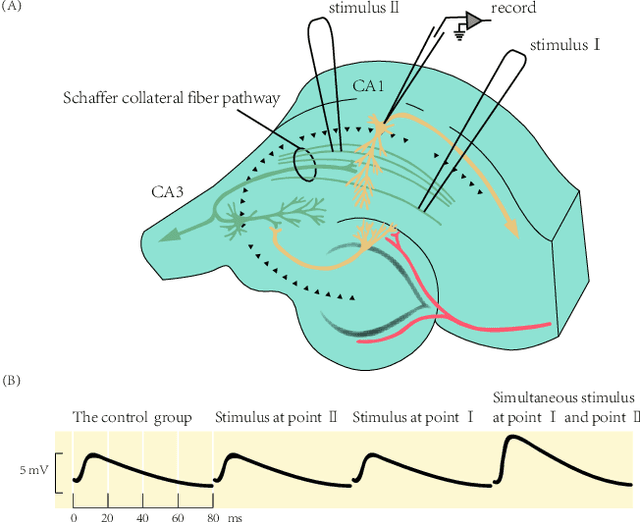

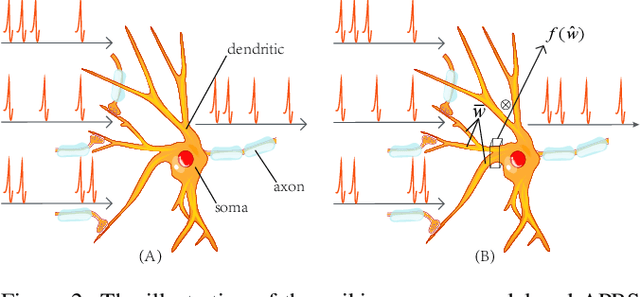
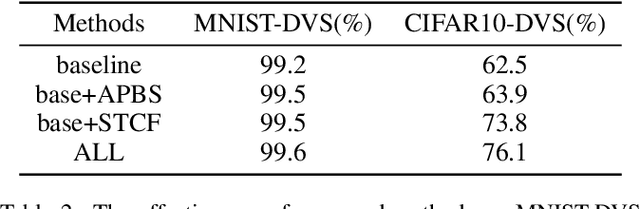
Spiking Neural Networks (SNNs) are the third generation of artificial neural networks that enable energy-efficient implementation on neuromorphic hardware. However, the discrete transmission of spikes brings significant challenges to the robust and high-performance learning mechanism. Most existing works focus solely on learning between neurons but ignore the influence between synapses, resulting in a loss of robustness and accuracy. To address this problem, we propose a robust and effective learning mechanism by modeling the associative plasticity between synapses (APBS) observed from the physiological phenomenon of associative long-term potentiation (ALTP). With the proposed APBS method, synapses of the same neuron interact through a shared factor when concurrently stimulated by other neurons. In addition, we propose a spatiotemporal cropping and flipping (STCF) method to improve the generalization ability of our network. Extensive experiments demonstrate that our approaches achieve superior performance on static CIFAR-10 datasets and state-of-the-art performance on neuromorphic MNIST-DVS, CIFAR10-DVS datasets by a lightweight convolution network. To our best knowledge, this is the first time to explore a learning method between synapses and an extended approach for neuromorphic data.
Improved Regularization of Event-based Learning by Reversing and Drifting
Jul 24, 2022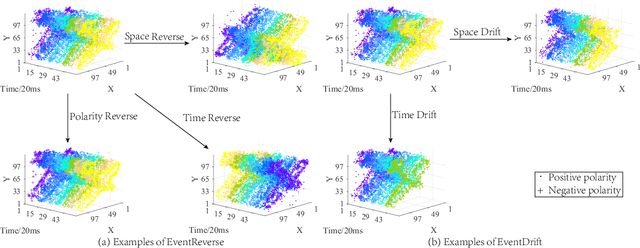

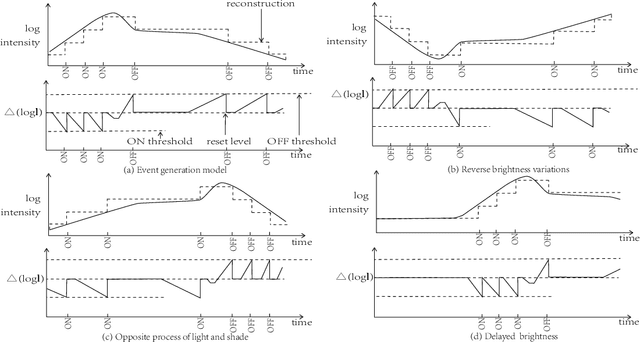
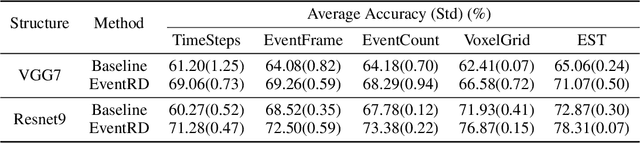
Event camera has an enormous potential in challenging scenes for its advantages of high temporal resolution, high dynamic range, low power consumption, and no motion blur. However, event-based learning is hindered by insufficient generalization ability. In this paper, we first analyze the influence of different brightness variations on event data. Then we propose two novel augmentation methods: EventReverse and EventDrift. By reversing and drifting events to their corresponding positions in the spatiotemporal or polarity domain, the proposed methods generate samples affected by different brightness variations, which improves the robustness of event-based learning and results in a better generalization. Extensive experiments on N-CARS, N-Caltech101 and CIFAR10-DVS datasets demonstrate that our method is general and remarkably effective.
Efficient CNN Architecture Design Guided by Visualization
Jul 21, 2022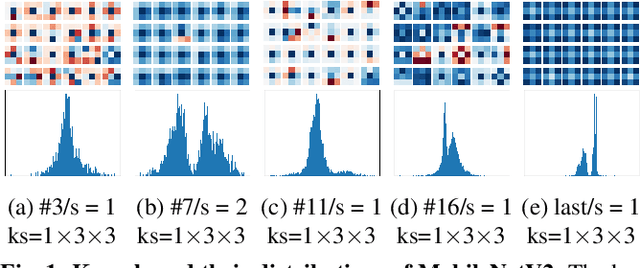
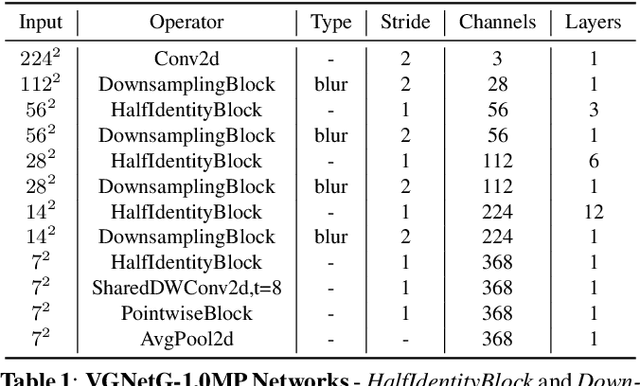
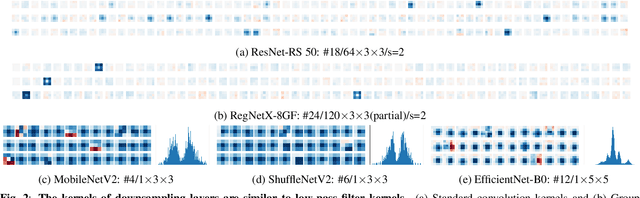
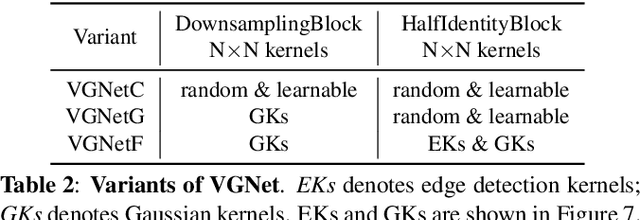
Modern efficient Convolutional Neural Networks(CNNs) always use Depthwise Separable Convolutions(DSCs) and Neural Architecture Search(NAS) to reduce the number of parameters and the computational complexity. But some inherent characteristics of networks are overlooked. Inspired by visualizing feature maps and N$\times$N(N$>$1) convolution kernels, several guidelines are introduced in this paper to further improve parameter efficiency and inference speed. Based on these guidelines, our parameter-efficient CNN architecture, called \textit{VGNetG}, achieves better accuracy and lower latency than previous networks with about 30%$\thicksim$50% parameters reduction. Our VGNetG-1.0MP achieves 67.7% top-1 accuracy with 0.99M parameters and 69.2% top-1 accuracy with 1.14M parameters on ImageNet classification dataset. Furthermore, we demonstrate that edge detectors can replace learnable depthwise convolution layers to mix features by replacing the N$\times$N kernels with fixed edge detection kernels. And our VGNetF-1.5MP archives 64.4%(-3.2%) top-1 accuracy and 66.2%(-1.4%) top-1 accuracy with additional Gaussian kernels.
Dynamic Multi-Scale Loss Optimization for Object Detection
Aug 09, 2021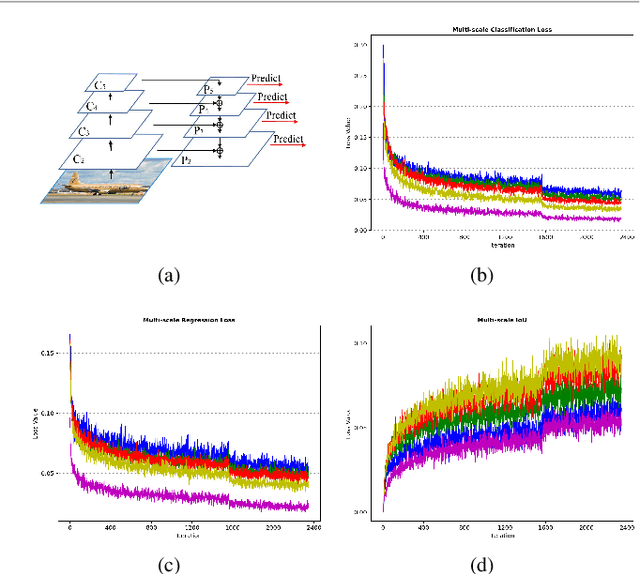
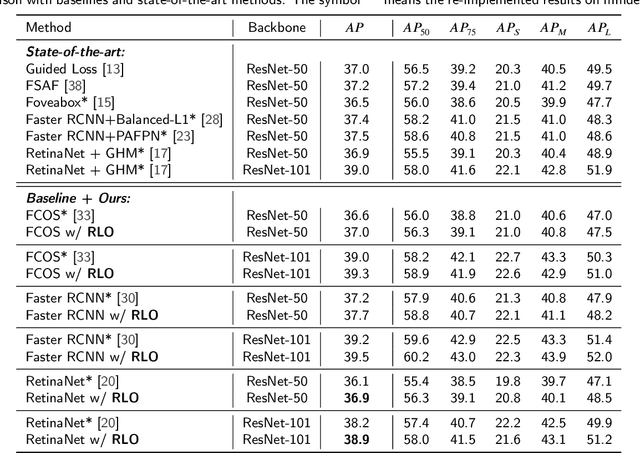
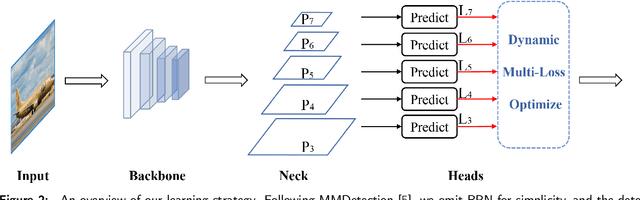
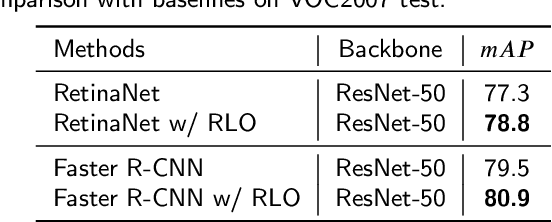
With the continuous improvement of the performance of object detectors via advanced model architectures, imbalance problems in the training process have received more attention. It is a common paradigm in object detection frameworks to perform multi-scale detection. However, each scale is treated equally during training. In this paper, we carefully study the objective imbalance of multi-scale detector training. We argue that the loss in each scale level is neither equally important nor independent. Different from the existing solutions of setting multi-task weights, we dynamically optimize the loss weight of each scale level in the training process. Specifically, we propose an Adaptive Variance Weighting (AVW) to balance multi-scale loss according to the statistical variance. Then we develop a novel Reinforcement Learning Optimization (RLO) to decide the weighting scheme probabilistically during training. The proposed dynamic methods make better utilization of multi-scale training loss without extra computational complexity and learnable parameters for backpropagation. Experiments show that our approaches can consistently boost the performance over various baseline detectors on Pascal VOC and MS COCO benchmark.
AWCD: An Efficient Point Cloud Processing Approach via Wasserstein Curvature
May 11, 2021



In this paper, we introduce the adaptive Wasserstein curvature denoising (AWCD), an original processing approach for point cloud data. By collecting curvatures information from Wasserstein distance, AWCD consider more precise structures of data and preserves stability and effectiveness even for data with noise in high density. This paper contains some theoretical analysis about the Wasserstein curvature and the complete algorithm of AWCD. In addition, we design digital experiments to show the denoising effect of AWCD. According to comparison results, we present the advantages of AWCD against traditional algorithms.