 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAlessandro Simoni
Robot Pose Nowcasting: Forecast the Future to Improve the Present
Aug 24, 2023
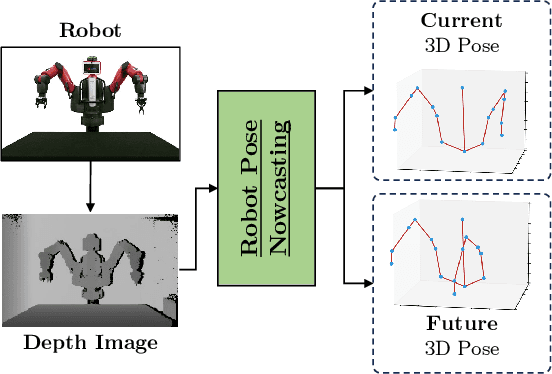
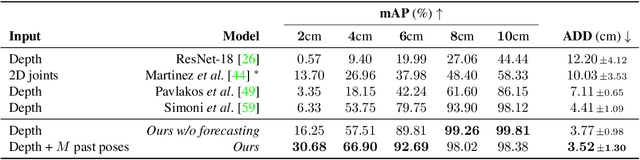
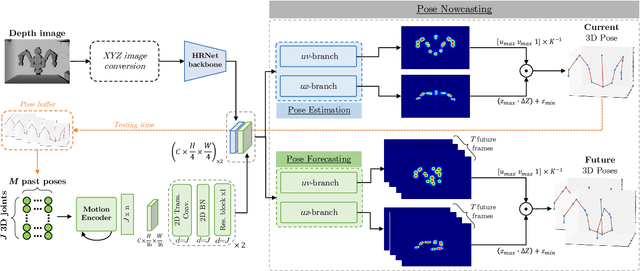
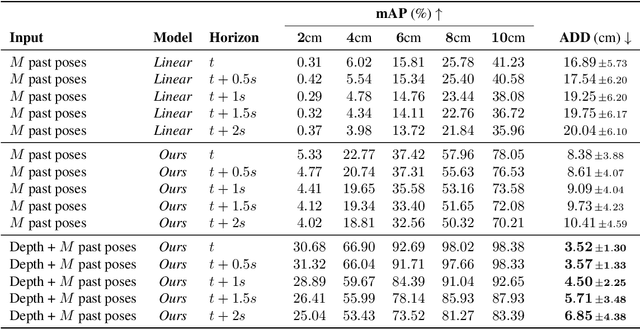
In recent years, the effective and safe collaboration between humans and machines has gained significant importance, particularly in the Industry 4.0 scenario. A critical prerequisite for realizing this collaborative paradigm is precisely understanding the robot's 3D pose within its environment. Therefore, in this paper, we introduce a novel vision-based system leveraging depth data to accurately establish the 3D locations of robotic joints. Specifically, we prove the ability of the proposed system to enhance its current pose estimation accuracy by jointly learning to forecast future poses. Indeed, we introduce the concept of Pose Nowcasting, denoting the capability of a system to exploit the learned knowledge of the future to improve the estimation of the present. The experimental evaluation is conducted on two different datasets, providing state-of-the-art and real-time performance and confirming the validity of the proposed method on both the robotic and human scenarios.
CarPatch: A Synthetic Benchmark for Radiance Field Evaluation on Vehicle Components
Jul 24, 2023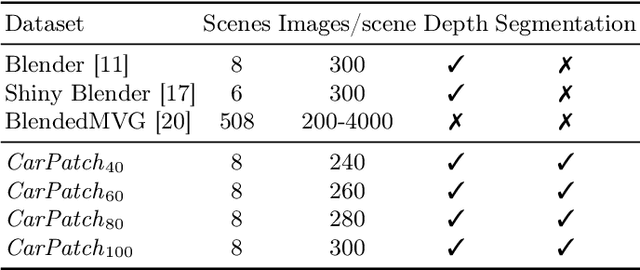
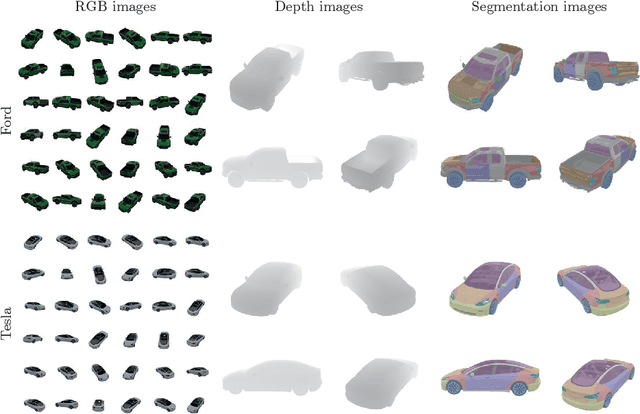
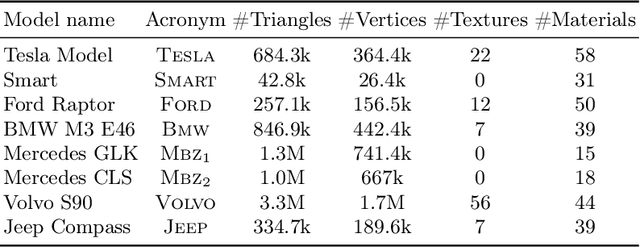
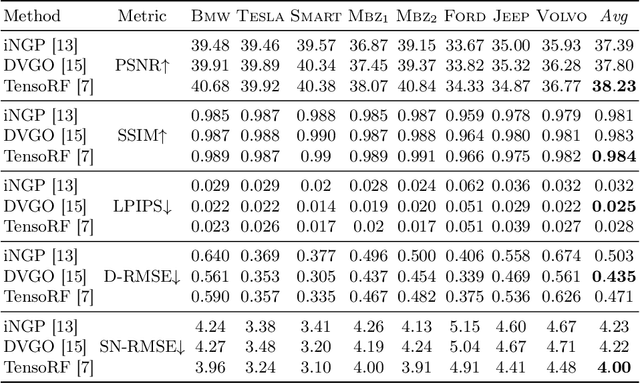
Neural Radiance Fields (NeRFs) have gained widespread recognition as a highly effective technique for representing 3D reconstructions of objects and scenes derived from sets of images. Despite their efficiency, NeRF models can pose challenges in certain scenarios such as vehicle inspection, where the lack of sufficient data or the presence of challenging elements (e.g. reflections) strongly impact the accuracy of the reconstruction. To this aim, we introduce CarPatch, a novel synthetic benchmark of vehicles. In addition to a set of images annotated with their intrinsic and extrinsic camera parameters, the corresponding depth maps and semantic segmentation masks have been generated for each view. Global and part-based metrics have been defined and used to evaluate, compare, and better characterize some state-of-the-art techniques. The dataset is publicly released at https://aimagelab.ing.unimore.it/go/carpatch and can be used as an evaluation guide and as a baseline for future work on this challenging topic.
Semi-Perspective Decoupled Heatmaps for 3D Robot Pose Estimation from Depth Maps
Jul 06, 2022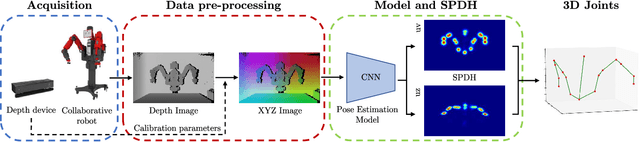
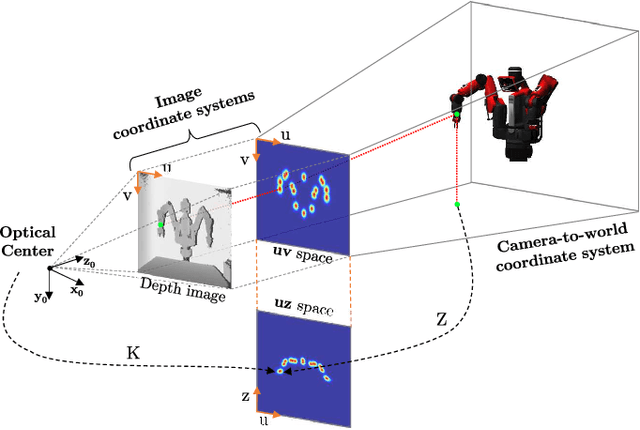
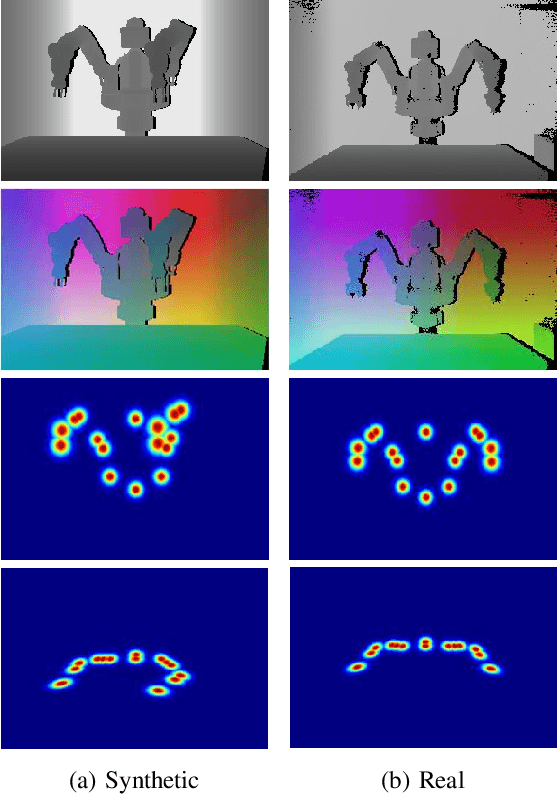
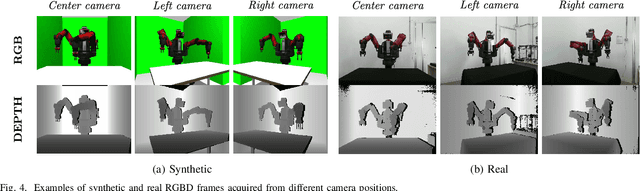
Knowing the exact 3D location of workers and robots in a collaborative environment enables several real applications, such as the detection of unsafe situations or the study of mutual interactions for statistical and social purposes. In this paper, we propose a non-invasive and light-invariant framework based on depth devices and deep neural networks to estimate the 3D pose of robots from an external camera. The method can be applied to any robot without requiring hardware access to the internal states. We introduce a novel representation of the predicted pose, namely Semi-Perspective Decoupled Heatmaps (SPDH), to accurately compute 3D joint locations in world coordinates adapting efficient deep networks designed for the 2D Human Pose Estimation. The proposed approach, which takes as input a depth representation based on XYZ coordinates, can be trained on synthetic depth data and applied to real-world settings without the need for domain adaptation techniques. To this end, we present the SimBa dataset, based on both synthetic and real depth images, and use it for the experimental evaluation. Results show that the proposed approach, made of a specific depth map representation and the SPDH, overcomes the current state of the art.
Multi-Category Mesh Reconstruction From Image Collections
Oct 21, 2021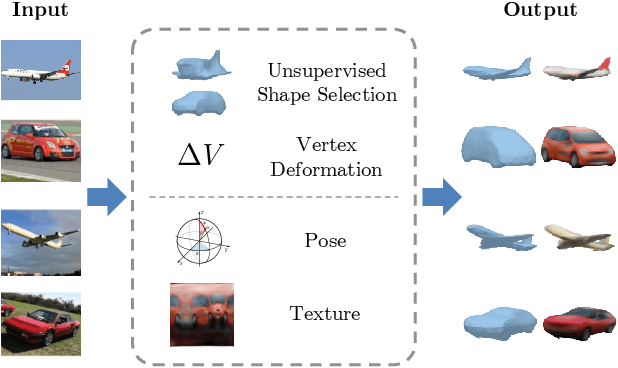

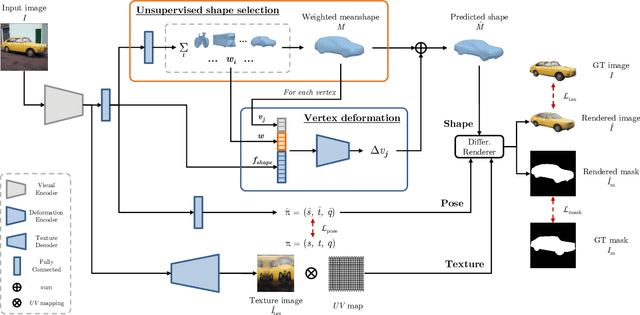
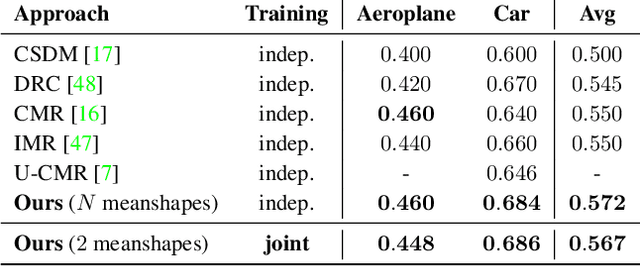
Recently, learning frameworks have shown the capability of inferring the accurate shape, pose, and texture of an object from a single RGB image. However, current methods are trained on image collections of a single category in order to exploit specific priors, and they often make use of category-specific 3D templates. In this paper, we present an alternative approach that infers the textured mesh of objects combining a series of deformable 3D models and a set of instance-specific deformation, pose, and texture. Differently from previous works, our method is trained with images of multiple object categories using only foreground masks and rough camera poses as supervision. Without specific 3D templates, the framework learns category-level models which are deformed to recover the 3D shape of the depicted object. The instance-specific deformations are predicted independently for each vertex of the learned 3D mesh, enabling the dynamic subdivision of the mesh during the training process. Experiments show that the proposed framework can distinguish between different object categories and learn category-specific shape priors in an unsupervised manner. Predicted shapes are smooth and can leverage from multiple steps of subdivision during the training process, obtaining comparable or state-of-the-art results on two public datasets. Models and code are publicly released.
SHREC 2021: Track on Skeleton-based Hand Gesture Recognition in the Wild
Jun 21, 2021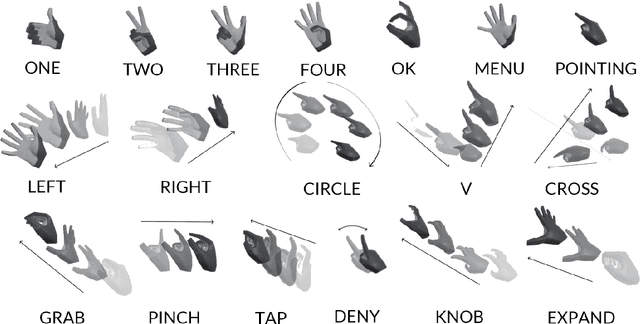
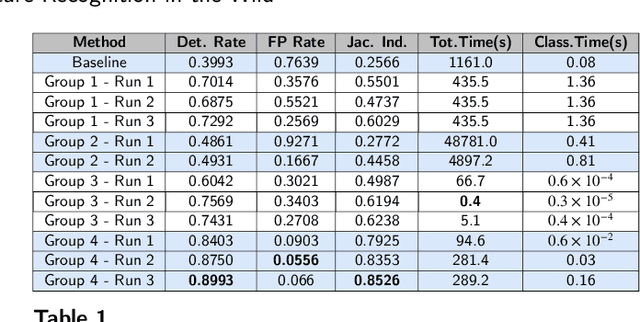
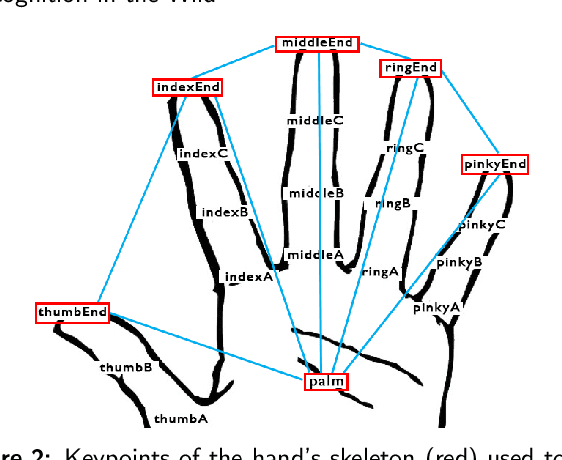
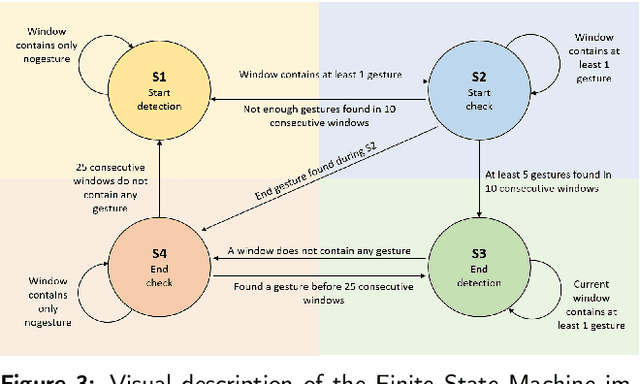
Gesture recognition is a fundamental tool to enable novel interaction paradigms in a variety of application scenarios like Mixed Reality environments, touchless public kiosks, entertainment systems, and more. Recognition of hand gestures can be nowadays performed directly from the stream of hand skeletons estimated by software provided by low-cost trackers (Ultraleap) and MR headsets (Hololens, Oculus Quest) or by video processing software modules (e.g. Google Mediapipe). Despite the recent advancements in gesture and action recognition from skeletons, it is unclear how well the current state-of-the-art techniques can perform in a real-world scenario for the recognition of a wide set of heterogeneous gestures, as many benchmarks do not test online recognition and use limited dictionaries. This motivated the proposal of the SHREC 2021: Track on Skeleton-based Hand Gesture Recognition in the Wild. For this contest, we created a novel dataset with heterogeneous gestures featuring different types and duration. These gestures have to be found inside sequences in an online recognition scenario. This paper presents the result of the contest, showing the performances of the techniques proposed by four research groups on the challenging task compared with a simple baseline method.
Future Urban Scenes Generation Through Vehicles Synthesis
Jul 01, 2020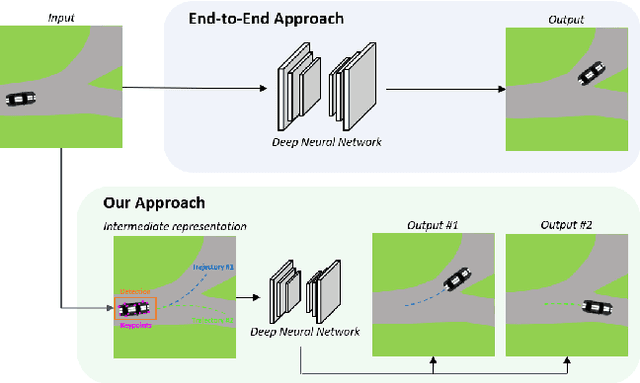
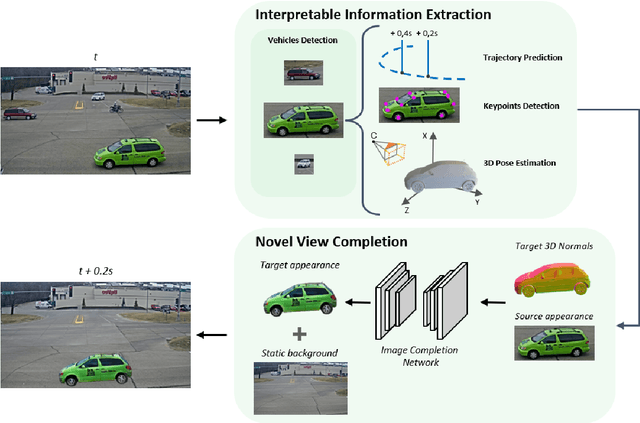
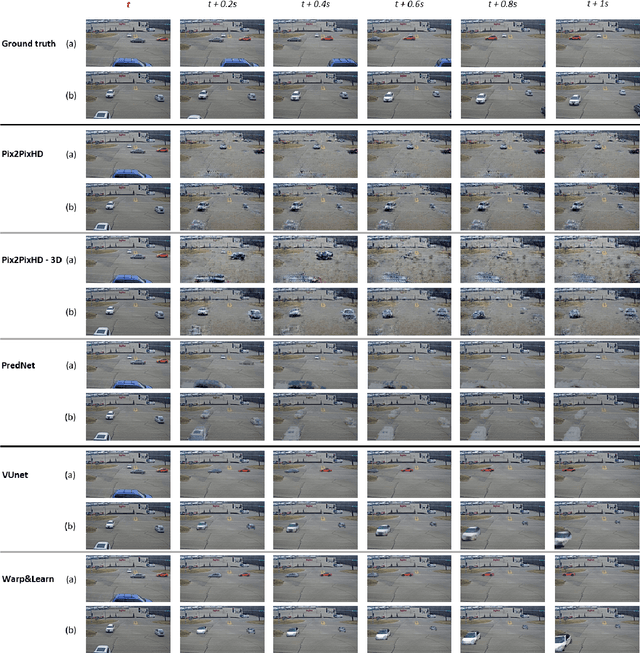
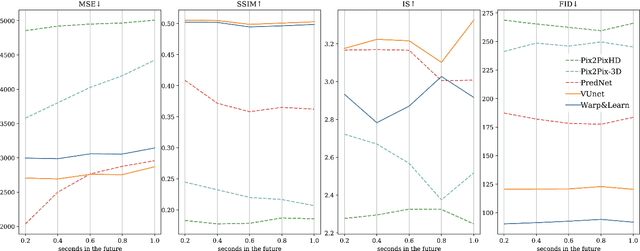
In this work we propose a deep learning pipeline to predict the visual future appearance of an urban scene. Despite recent advances, generating the entire scene in an end-to-end fashion is still far from being achieved. Instead, here we follow a two stages approach, where interpretable information is included in the loop and each actor is modelled independently. We leverage a per-object novel view synthesis paradigm; i.e. generating a synthetic representation of an object undergoing a geometrical roto-translation in the 3D space. Our model can be easily conditioned with constraints (e.g. input trajectories) provided by state-of-the-art tracking methods or by the user itself. This allows us to generate a set of diverse realistic futures starting from the same input in a multi-modal fashion. We visually and quantitatively show the superiority of this approach over traditional end-to-end scene-generation methods on CityFlow, a challenging real world dataset.