 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBin Fang
Simulation of Optical Tactile Sensors Supporting Slip and Rotation using Path Tracing and IMPM
May 05, 2024
Optical tactile sensors are extensively utilized in intelligent robot manipulation due to their ability to acquire high-resolution tactile information at a lower cost. However, achieving adequate reality and versatility in simulating optical tactile sensors is challenging. In this paper, we propose a simulation method and validate its effectiveness through experiments. We utilize path tracing for image rendering, achieving higher similarity to real data than the baseline method in simulating pressing scenarios. Additionally, we apply the improved Material Point Method(IMPM) algorithm to simulate the relative rest between the object and the elastomer surface when the object is in motion, enabling more accurate simulation of complex manipulations such as slip and rotation.
What Foundation Models can Bring for Robot Learning in Manipulation : A Survey
Apr 28, 2024The realization of universal robots is an ultimate goal of researchers. However, a key hurdle in achieving this goal lies in the robots' ability to manipulate objects in their unstructured surrounding environments according to different tasks. The learning-based approach is considered an effective way to address generalization. The impressive performance of foundation models in the fields of computer vision and natural language suggests the potential of embedding foundation models into manipulation tasks as a viable path toward achieving general manipulation capability. However, we believe achieving general manipulation capability requires an overarching framework akin to auto driving. This framework should encompass multiple functional modules, with different foundation models assuming distinct roles in facilitating general manipulation capability. This survey focuses on the contributions of foundation models to robot learning for manipulation. We propose a comprehensive framework and detail how foundation models can address challenges in each module of the framework. What's more, we examine current approaches, outline challenges, suggest future research directions, and identify potential risks associated with integrating foundation models into this domain.
Towards Comprehensive Multimodal Perception: Introducing the Touch-Language-Vision Dataset
Mar 14, 2024
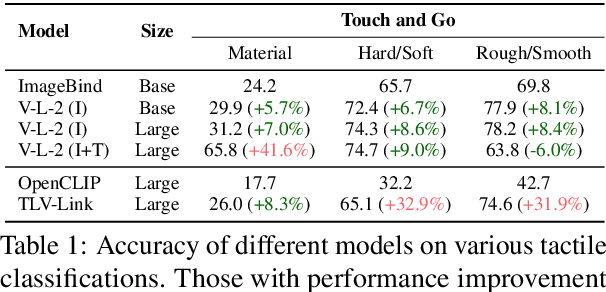
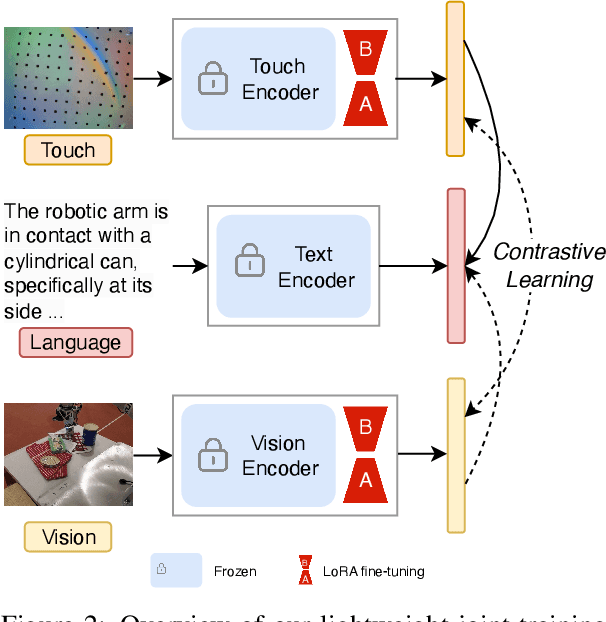
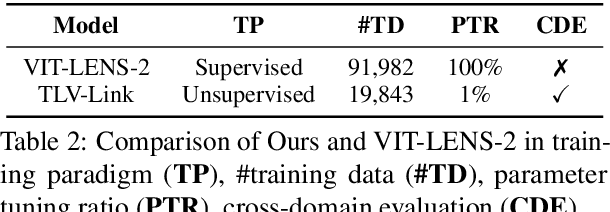
Tactility provides crucial support and enhancement for the perception and interaction capabilities of both humans and robots. Nevertheless, the multimodal research related to touch primarily focuses on visual and tactile modalities, with limited exploration in the domain of language. Beyond vocabulary, sentence-level descriptions contain richer semantics. Based on this, we construct a touch-language-vision dataset named TLV (Touch-Language-Vision) by human-machine cascade collaboration, featuring sentence-level descriptions for multimode alignment. The new dataset is used to fine-tune our proposed lightweight training framework, TLV-Link (Linking Touch, Language, and Vision through Alignment), achieving effective semantic alignment with minimal parameter adjustments (1%). Project Page: https://xiaoen0.github.io/touch.page/.
A Lightweight Parallel Framework for Blind Image Quality Assessment
Feb 19, 2024Existing blind image quality assessment (BIQA) methods focus on designing complicated networks based on convolutional neural networks (CNNs) or transformer. In addition, some BIQA methods enhance the performance of the model in a two-stage training manner. Despite the significant advancements, these methods remarkably raise the parameter count of the model, thus requiring more training time and computational resources. To tackle the above issues, we propose a lightweight parallel framework (LPF) for BIQA. First, we extract the visual features using a pre-trained feature extraction network. Furthermore, we construct a simple yet effective feature embedding network (FEN) to transform the visual features, aiming to generate the latent representations that contain salient distortion information. To improve the robustness of the latent representations, we present two novel self-supervised subtasks, including a sample-level category prediction task and a batch-level quality comparison task. The sample-level category prediction task is presented to help the model with coarse-grained distortion perception. The batch-level quality comparison task is formulated to enhance the training data and thus improve the robustness of the latent representations. Finally, the latent representations are fed into a distortion-aware quality regression network (DaQRN), which simulates the human vision system (HVS) and thus generates accurate quality scores. Experimental results on multiple benchmark datasets demonstrate that the proposed method achieves superior performance over state-of-the-art approaches. Moreover, extensive analyses prove that the proposed method has lower computational complexity and faster convergence speed.
Hierarchical Visual Policy Learning for Long-Horizon Robot Manipulation in Densely Cluttered Scenes
Dec 05, 2023In this work, we focus on addressing the long-horizon manipulation tasks in densely cluttered scenes. Such tasks require policies to effectively manage severe occlusions among objects and continually produce actions based on visual observations. We propose a vision-based Hierarchical policy for Cluttered-scene Long-horizon Manipulation (HCLM). It employs a high-level policy and three options to select and instantiate three parameterized action primitives: push, pick, and place. We first train the pick and place options by behavior cloning (BC). Subsequently, we use hierarchical reinforcement learning (HRL) to train the high-level policy and push option. During HRL, we propose a Spatially Extended Q-update (SEQ) to augment the updates for the push option and a Two-Stage Update Scheme (TSUS) to alleviate the non-stationary transition problem in updating the high-level policy. We demonstrate that HCLM significantly outperforms baseline methods in terms of success rate and efficiency in diverse tasks. We also highlight our method's ability to generalize to more cluttered environments with more additional blocks.
RobotGPT: Robot Manipulation Learning from ChatGPT
Dec 03, 2023We present RobotGPT, an innovative decision framework for robotic manipulation that prioritizes stability and safety. The execution code generated by ChatGPT cannot guarantee the stability and safety of the system. ChatGPT may provide different answers for the same task, leading to unpredictability. This instability prevents the direct integration of ChatGPT into the robot manipulation loop. Although setting the temperature to 0 can generate more consistent outputs, it may cause ChatGPT to lose diversity and creativity. Our objective is to leverage ChatGPT's problem-solving capabilities in robot manipulation and train a reliable agent. The framework includes an effective prompt structure and a robust learning model. Additionally, we introduce a metric for measuring task difficulty to evaluate ChatGPT's performance in robot manipulation. Furthermore, we evaluate RobotGPT in both simulation and real-world environments. Compared to directly using ChatGPT to generate code, our framework significantly improves task success rates, with an average increase from 38.5% to 91.5%. Therefore, training a RobotGPT by utilizing ChatGPT as an expert is a more stable approach compared to directly using ChatGPT as a task planner.
Towards Generalizable Data Protection With Transferable Unlearnable Examples
May 18, 2023



Artificial Intelligence (AI) is making a profound impact in almost every domain. One of the crucial factors contributing to this success has been the access to an abundance of high-quality data for constructing machine learning models. Lately, as the role of data in artificial intelligence has been significantly magnified, concerns have arisen regarding the secure utilization of data, particularly in the context of unauthorized data usage. To mitigate data exploitation, data unlearning have been introduced to render data unexploitable. However, current unlearnable examples lack the generalization required for wide applicability. In this paper, we present a novel, generalizable data protection method by generating transferable unlearnable examples. To the best of our knowledge, this is the first solution that examines data privacy from the perspective of data distribution. Through extensive experimentation, we substantiate the enhanced generalizable protection capabilities of our proposed method.
Re-thinking Data Availablity Attacks Against Deep Neural Networks
May 18, 2023



The unauthorized use of personal data for commercial purposes and the clandestine acquisition of private data for training machine learning models continue to raise concerns. In response to these issues, researchers have proposed availability attacks that aim to render data unexploitable. However, many current attack methods are rendered ineffective by adversarial training. In this paper, we re-examine the concept of unlearnable examples and discern that the existing robust error-minimizing noise presents an inaccurate optimization objective. Building on these observations, we introduce a novel optimization paradigm that yields improved protection results with reduced computational time requirements. We have conducted extensive experiments to substantiate the soundness of our approach. Moreover, our method establishes a robust foundation for future research in this area.
Deep Reinforcement Learning for Robotic Pushing and Picking in Cluttered Environment
Feb 21, 2023



In this paper, a novel robotic grasping system is established to automatically pick up objects in cluttered scenes. A composite robotic hand composed of a suction cup and a gripper is designed for grasping the object stably. The suction cup is used for lifting the object from the clutter first and the gripper for grasping the object accordingly. We utilize the affordance map to provide pixel-wise lifting point candidates for the suction cup. To obtain a good affordance map, the active exploration mechanism is introduced to the system. An effective metric is designed to calculate the reward for the current affordance map, and a deep Q-Network (DQN) is employed to guide the robotic hand to actively explore the environment until the generated affordance map is suitable for grasping. Experimental results have demonstrated that the proposed robotic grasping system is able to greatly increase the success rate of the robotic grasping in cluttered scenes.
* has been accepted by IEEE/RSJ International Conference on Intelligent Robots and Systems 2019
Tacchi: A Pluggable and Low Computational Cost Elastomer Deformation Simulator for Optical Tactile Sensors
Jan 19, 2023



Simulation is widely applied in robotics research to save time and resources. There have been several works to simulate optical tactile sensors that leverage either a smoothing method or Finite Element Method (FEM). However, elastomer deformation physics is not considered in the former method, whereas the latter requires a massive amount of computational resources like a computer cluster. In this work, we propose a pluggable and low computational cost simulator using the Taichi programming language for simulating optical tactile sensors, named as Tacchi . It reconstructs elastomer deformation using particles, which allows deformed elastomer surfaces to be rendered into tactile images and reveals contact information without suffering from high computational costs. Tacchi facilitates creating realistic tactile images in simulation, e.g., ones that capture wear-and-tear defects on object surfaces. In addition, the proposed Tacchi can be integrated with robotics simulators for a robot system simulation. Experiment results showed that Tacchi can produce images with better similarity to real images and achieved higher Sim2Real accuracy compared to the existing methods. Moreover, it can be connected with MuJoCo and Gazebo with only the requirement of 1G memory space in GPU compared to a computer cluster applied for FEM. With Tacchi, physical robot simulation with optical tactile sensors becomes possible. All the materials in this paper are available at https://github.com/zixichen007115/Tacchi .