 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCheng Zhao
TCLC-GS: Tightly Coupled LiDAR-Camera Gaussian Splatting for Surrounding Autonomous Driving Scenes
Apr 03, 2024
Most 3D Gaussian Splatting (3D-GS) based methods for urban scenes initialize 3D Gaussians directly with 3D LiDAR points, which not only underutilizes LiDAR data capabilities but also overlooks the potential advantages of fusing LiDAR with camera data. In this paper, we design a novel tightly coupled LiDAR-Camera Gaussian Splatting (TCLC-GS) to fully leverage the combined strengths of both LiDAR and camera sensors, enabling rapid, high-quality 3D reconstruction and novel view RGB/depth synthesis. TCLC-GS designs a hybrid explicit (colorized 3D mesh) and implicit (hierarchical octree feature) 3D representation derived from LiDAR-camera data, to enrich the properties of 3D Gaussians for splatting. 3D Gaussian's properties are not only initialized in alignment with the 3D mesh which provides more completed 3D shape and color information, but are also endowed with broader contextual information through retrieved octree implicit features. During the Gaussian Splatting optimization process, the 3D mesh offers dense depth information as supervision, which enhances the training process by learning of a robust geometry. Comprehensive evaluations conducted on the Waymo Open Dataset and nuScenes Dataset validate our method's state-of-the-art (SOTA) performance. Utilizing a single NVIDIA RTX 3090 Ti, our method demonstrates fast training and achieves real-time RGB and depth rendering at 90 FPS in resolution of 1920x1280 (Waymo), and 120 FPS in resolution of 1600x900 (nuScenes) in urban scenarios.
Behind the Veil: Enhanced Indoor 3D Scene Reconstruction with Occluded Surfaces Completion
Apr 03, 2024In this paper, we present a novel indoor 3D reconstruction method with occluded surface completion, given a sequence of depth readings. Prior state-of-the-art (SOTA) methods only focus on the reconstruction of the visible areas in a scene, neglecting the invisible areas due to the occlusions, e.g., the contact surface between furniture, occluded wall and floor. Our method tackles the task of completing the occluded scene surfaces, resulting in a complete 3D scene mesh. The core idea of our method is learning 3D geometry prior from various complete scenes to infer the occluded geometry of an unseen scene from solely depth measurements. We design a coarse-fine hierarchical octree representation coupled with a dual-decoder architecture, i.e., Geo-decoder and 3D Inpainter, which jointly reconstructs the complete 3D scene geometry. The Geo-decoder with detailed representation at fine levels is optimized online for each scene to reconstruct visible surfaces. The 3D Inpainter with abstract representation at coarse levels is trained offline using various scenes to complete occluded surfaces. As a result, while the Geo-decoder is specialized for an individual scene, the 3D Inpainter can be generally applied across different scenes. We evaluate the proposed method on the 3D Completed Room Scene (3D-CRS) and iTHOR datasets, significantly outperforming the SOTA methods by a gain of 16.8% and 24.2% in terms of the completeness of 3D reconstruction. 3D-CRS dataset including a complete 3D mesh of each scene is provided at project webpage.
UPNeRF: A Unified Framework for Monocular 3D Object Reconstruction and Pose Estimation
Mar 23, 2024Monocular 3D reconstruction for categorical objects heavily relies on accurately perceiving each object's pose. While gradient-based optimization within a NeRF framework updates initially given poses, this paper highlights that such a scheme fails when the initial pose even moderately deviates from the true pose. Consequently, existing methods often depend on a third-party 3D object to provide an initial object pose, leading to increased complexity and generalization issues. To address these challenges, we present UPNeRF, a Unified framework integrating Pose estimation and NeRF-based reconstruction, bringing us closer to real-time monocular 3D object reconstruction. UPNeRF decouples the object's dimension estimation and pose refinement to resolve the scale-depth ambiguity, and introduces an effective projected-box representation that generalizes well cross different domains. While using a dedicated pose estimator that smoothly integrates into an object-centric NeRF, UPNeRF is free from external 3D detectors. UPNeRF achieves state-of-the-art results in both reconstruction and pose estimation tasks on the nuScenes dataset. Furthermore, UPNeRF exhibits exceptional Cross-dataset generalization on the KITTI and Waymo datasets, surpassing prior methods with up to 50% reduction in rotation and translation error.
3D Copy-Paste: Physically Plausible Object Insertion for Monocular 3D Detection
Dec 08, 2023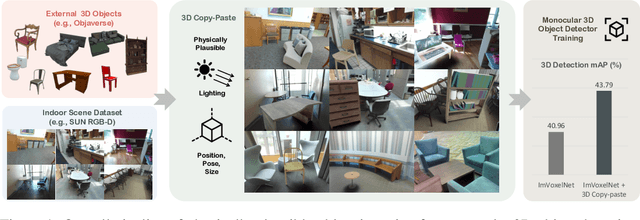

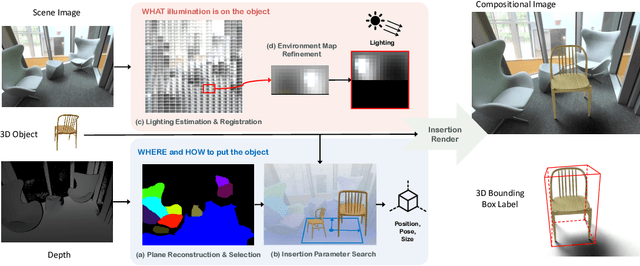

A major challenge in monocular 3D object detection is the limited diversity and quantity of objects in real datasets. While augmenting real scenes with virtual objects holds promise to improve both the diversity and quantity of the objects, it remains elusive due to the lack of an effective 3D object insertion method in complex real captured scenes. In this work, we study augmenting complex real indoor scenes with virtual objects for monocular 3D object detection. The main challenge is to automatically identify plausible physical properties for virtual assets (e.g., locations, appearances, sizes, etc.) in cluttered real scenes. To address this challenge, we propose a physically plausible indoor 3D object insertion approach to automatically copy virtual objects and paste them into real scenes. The resulting objects in scenes have 3D bounding boxes with plausible physical locations and appearances. In particular, our method first identifies physically feasible locations and poses for the inserted objects to prevent collisions with the existing room layout. Subsequently, it estimates spatially-varying illumination for the insertion location, enabling the immersive blending of the virtual objects into the original scene with plausible appearances and cast shadows. We show that our augmentation method significantly improves existing monocular 3D object models and achieves state-of-the-art performance. For the first time, we demonstrate that a physically plausible 3D object insertion, serving as a generative data augmentation technique, can lead to significant improvements for discriminative downstream tasks such as monocular 3D object detection. Project website: https://gyhandy.github.io/3D-Copy-Paste/
3D ToF LiDAR in Mobile Robotics: A Review
Feb 22, 2022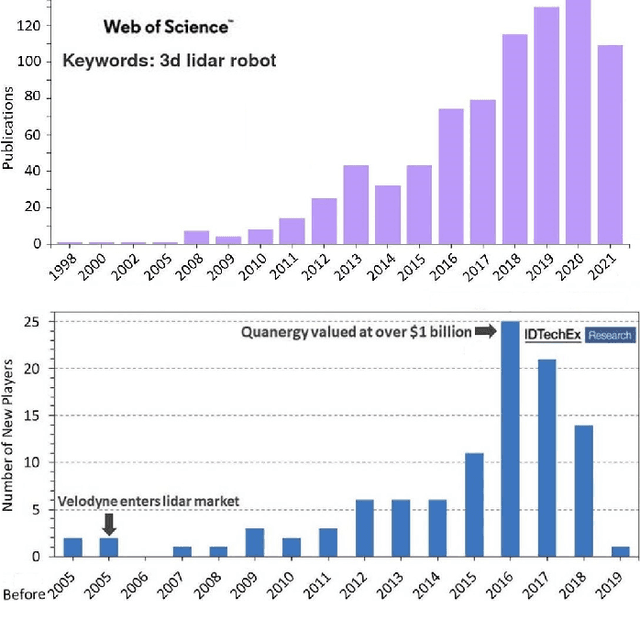
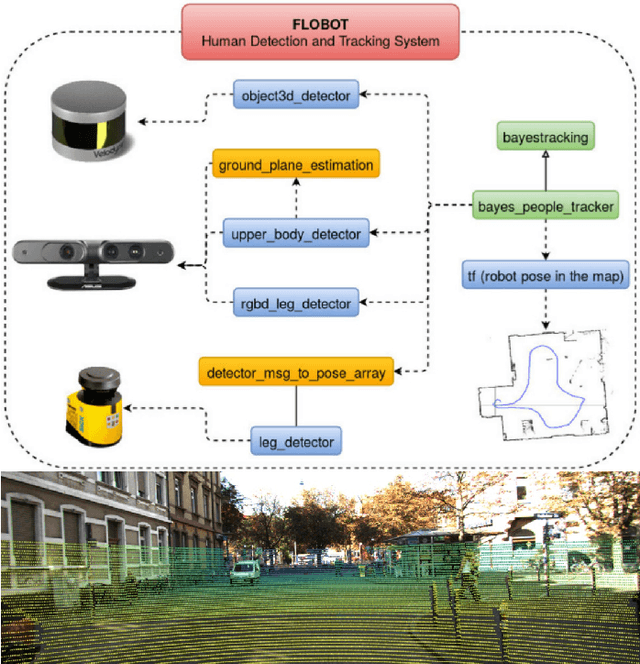
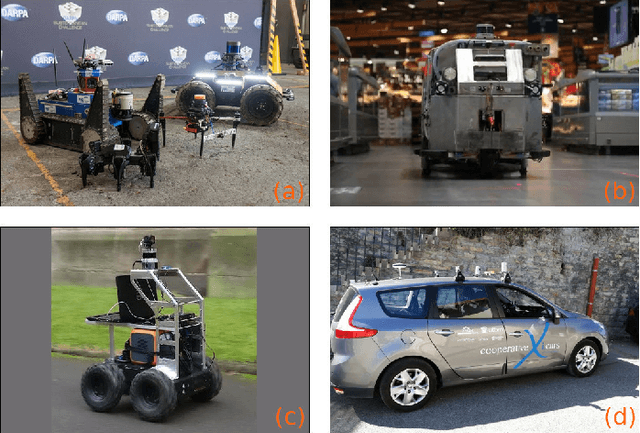
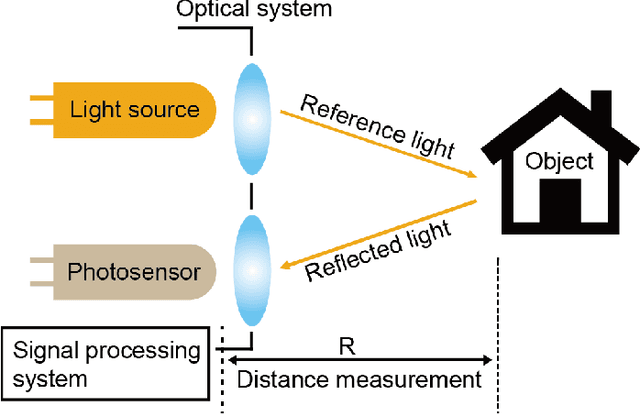
In the past ten years, the use of 3D Time-of-Flight (ToF) LiDARs in mobile robotics has grown rapidly. Based on our accumulation of relevant research, this article systematically reviews and analyzes the use 3D ToF LiDARs in research and industrial applications. The former includes object detection, robot localization, long-term autonomy, LiDAR data processing under adverse weather conditions, and sensor fusion. The latter encompasses service robots, assisted and autonomous driving, and recent applications performed in response to public health crises. We hope that our efforts can effectively provide readers with relevant references and promote the deployment of existing mature technologies in real-world systems.
NDT-Transformer: Large-Scale 3D Point Cloud Localisation using the Normal Distribution Transform Representation
Mar 23, 2021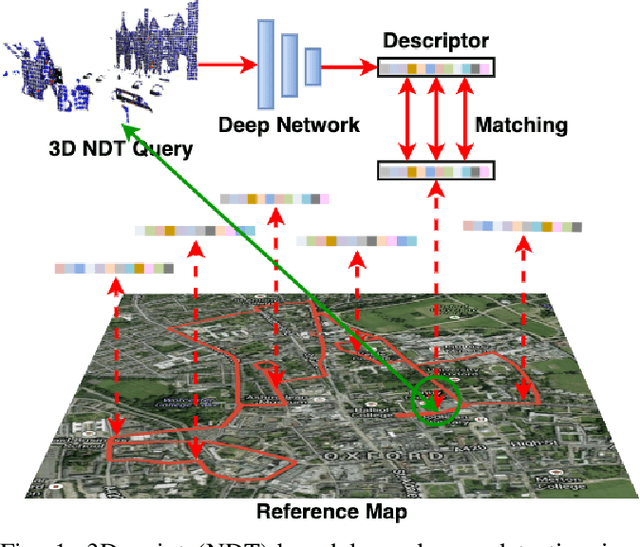
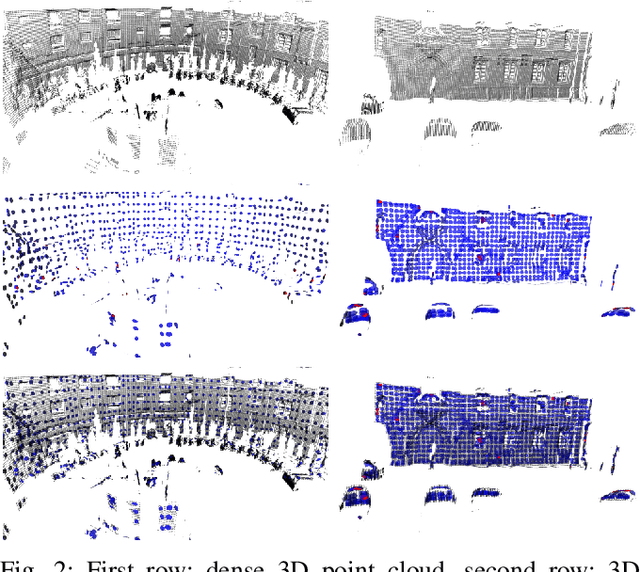
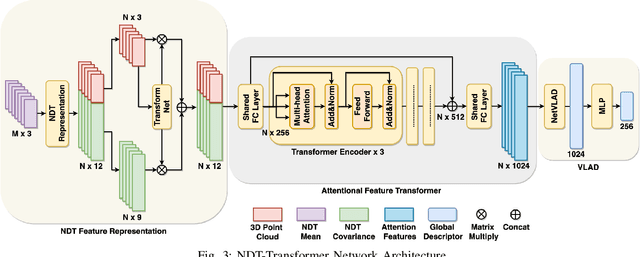
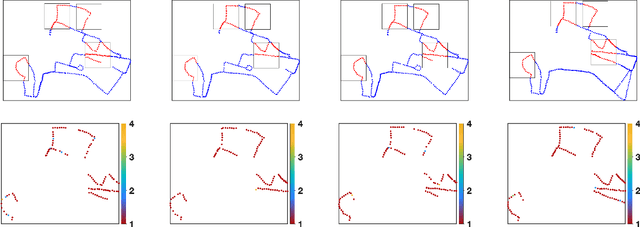
3D point cloud-based place recognition is highly demanded by autonomous driving in GPS-challenged environments and serves as an essential component (i.e. loop-closure detection) in lidar-based SLAM systems. This paper proposes a novel approach, named NDT-Transformer, for realtime and large-scale place recognition using 3D point clouds. Specifically, a 3D Normal Distribution Transform (NDT) representation is employed to condense the raw, dense 3D point cloud as probabilistic distributions (NDT cells) to provide the geometrical shape description. Then a novel NDT-Transformer network learns a global descriptor from a set of 3D NDT cell representations. Benefiting from the NDT representation and NDT-Transformer network, the learned global descriptors are enriched with both geometrical and contextual information. Finally, descriptor retrieval is achieved using a query-database for place recognition. Compared to the state-of-the-art methods, the proposed approach achieves an improvement of 7.52% on average top 1 recall and 2.73% on average top 1% recall on the Oxford Robotcar benchmark.
CATN: Cross-Domain Recommendation for Cold-Start Users via Aspect Transfer Network
May 23, 2020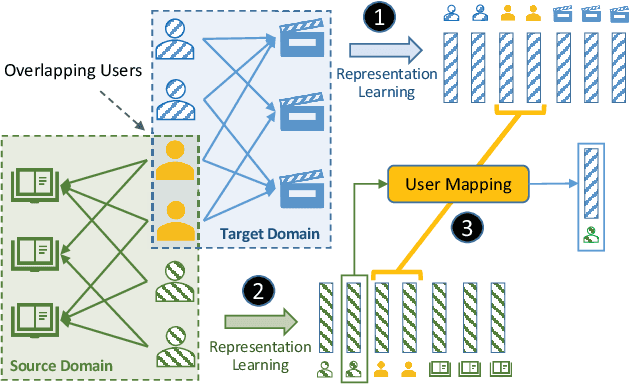
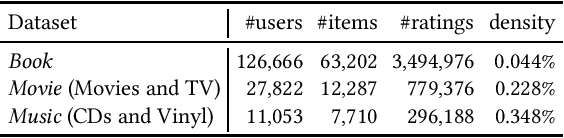
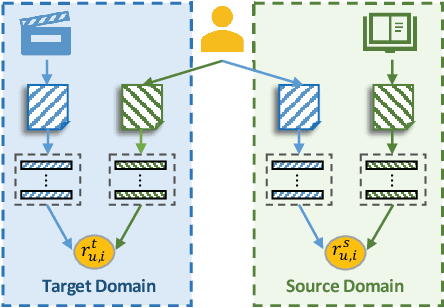
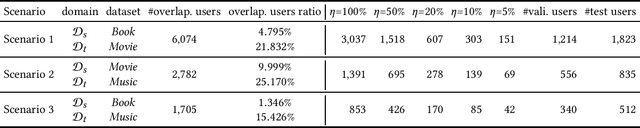
In a large recommender system, the products (or items) could be in many different categories or domains. Given two relevant domains (e.g., Book and Movie), users may have interactions with items in one domain but not in the other domain. To the latter, these users are considered as cold-start users. How to effectively transfer users' preferences based on their interactions from one domain to the other relevant domain, is the key issue in cross-domain recommendation. Inspired by the advances made in review-based recommendation, we propose to model user preference transfer at aspect-level derived from reviews. To this end, we propose a cross-domain recommendation framework via aspect transfer network for cold-start users (named CATN). CATN is devised to extract multiple aspects for each user and each item from their review documents, and learn aspect correlations across domains with an attention mechanism. In addition, we further exploit auxiliary reviews from like-minded users to enhance a user's aspect representations. Then, an end-to-end optimization framework is utilized to strengthen the robustness of our model. On real-world datasets, the proposed CATN outperforms SOTA models significantly in terms of rating prediction accuracy. Further analysis shows that our model is able to reveal user aspect connections across domains at a fine level of granularity, making the recommendation explainable.
Recurrent Kalman Networks: Factorized Inference in High-Dimensional Deep Feature Spaces
May 17, 2019

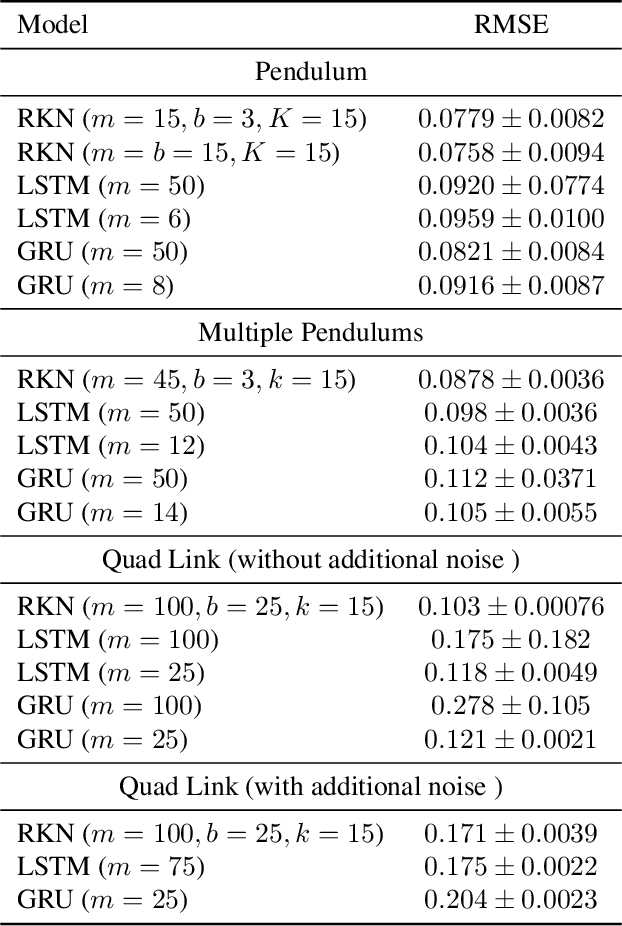
In order to integrate uncertainty estimates into deep time-series modelling, Kalman Filters (KFs) (Kalman et al., 1960) have been integrated with deep learning models, however, such approaches typically rely on approximate inference techniques such as variational inference which makes learning more complex and often less scalable due to approximation errors. We propose a new deep approach to Kalman filtering which can be learned directly in an end-to-end manner using backpropagation without additional approximations. Our approach uses a high-dimensional factorized latent state representation for which the Kalman updates simplify to scalar operations and thus avoids hard to backpropagate, computationally heavy and potentially unstable matrix inversions. Moreover, we use locally linear dynamic models to efficiently propagate the latent state to the next time step. The resulting network architecture, which we call Recurrent Kalman Network (RKN), can be used for any time-series data, similar to a LSTM (Hochreiter & Schmidhuber, 1997) but uses an explicit representation of uncertainty. As shown by our experiments, the RKN obtains much more accurate uncertainty estimates than an LSTM or Gated Recurrent Units (GRUs) (Cho et al., 2014) while also showing a slightly improved prediction performance and outperforms various recent generative models on an image imputation task.
Recurrent-OctoMap: Learning State-based Map Refinement for Long-Term Semantic Mapping with 3D-Lidar Data
Jul 29, 2018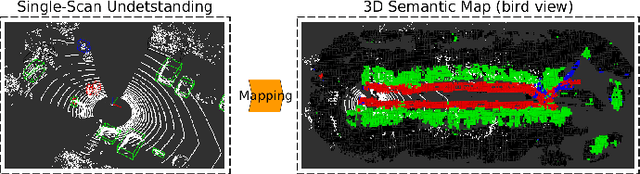
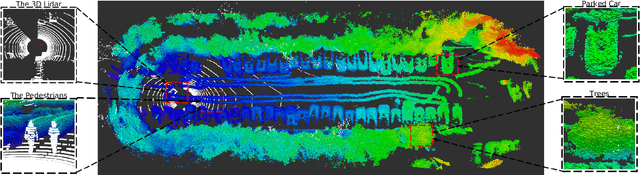
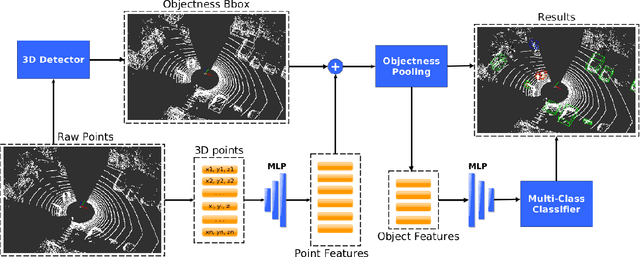
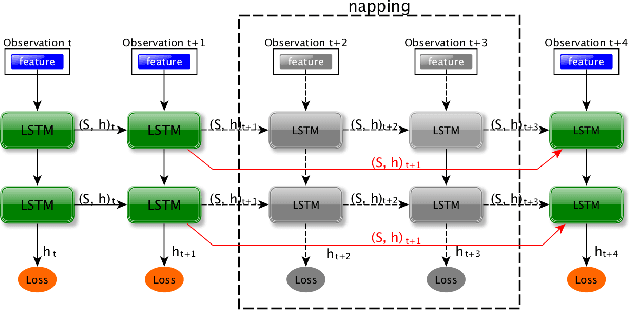
This paper presents a novel semantic mapping approach, Recurrent-OctoMap, learned from long-term 3D Lidar data. Most existing semantic mapping approaches focus on improving semantic understanding of single frames, rather than 3D refinement of semantic maps (i.e. fusing semantic observations). The most widely-used approach for 3D semantic map refinement is a Bayesian update, which fuses the consecutive predictive probabilities following a Markov-Chain model. Instead, we propose a learning approach to fuse the semantic features, rather than simply fusing predictions from a classifier. In our approach, we represent and maintain our 3D map as an OctoMap, and model each cell as a recurrent neural network (RNN), to obtain a Recurrent-OctoMap. In this case, the semantic mapping process can be formulated as a sequence-to-sequence encoding-decoding problem. Moreover, in order to extend the duration of observations in our Recurrent-OctoMap, we developed a robust 3D localization and mapping system for successively mapping a dynamic environment using more than two weeks of data, and the system can be trained and deployed with arbitrary memory length. We validate our approach on the ETH long-term 3D Lidar dataset [1]. The experimental results show that our proposed approach outperforms the conventional "Bayesian update" approach.
Learning monocular visual odometry with dense 3D mapping from dense 3D flow
Jul 25, 2018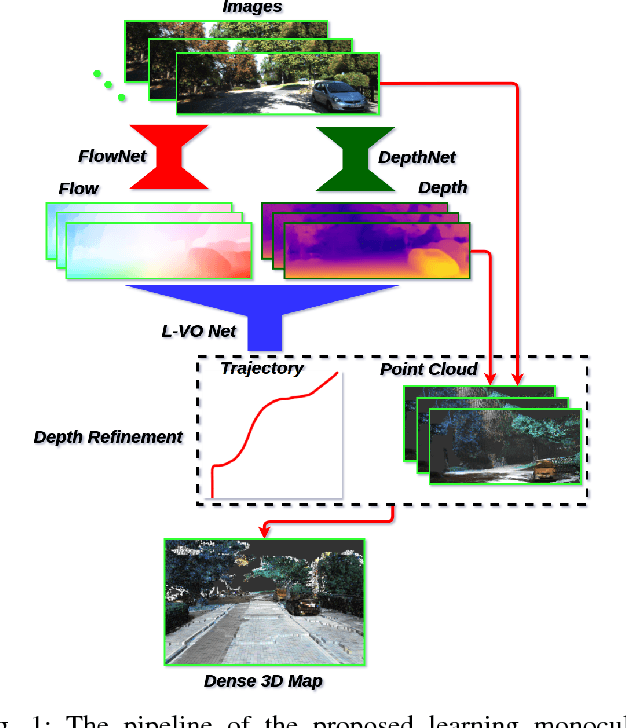
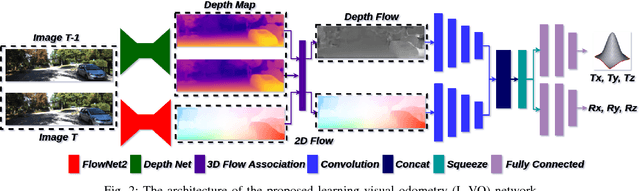
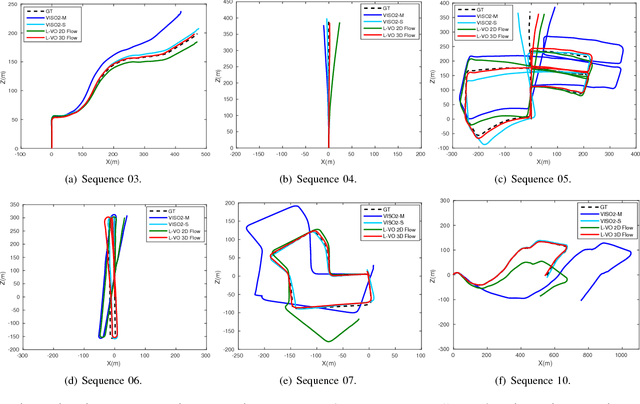
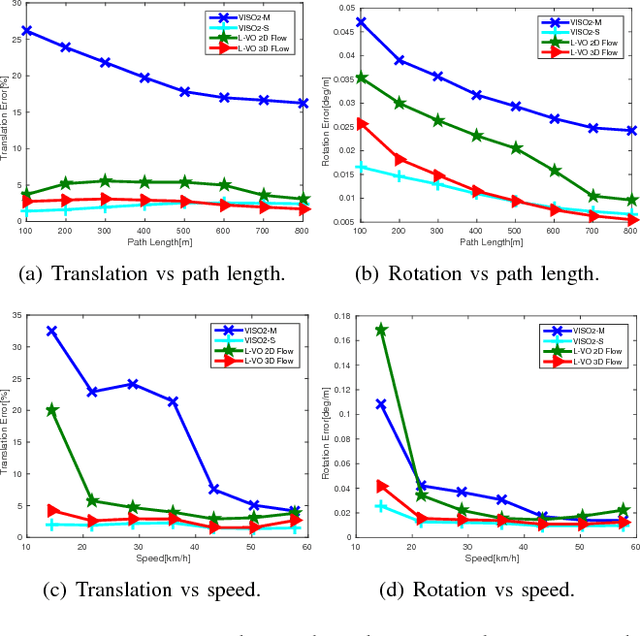
This paper introduces a fully deep learning approach to monocular SLAM, which can perform simultaneous localization using a neural network for learning visual odometry (L-VO) and dense 3D mapping. Dense 2D flow and a depth image are generated from monocular images by sub-networks, which are then used by a 3D flow associated layer in the L-VO network to generate dense 3D flow. Given this 3D flow, the dual-stream L-VO network can then predict the 6DOF relative pose and furthermore reconstruct the vehicle trajectory. In order to learn the correlation between motion directions, the Bivariate Gaussian modelling is employed in the loss function. The L-VO network achieves an overall performance of 2.68% for average translational error and 0.0143 deg/m for average rotational error on the KITTI odometry benchmark. Moreover, the learned depth is fully leveraged to generate a dense 3D map. As a result, an entire visual SLAM system, that is, learning monocular odometry combined with dense 3D mapping, is achieved.
* International Conference on Intelligent Robots and Systems(IROS 2018)