 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChristian Richardt
Real Acoustic Fields: An Audio-Visual Room Acoustics Dataset and Benchmark
Mar 27, 2024
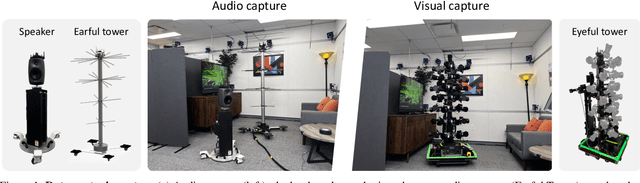

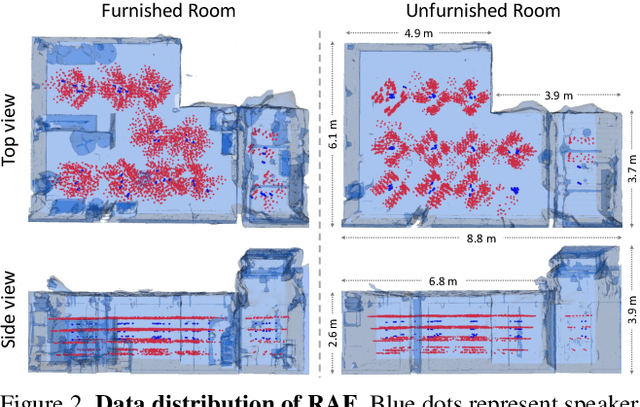
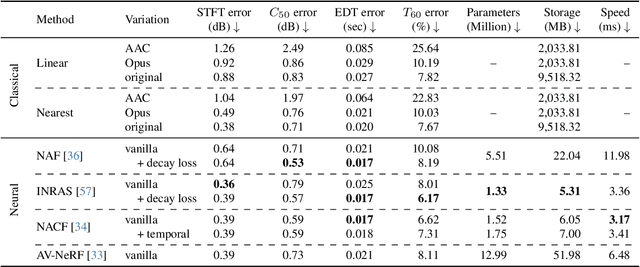
We present a new dataset called Real Acoustic Fields (RAF) that captures real acoustic room data from multiple modalities. The dataset includes high-quality and densely captured room impulse response data paired with multi-view images, and precise 6DoF pose tracking data for sound emitters and listeners in the rooms. We used this dataset to evaluate existing methods for novel-view acoustic synthesis and impulse response generation which previously relied on synthetic data. In our evaluation, we thoroughly assessed existing audio and audio-visual models against multiple criteria and proposed settings to enhance their performance on real-world data. We also conducted experiments to investigate the impact of incorporating visual data (i.e., images and depth) into neural acoustic field models. Additionally, we demonstrated the effectiveness of a simple sim2real approach, where a model is pre-trained with simulated data and fine-tuned with sparse real-world data, resulting in significant improvements in the few-shot learning approach. RAF is the first dataset to provide densely captured room acoustic data, making it an ideal resource for researchers working on audio and audio-visual neural acoustic field modeling techniques. Demos and datasets are available on our project page: https://facebookresearch.github.io/real-acoustic-fields/
ViewDiff: 3D-Consistent Image Generation with Text-to-Image Models
Mar 04, 2024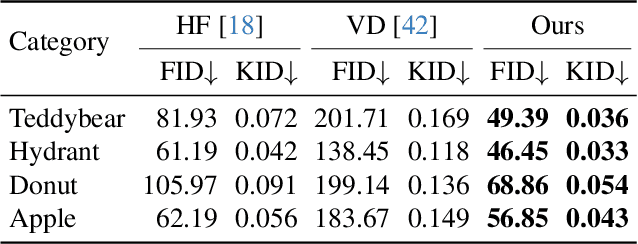
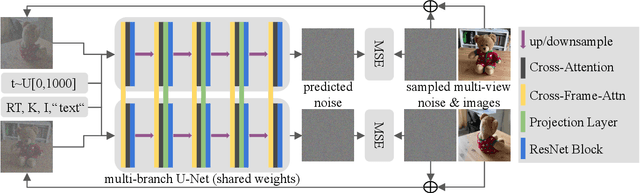

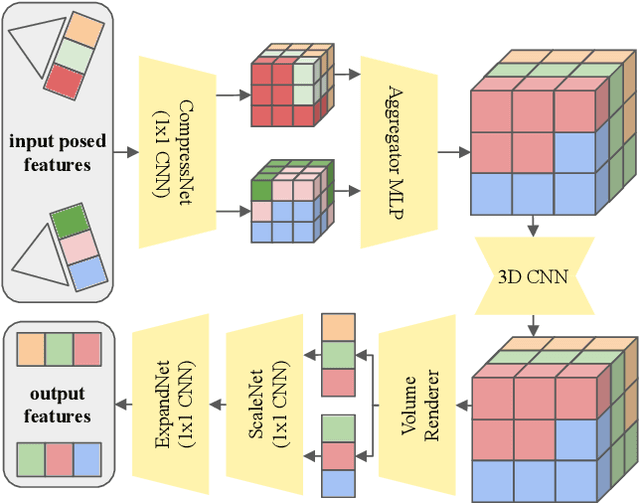
3D asset generation is getting massive amounts of attention, inspired by the recent success of text-guided 2D content creation. Existing text-to-3D methods use pretrained text-to-image diffusion models in an optimization problem or fine-tune them on synthetic data, which often results in non-photorealistic 3D objects without backgrounds. In this paper, we present a method that leverages pretrained text-to-image models as a prior, and learn to generate multi-view images in a single denoising process from real-world data. Concretely, we propose to integrate 3D volume-rendering and cross-frame-attention layers into each block of the existing U-Net network of the text-to-image model. Moreover, we design an autoregressive generation that renders more 3D-consistent images at any viewpoint. We train our model on real-world datasets of objects and showcase its capabilities to generate instances with a variety of high-quality shapes and textures in authentic surroundings. Compared to the existing methods, the results generated by our method are consistent, and have favorable visual quality (-30% FID, -37% KID).
IRIS: Inverse Rendering of Indoor Scenes from Low Dynamic Range Images
Jan 23, 2024While numerous 3D reconstruction and novel-view synthesis methods allow for photorealistic rendering of a scene from multi-view images easily captured with consumer cameras, they bake illumination in their representations and fall short of supporting advanced applications like material editing, relighting, and virtual object insertion. The reconstruction of physically based material properties and lighting via inverse rendering promises to enable such applications. However, most inverse rendering techniques require high dynamic range (HDR) images as input, a setting that is inaccessible to most users. We present a method that recovers the physically based material properties and spatially-varying HDR lighting of a scene from multi-view, low-dynamic-range (LDR) images. We model the LDR image formation process in our inverse rendering pipeline and propose a novel optimization strategy for material, lighting, and a camera response model. We evaluate our approach with synthetic and real scenes compared to the state-of-the-art inverse rendering methods that take either LDR or HDR input. Our method outperforms existing methods taking LDR images as input, and allows for highly realistic relighting and object insertion.
PlatoNeRF: 3D Reconstruction in Plato's Cave via Single-View Two-Bounce Lidar
Dec 21, 20233D reconstruction from a single-view is challenging because of the ambiguity from monocular cues and lack of information about occluded regions. Neural radiance fields (NeRF), while popular for view synthesis and 3D reconstruction, are typically reliant on multi-view images. Existing methods for single-view 3D reconstruction with NeRF rely on either data priors to hallucinate views of occluded regions, which may not be physically accurate, or shadows observed by RGB cameras, which are difficult to detect in ambient light and low albedo backgrounds. We propose using time-of-flight data captured by a single-photon avalanche diode to overcome these limitations. Our method models two-bounce optical paths with NeRF, using lidar transient data for supervision. By leveraging the advantages of both NeRF and two-bounce light measured by lidar, we demonstrate that we can reconstruct visible and occluded geometry without data priors or reliance on controlled ambient lighting or scene albedo. In addition, we demonstrate improved generalization under practical constraints on sensor spatial- and temporal-resolution. We believe our method is a promising direction as single-photon lidars become ubiquitous on consumer devices, such as phones, tablets, and headsets.
SpecNeRF: Gaussian Directional Encoding for Specular Reflections
Dec 20, 2023Neural radiance fields have achieved remarkable performance in modeling the appearance of 3D scenes. However, existing approaches still struggle with the view-dependent appearance of glossy surfaces, especially under complex lighting of indoor environments. Unlike existing methods, which typically assume distant lighting like an environment map, we propose a learnable Gaussian directional encoding to better model the view-dependent effects under near-field lighting conditions. Importantly, our new directional encoding captures the spatially-varying nature of near-field lighting and emulates the behavior of prefiltered environment maps. As a result, it enables the efficient evaluation of preconvolved specular color at any 3D location with varying roughness coefficients. We further introduce a data-driven geometry prior that helps alleviate the shape radiance ambiguity in reflection modeling. We show that our Gaussian directional encoding and geometry prior significantly improve the modeling of challenging specular reflections in neural radiance fields, which helps decompose appearance into more physically meaningful components.
HybridNeRF: Efficient Neural Rendering via Adaptive Volumetric Surfaces
Dec 05, 2023Neural radiance fields provide state-of-the-art view synthesis quality but tend to be slow to render. One reason is that they make use of volume rendering, thus requiring many samples (and model queries) per ray at render time. Although this representation is flexible and easy to optimize, most real-world objects can be modeled more efficiently with surfaces instead of volumes, requiring far fewer samples per ray. This observation has spurred considerable progress in surface representations such as signed distance functions, but these may struggle to model semi-opaque and thin structures. We propose a method, HybridNeRF, that leverages the strengths of both representations by rendering most objects as surfaces while modeling the (typically) small fraction of challenging regions volumetrically. We evaluate HybridNeRF against the challenging Eyeful Tower dataset along with other commonly used view synthesis datasets. When comparing to state-of-the-art baselines, including recent rasterization-based approaches, we improve error rates by 15-30% while achieving real-time framerates (at least 36 FPS) for virtual-reality resolutions (2Kx2K).
PyNeRF: Pyramidal Neural Radiance Fields
Nov 30, 2023Neural Radiance Fields (NeRFs) can be dramatically accelerated by spatial grid representations. However, they do not explicitly reason about scale and so introduce aliasing artifacts when reconstructing scenes captured at different camera distances. Mip-NeRF and its extensions propose scale-aware renderers that project volumetric frustums rather than point samples but such approaches rely on positional encodings that are not readily compatible with grid methods. We propose a simple modification to grid-based models by training model heads at different spatial grid resolutions. At render time, we simply use coarser grids to render samples that cover larger volumes. Our method can be easily applied to existing accelerated NeRF methods and significantly improves rendering quality (reducing error rates by 20-90% across synthetic and unbounded real-world scenes) while incurring minimal performance overhead (as each model head is quick to evaluate). Compared to Mip-NeRF, we reduce error rates by 20% while training over 60x faster.
VR-NeRF: High-Fidelity Virtualized Walkable Spaces
Nov 05, 2023We present an end-to-end system for the high-fidelity capture, model reconstruction, and real-time rendering of walkable spaces in virtual reality using neural radiance fields. To this end, we designed and built a custom multi-camera rig to densely capture walkable spaces in high fidelity and with multi-view high dynamic range images in unprecedented quality and density. We extend instant neural graphics primitives with a novel perceptual color space for learning accurate HDR appearance, and an efficient mip-mapping mechanism for level-of-detail rendering with anti-aliasing, while carefully optimizing the trade-off between quality and speed. Our multi-GPU renderer enables high-fidelity volume rendering of our neural radiance field model at the full VR resolution of dual 2K$\times$2K at 36 Hz on our custom demo machine. We demonstrate the quality of our results on our challenging high-fidelity datasets, and compare our method and datasets to existing baselines. We release our dataset on our project website.
Learning Neural Duplex Radiance Fields for Real-Time View Synthesis
Apr 20, 2023
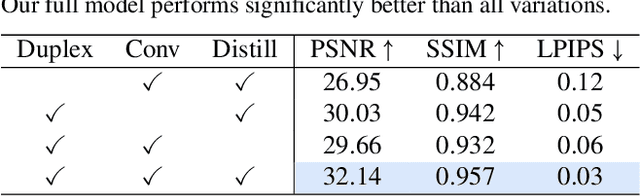
Neural radiance fields (NeRFs) enable novel view synthesis with unprecedented visual quality. However, to render photorealistic images, NeRFs require hundreds of deep multilayer perceptron (MLP) evaluations - for each pixel. This is prohibitively expensive and makes real-time rendering infeasible, even on powerful modern GPUs. In this paper, we propose a novel approach to distill and bake NeRFs into highly efficient mesh-based neural representations that are fully compatible with the massively parallel graphics rendering pipeline. We represent scenes as neural radiance features encoded on a two-layer duplex mesh, which effectively overcomes the inherent inaccuracies in 3D surface reconstruction by learning the aggregated radiance information from a reliable interval of ray-surface intersections. To exploit local geometric relationships of nearby pixels, we leverage screen-space convolutions instead of the MLPs used in NeRFs to achieve high-quality appearance. Finally, the performance of the whole framework is further boosted by a novel multi-view distillation optimization strategy. We demonstrate the effectiveness and superiority of our approach via extensive experiments on a range of standard datasets.
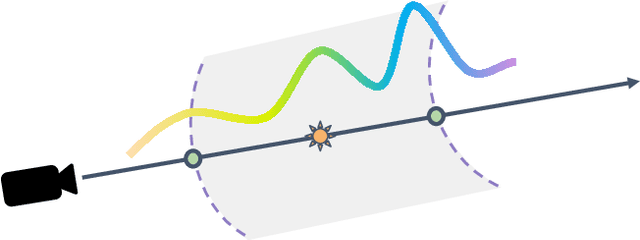
HyperReel: High-Fidelity 6-DoF Video with Ray-Conditioned Sampling
Jan 05, 2023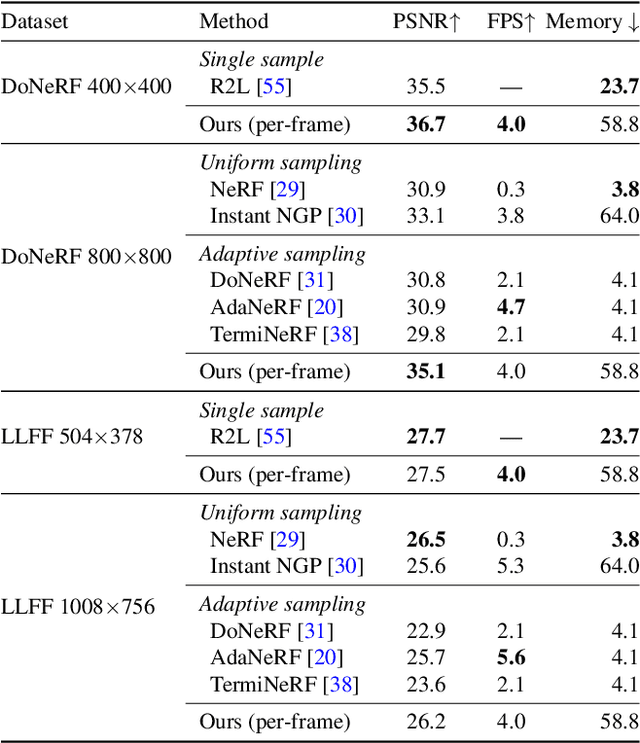
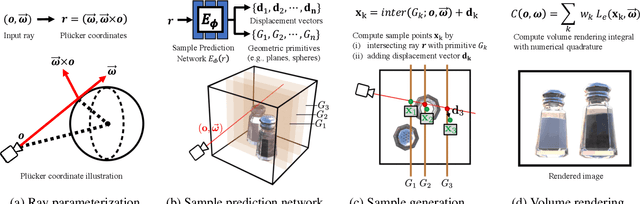
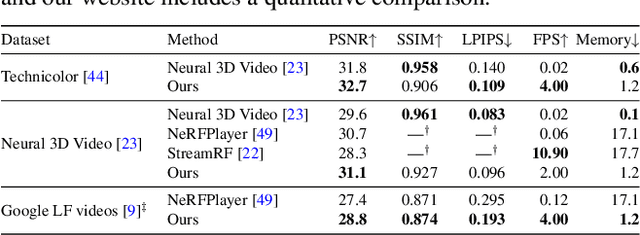
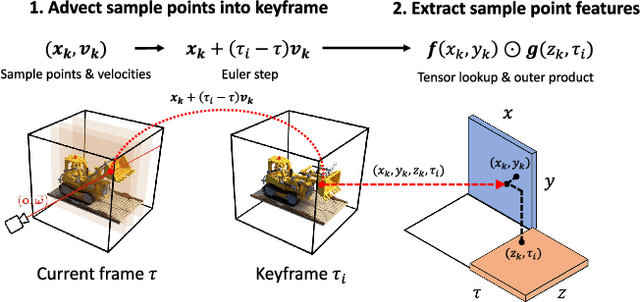
Volumetric scene representations enable photorealistic view synthesis for static scenes and form the basis of several existing 6-DoF video techniques. However, the volume rendering procedures that drive these representations necessitate careful trade-offs in terms of quality, rendering speed, and memory efficiency. In particular, existing methods fail to simultaneously achieve real-time performance, small memory footprint, and high-quality rendering for challenging real-world scenes. To address these issues, we present HyperReel -- a novel 6-DoF video representation. The two core components of HyperReel are: (1) a ray-conditioned sample prediction network that enables high-fidelity, high frame rate rendering at high resolutions and (2) a compact and memory efficient dynamic volume representation. Our 6-DoF video pipeline achieves the best performance compared to prior and contemporary approaches in terms of visual quality with small memory requirements, while also rendering at up to 18 frames-per-second at megapixel resolution without any custom CUDA code.