 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFanyi Wang
PoseAnimate: Zero-shot high fidelity pose controllable character animation
Apr 30, 2024
Image-to-video(I2V) generation aims to create a video sequence from a single image, which requires high temporal coherence and visual fidelity with the source image.However, existing approaches suffer from character appearance inconsistency and poor preservation of fine details. Moreover, they require a large amount of video data for training, which can be computationally demanding.To address these limitations,we propose PoseAnimate, a novel zero-shot I2V framework for character animation.PoseAnimate contains three key components: 1) Pose-Aware Control Module (PACM) incorporates diverse pose signals into conditional embeddings, to preserve character-independent content and maintain precise alignment of actions.2) Dual Consistency Attention Module (DCAM) enhances temporal consistency, and retains character identity and intricate background details.3) Mask-Guided Decoupling Module (MGDM) refines distinct feature perception, improving animation fidelity by decoupling the character and background.We also propose a Pose Alignment Transition Algorithm (PATA) to ensure smooth action transition.Extensive experiment results demonstrate that our approach outperforms the state-of-the-art training-based methods in terms of character consistency and detail fidelity. Moreover, it maintains a high level of temporal coherence throughout the generated animations.
LoopAnimate: Loopable Salient Object Animation
Apr 14, 2024Research on diffusion model-based video generation has advanced rapidly. However, limitations in object fidelity and generation length hinder its practical applications. Additionally, specific domains like animated wallpapers require seamless looping, where the first and last frames of the video match seamlessly. To address these challenges, this paper proposes LoopAnimate, a novel method for generating videos with consistent start and end frames. To enhance object fidelity, we introduce a framework that decouples multi-level image appearance and textual semantic information. Building upon an image-to-image diffusion model, our approach incorporates both pixel-level and feature-level information from the input image, injecting image appearance and textual semantic embeddings at different positions of the diffusion model. Existing UNet-based video generation models require to input the entire videos during training to encode temporal and positional information at once. However, due to limitations in GPU memory, the number of frames is typically restricted to 16. To address this, this paper proposes a three-stage training strategy with progressively increasing frame numbers and reducing fine-tuning modules. Additionally, we introduce the Temporal E nhanced Motion Module(TEMM) to extend the capacity for encoding temporal and positional information up to 36 frames. The proposed LoopAnimate, which for the first time extends the single-pass generation length of UNet-based video generation models to 35 frames while maintaining high-quality video generation. Experiments demonstrate that LoopAnimate achieves state-of-the-art performance in both objective metrics, such as fidelity and temporal consistency, and subjective evaluation results.
ADMap: Anti-disturbance framework for reconstructing online vectorized HD map
Jan 24, 2024In the field of autonomous driving, online high-definition (HD) map reconstruction is crucial for planning tasks. Recent research has developed several high-performance HD map reconstruction models to meet this necessity. However, the point sequences within the instance vectors may be jittery or jagged due to prediction bias, which can impact subsequent tasks. Therefore, this paper proposes the Anti-disturbance Map reconstruction framework (ADMap). To mitigate point-order jitter, the framework consists of three modules: Multi-Scale Perception Neck, Instance Interactive Attention (IIA), and Vector Direction Difference Loss (VDDL). By exploring the point-order relationships between and within instances in a cascading manner, the model can monitor the point-order prediction process more effectively. ADMap achieves state-of-the-art performance on the nuScenes and Argoverse2 datasets. Extensive results demonstrate its ability to produce stable and reliable map elements in complex and changing driving scenarios. Code and more demos are available at https://github.com/hht1996ok/ADMap.
Lightweight high-resolution Subject Matting in the Real World
Dec 12, 2023Existing saliency object detection (SOD) methods struggle to satisfy fast inference and accurate results simultaneously in high resolution scenes. They are limited by the quality of public datasets and efficient network modules for high-resolution images. To alleviate these issues, we propose to construct a saliency object matting dataset HRSOM and a lightweight network PSUNet. Considering efficient inference of mobile depolyment framework, we design a symmetric pixel shuffle module and a lightweight module TRSU. Compared to 13 SOD methods, the proposed PSUNet has the best objective performance on the high-resolution benchmark dataset. Evaluation results of objective assessment are superior compared to U$^2$Net that has 10 times of parameter amount of our network. On Snapdragon 8 Gen 2 Mobile Platform, inference a single 640$\times$640 image only takes 113ms. And on the subjective assessment, evaluation results are better than the industry benchmark IOS16 (Lift subject from background).
BARET : Balanced Attention based Real image Editing driven by Target-text Inversion
Dec 09, 2023Image editing approaches with diffusion models have been rapidly developed, yet their applicability are subject to requirements such as specific editing types (e.g., foreground or background object editing, style transfer), multiple conditions (e.g., mask, sketch, caption), and time consuming fine-tuning of diffusion models. For alleviating these limitations and realizing efficient real image editing, we propose a novel editing technique that only requires an input image and target text for various editing types including non-rigid edits without fine-tuning diffusion model. Our method contains three novelties:(I) Target-text Inversion Schedule (TTIS) is designed to fine-tune the input target text embedding to achieve fast image reconstruction without image caption and acceleration of convergence.(II) Progressive Transition Scheme applies progressive linear interpolation between target text embedding and its fine-tuned version to generate transition embedding for maintaining non-rigid editing capability.(III) Balanced Attention Module (BAM) balances the tradeoff between textual description and image semantics.By the means of combining self-attention map from reconstruction process and cross-attention map from transition process, the guidance of target text embeddings in diffusion process is optimized.In order to demonstrate editing capability, effectiveness and efficiency of the proposed BARET, we have conducted extensive qualitative and quantitative experiments. Moreover, results derived from user study and ablation study further prove the superiority over other methods.
A Machine Vision Method for Correction of Eccentric Error: Based on Adaptive Enhancement Algorithm
Sep 01, 2023
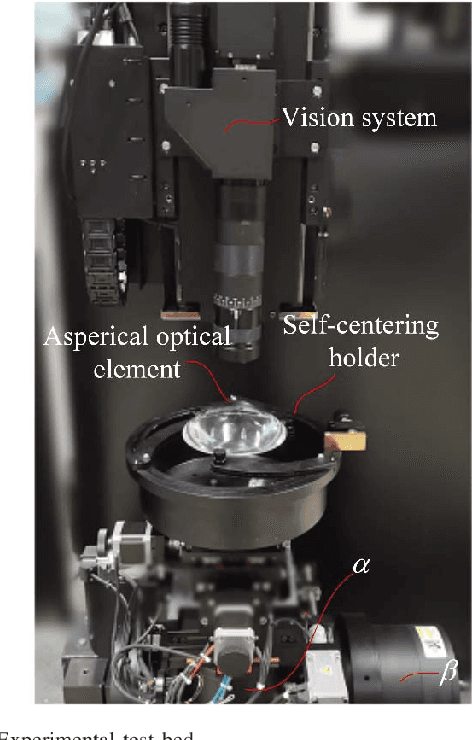
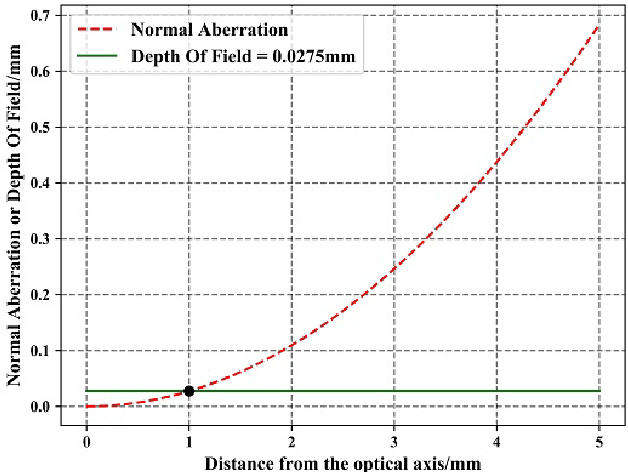
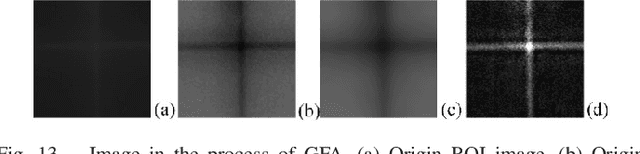
In the procedure of surface defects detection for large-aperture aspherical optical elements, it is of vital significance to adjust the optical axis of the element to be coaxial with the mechanical spin axis accurately. Therefore, a machine vision method for eccentric error correction is proposed in this paper. Focusing on the severe defocus blur of reference crosshair image caused by the imaging characteristic of the aspherical optical element, which may lead to the failure of correction, an Adaptive Enhancement Algorithm (AEA) is proposed to strengthen the crosshair image. AEA is consisted of existed Guided Filter Dark Channel Dehazing Algorithm (GFA) and proposed lightweight Multi-scale Densely Connected Network (MDC-Net). The enhancement effect of GFA is excellent but time-consuming, and the enhancement effect of MDC-Net is slightly inferior but strongly real-time. As AEA will be executed dozens of times during each correction procedure, its real-time performance is very important. Therefore, by setting the empirical threshold of definition evaluation function SMD2, GFA and MDC-Net are respectively applied to highly and slightly blurred crosshair images so as to ensure the enhancement effect while saving as much time as possible. AEA has certain robustness in time-consuming performance, which takes an average time of 0.2721s and 0.0963s to execute GFA and MDC-Net separately on ten 200pixels 200pixels Region of Interest (ROI) images with different degrees of blur. And the eccentricity error can be reduced to within 10um by our method.
All-pairs Consistency Learning for Weakly Supervised Semantic Segmentation
Aug 08, 2023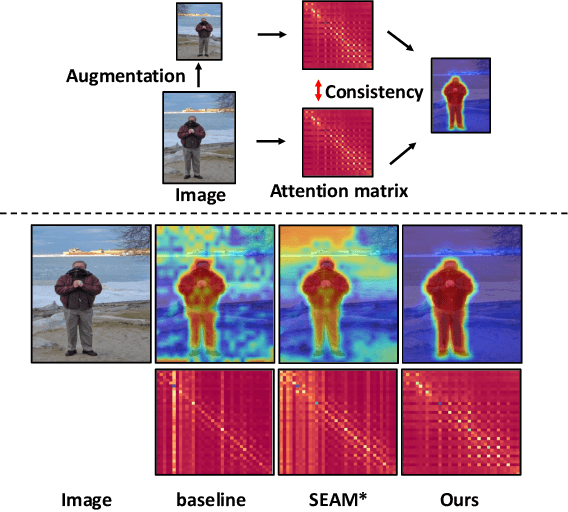
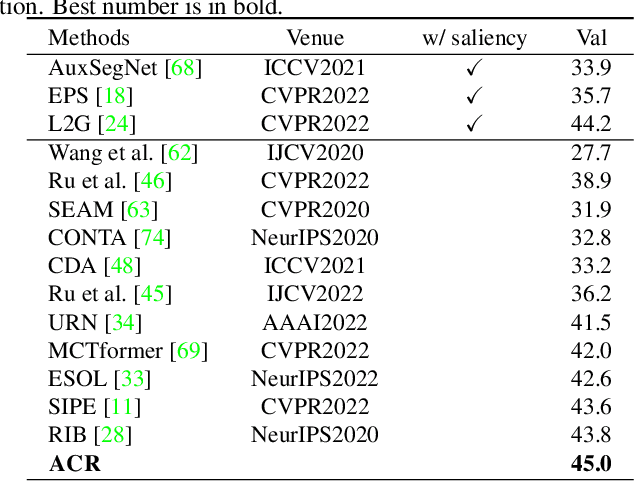
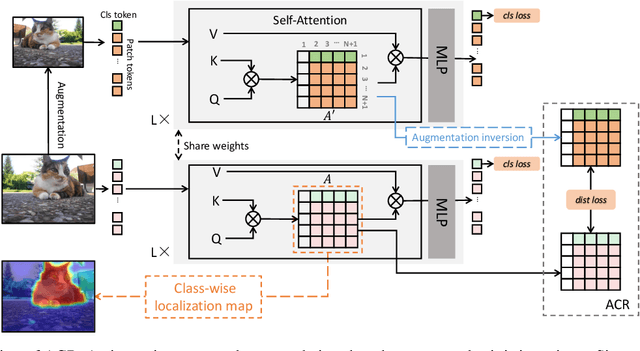
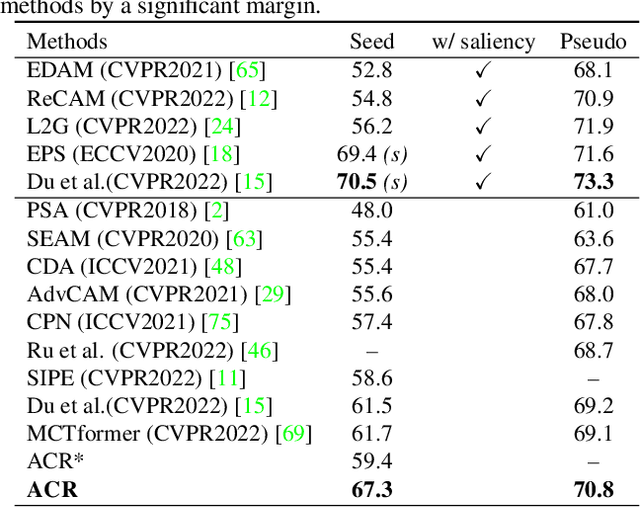
In this work, we propose a new transformer-based regularization to better localize objects for Weakly supervised semantic segmentation (WSSS). In image-level WSSS, Class Activation Map (CAM) is adopted to generate object localization as pseudo segmentation labels. To address the partial activation issue of the CAMs, consistency regularization is employed to maintain activation intensity invariance across various image augmentations. However, such methods ignore pair-wise relations among regions within each CAM, which capture context and should also be invariant across image views. To this end, we propose a new all-pairs consistency regularization (ACR). Given a pair of augmented views, our approach regularizes the activation intensities between a pair of augmented views, while also ensuring that the affinity across regions within each view remains consistent. We adopt vision transformers as the self-attention mechanism naturally embeds pair-wise affinity. This enables us to simply regularize the distance between the attention matrices of augmented image pairs. Additionally, we introduce a novel class-wise localization method that leverages the gradients of the class token. Our method can be seamlessly integrated into existing WSSS methods using transformers without modifying the architectures. We evaluate our method on PASCAL VOC and MS COCO datasets. Our method produces noticeably better class localization maps (67.3% mIoU on PASCAL VOC train), resulting in superior WSSS performances.
EA-BEV: Edge-aware Bird' s-Eye-View Projector for 3D Object Detection
Apr 18, 2023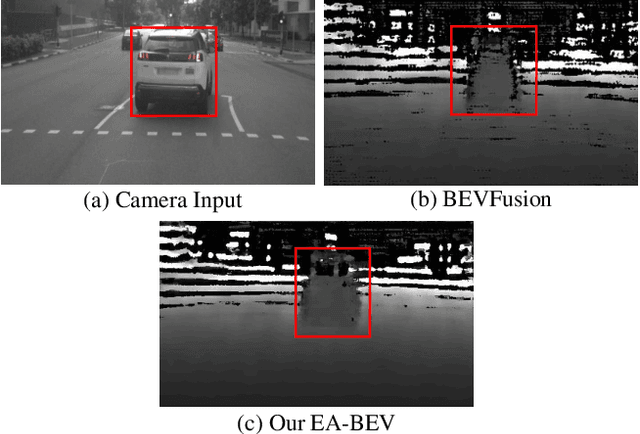
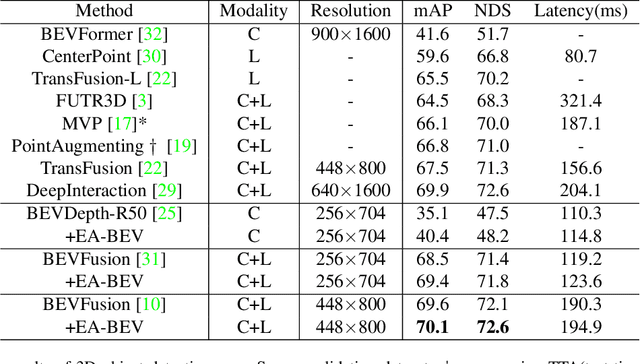
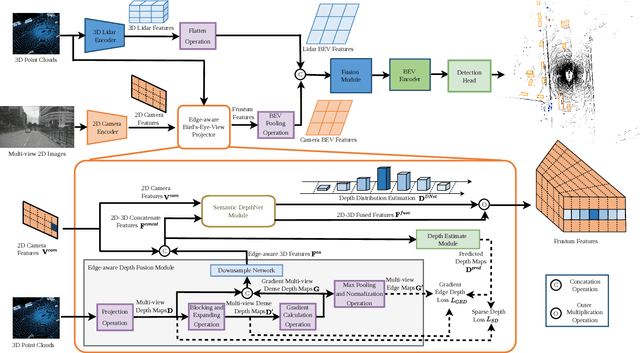

In recent years, great progress has been made in the Lift-Splat-Shot-based (LSS-based) 3D object detection method, which converts features of 2D camera view and 3D lidar view to Bird's-Eye-View (BEV) for feature fusion. However, inaccurate depth estimation (e.g. the 'depth jump' problem) is an obstacle to develop LSS-based methods. To alleviate the 'depth jump' problem, we proposed Edge-Aware Bird's-Eye-View (EA-BEV) projector. By coupling proposed edge-aware depth fusion module and depth estimate module, the proposed EA-BEV projector solves the problem and enforces refined supervision on depth. Besides, we propose sparse depth supervision and gradient edge depth supervision, for constraining learning on global depth and local marginal depth information. Our EA-BEV projector is a plug-and-play module for any LSS-based 3D object detection models, and effectively improves the baseline performance. We demonstrate the effectiveness on the nuScenes benchmark. On the nuScenes 3D object detection validation dataset, our proposed EA-BEV projector can boost several state-of-the-art LLS-based baselines on nuScenes 3D object detection benchmark and nuScenes BEV map segmentation benchmark with negligible increment of inference time.
GAM : Gradient Attention Module of Optimization for Point Clouds Analysis
Mar 21, 2023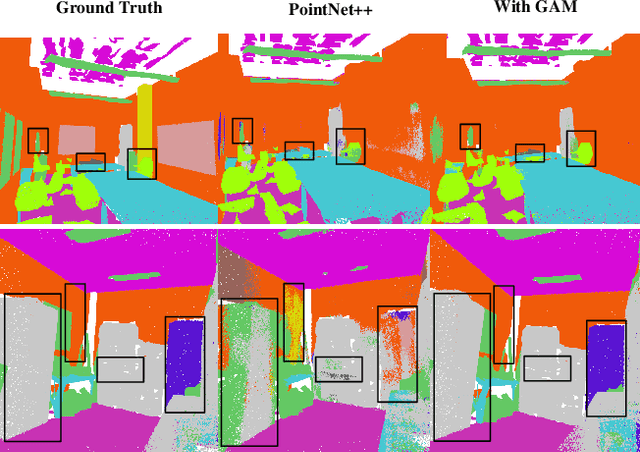
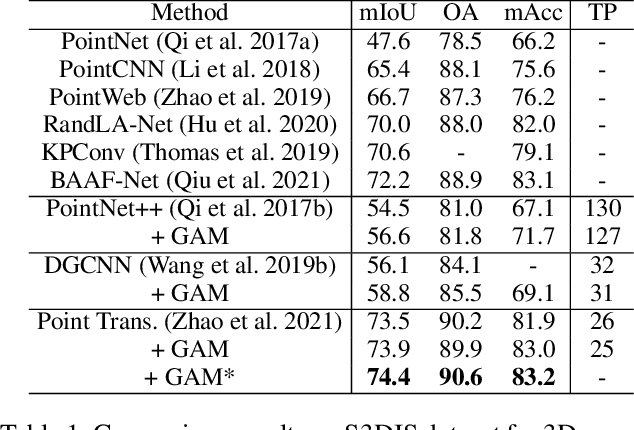

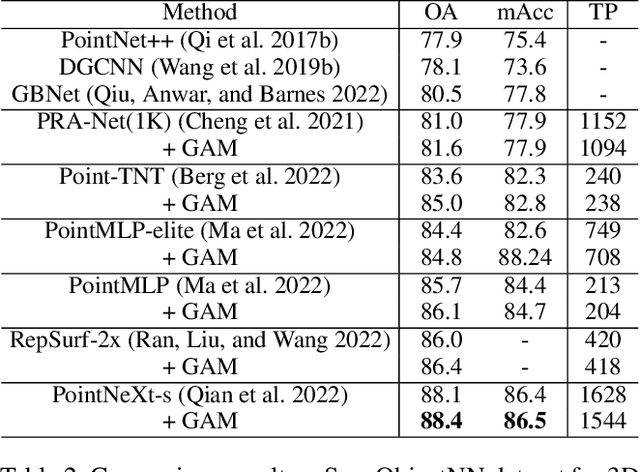
In point cloud analysis tasks, the existing local feature aggregation descriptors (LFAD) are unable to fully utilize information in the neighborhood of central points. Previous methods rely solely on Euclidean distance to constrain the local aggregation process, which can be easily affected by abnormal points and cannot adequately fit with the original geometry of the point cloud. We believe that fine-grained geometric information (FGGI) is significant for the aggregation of local features. Therefore, we propose a gradient-based local attention module, termed as Gradient Attention Module (GAM), to address the aforementioned problem. Our proposed GAM simplifies the process that extracts gradient information in the neighborhood and uses the Zenith Angle matrix and Azimuth Angle matrix as explicit representation, which accelerates the module by 35X. Comprehensive experiments were conducted on five benchmark datasets to demonstrate the effectiveness and generalization capability of the proposed GAM for 3D point cloud analysis. Especially on S3DIS dataset, GAM achieves the best performance among current point-based models with mIoU/OA/mAcc of 74.4%/90.6%/83.2%, respectively.
* In AAAI, 2023
VA-GCN: A Vector Attention Graph Convolution Network for learning on Point Clouds
Jun 01, 2021
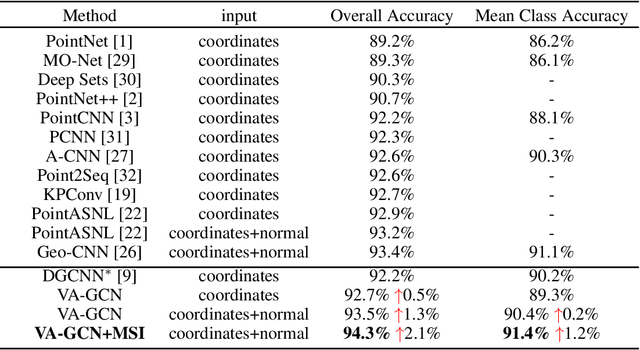

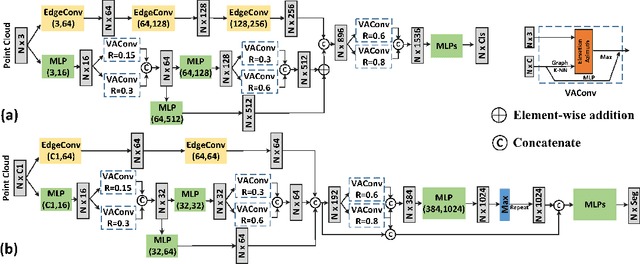
Owing to the development of research on local aggregation operators, dramatic breakthrough has been made in point cloud analysis models. However, existing local aggregation operators in the current literature fail to attach decent importance to the local information of the point cloud, which limits the power of the models. To fit this gap, we propose an efficient Vector Attention Convolution module (VAConv), which utilizes K-Nearest Neighbor (KNN) to extract the neighbor points of each input point, and then uses the elevation and azimuth relationship of the vectors between the center point and its neighbors to construct an attention weight matrix for edge features. Afterwards, the VAConv adopts a dual-channel structure to fuse weighted edge features and global features. To verify the efficiency of the VAConv, we connect the VAConvs with different receptive fields in parallel to obtain a Multi-scale graph convolutional network, VA-GCN. The proposed VA-GCN achieves state-of-the-art performance on standard benchmarks including ModelNet40, S3DIS and ShapeNet. Remarkably, on the ModelNet40 dataset for 3D classification, VA-GCN increased by 2.4% compared to the baseline.