 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHai Chen
Understanding the Robustness of 3D Object Detection with Bird's-Eye-View Representations in Autonomous Driving
Mar 30, 2023
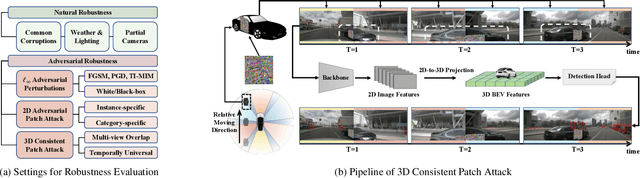
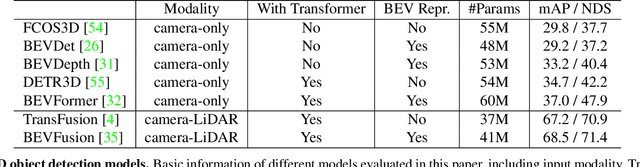

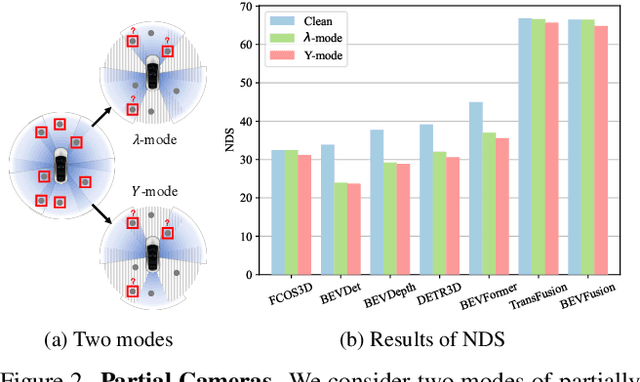
3D object detection is an essential perception task in autonomous driving to understand the environments. The Bird's-Eye-View (BEV) representations have significantly improved the performance of 3D detectors with camera inputs on popular benchmarks. However, there still lacks a systematic understanding of the robustness of these vision-dependent BEV models, which is closely related to the safety of autonomous driving systems. In this paper, we evaluate the natural and adversarial robustness of various representative models under extensive settings, to fully understand their behaviors influenced by explicit BEV features compared with those without BEV. In addition to the classic settings, we propose a 3D consistent patch attack by applying adversarial patches in the 3D space to guarantee the spatiotemporal consistency, which is more realistic for the scenario of autonomous driving. With substantial experiments, we draw several findings: 1) BEV models tend to be more stable than previous methods under different natural conditions and common corruptions due to the expressive spatial representations; 2) BEV models are more vulnerable to adversarial noises, mainly caused by the redundant BEV features; 3) Camera-LiDAR fusion models have superior performance under different settings with multi-modal inputs, but BEV fusion model is still vulnerable to adversarial noises of both point cloud and image. These findings alert the safety issue in the applications of BEV detectors and could facilitate the development of more robust models.
Classification of lung nodules in CT images based on Wasserstein distance in differential geometry
Jun 30, 2018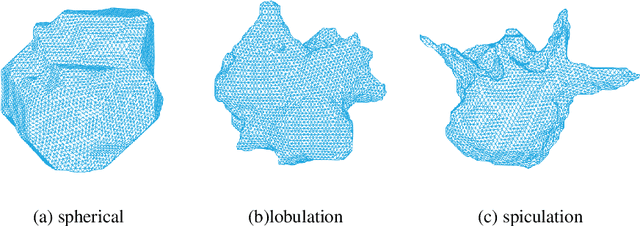
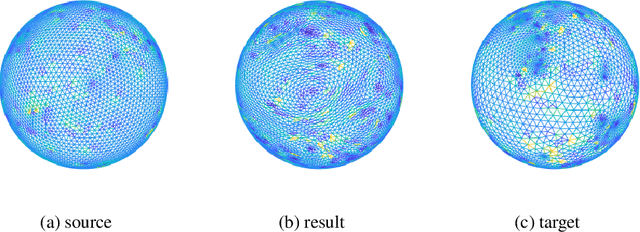
Lung nodules are commonly detected in screening for patients with a risk for lung cancer. Though the status of large nodules can be easily diagnosed by fine needle biopsy or bronchoscopy, small nodules are often difficult to classify on computed tomography (CT). Recent works have shown that shape analysis of lung nodules can be used to differentiate benign lesions from malignant ones, though existing methods are limited in their sensitivity and specificity. In this work we introduced a new 3D shape analysis within the framework of differential geometry to calculate the Wasserstein distance between benign and malignant lung nodules to derive an accurate classification scheme. The Wasserstein distance between the nodules is calculated based on our new spherical optimal mass transport, this new algorithm works directly on sphere by using spherical metric, which is much more accurate and efficient than previous methods. In the process of deformation, the area-distortion factor gives a probability measure on the unit sphere, which forms the Wasserstein space. From known cases of benign and malignant lung nodules, we can calculate a unique optimal mass transport map between their correspondingly deformed Wasserstein spaces. This transportation cost defines the Wasserstein distance between them and can be used to classify new lung nodules into either the benign or malignant class. To the best of our knowledge, this is the first work that utilizes Wasserstein distance for lung nodule classification. The advantages of Wasserstein distance are it is invariant under rigid motions and scalings, thus it intrinsically measures shape distance even when the underlying shapes are of high complexity, making it well suited to classify lung nodules as they have different sizes, orientations, and appearances.