 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIury V. Bessa
Incremental Bounded Model Checking of Artificial Neural Networks in CUDA
Jul 30, 2019
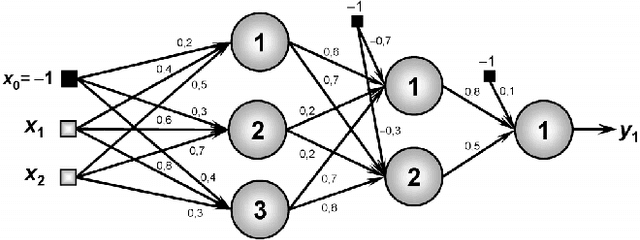

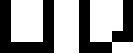
Artificial Neural networks (ANNs) are powerful computing systems employed for various applications due to their versatility to generalize and to respond to unexpected inputs/patterns. However, implementations of ANNs for safety-critical systems might lead to failures, which are hardly predicted in the design phase since ANNs are highly parallel and their parameters are hardly interpretable. Here we develop and evaluate a novel symbolic software verification framework based on incremental bounded model checking (BMC) to check for adversarial cases and coverage methods in multi-layer perceptron (MLP). In particular, we further develop the efficient SMT-based Context-Bounded Model Checker for Graphical Processing Units (ESBMC-GPU) in order to ensure the reliability of certain safety properties in which safety-critical systems can fail and make incorrect decisions, thereby leading to unwanted material damage or even put lives in danger. This paper marks the first symbolic verification framework to reason over ANNs implemented in CUDA. Our experimental results show that our approach implemented in ESBMC-GPU can successfully verify safety properties and covering methods in ANNs and correctly generate 28 adversarial cases in MLPs.
Counterexample Guided Inductive Optimization Applied to Mobile Robots Path Planning (Extended Version)
Aug 14, 2017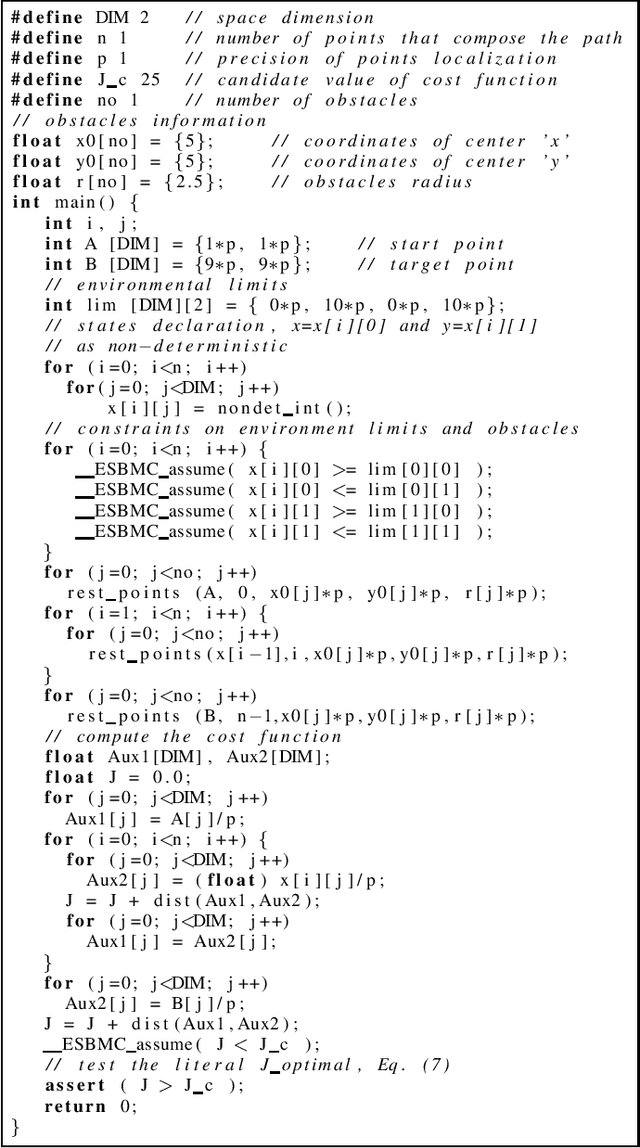
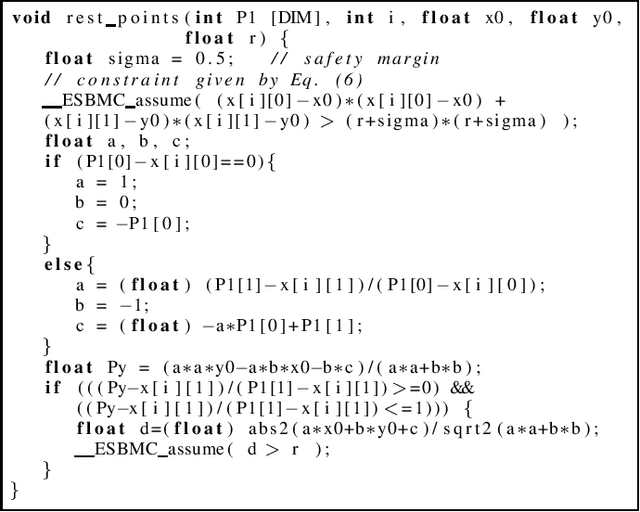
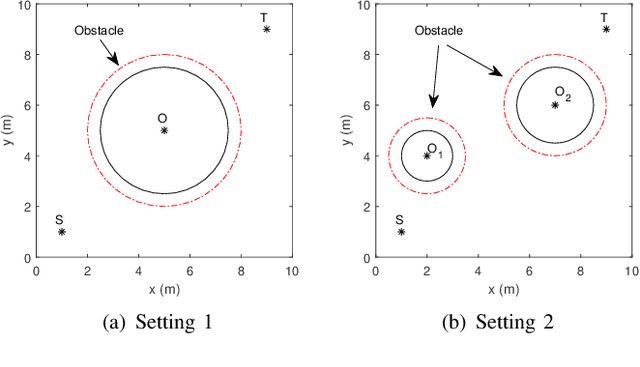
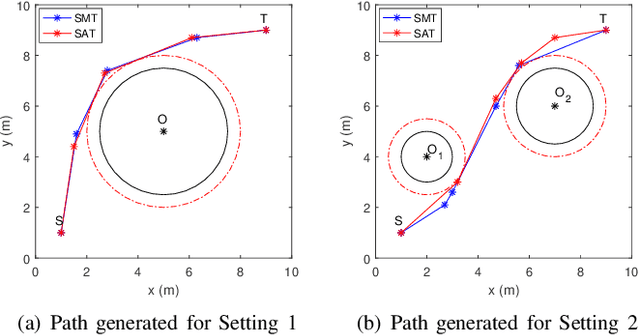
We describe and evaluate a novel optimization-based off-line path planning algorithm for mobile robots based on the Counterexample-Guided Inductive Optimization (CEGIO) technique. CEGIO iteratively employs counterexamples generated from Boolean Satisfiability (SAT) and Satisfiability Modulo Theories (SMT) solvers, in order to guide the optimization process and to ensure global optimization. This paper marks the first application of CEGIO for planning mobile robot path. In particular, CEGIO has been successfully applied to obtain optimal two-dimensional paths for autonomous mobile robots using off-the-shelf SAT and SMT solvers.