 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJun Hou
SceneX:Procedural Controllable Large-scale Scene Generation via Large-language Models
Mar 23, 2024
Due to its great application potential, large-scale scene generation has drawn extensive attention in academia and industry. Recent research employs powerful generative models to create desired scenes and achieves promising results. However, most of these methods represent the scene using 3D primitives (e.g. point cloud or radiance field) incompatible with the industrial pipeline, which leads to a substantial gap between academic research and industrial deployment. Procedural Controllable Generation (PCG) is an efficient technique for creating scalable and high-quality assets, but it is unfriendly for ordinary users as it demands profound domain expertise. To address these issues, we resort to using the large language model (LLM) to drive the procedural modeling. In this paper, we introduce a large-scale scene generation framework, SceneX, which can automatically produce high-quality procedural models according to designers' textual descriptions.Specifically, the proposed method comprises two components, PCGBench and PCGPlanner. The former encompasses an extensive collection of accessible procedural assets and thousands of hand-craft API documents. The latter aims to generate executable actions for Blender to produce controllable and precise 3D assets guided by the user's instructions. Our SceneX can generate a city spanning 2.5 km times 2.5 km with delicate layout and geometric structures, drastically reducing the time cost from several weeks for professional PCG engineers to just a few hours for an ordinary user. Extensive experiments demonstrated the capability of our method in controllable large-scale scene generation and editing, including asset placement and season translation.
DiPrompT: Disentangled Prompt Tuning for Multiple Latent Domain Generalization in Federated Learning
Mar 11, 2024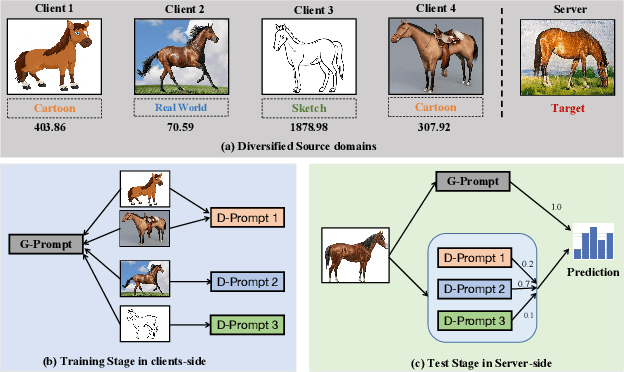
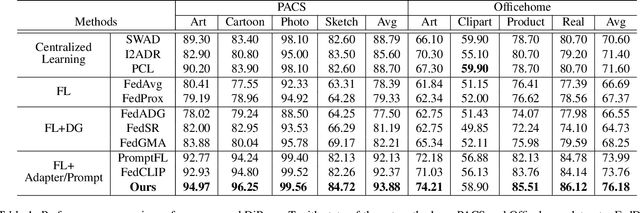
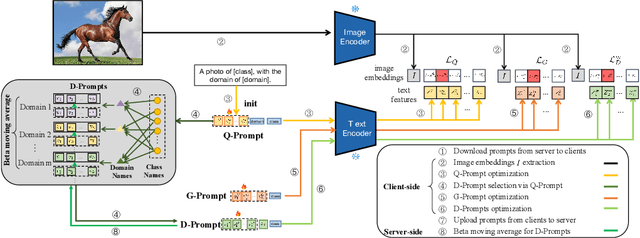
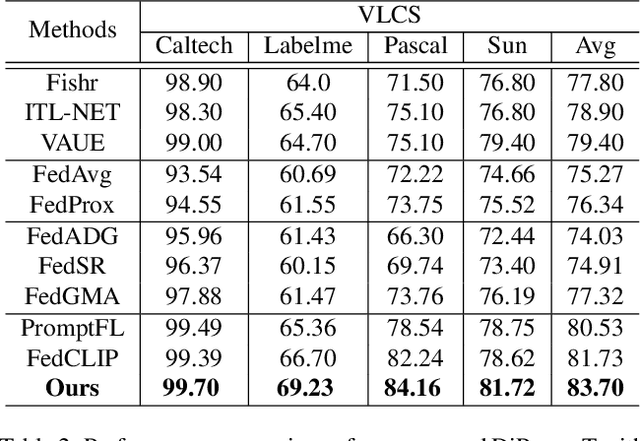
Federated learning (FL) has emerged as a powerful paradigm for learning from decentralized data, and federated domain generalization further considers the test dataset (target domain) is absent from the decentralized training data (source domains). However, most existing FL methods assume that domain labels are provided during training, and their evaluation imposes explicit constraints on the number of domains, which must strictly match the number of clients. Because of the underutilization of numerous edge devices and additional cross-client domain annotations in the real world, such restrictions may be impractical and involve potential privacy leaks. In this paper, we propose an efficient and novel approach, called Disentangled Prompt Tuning (DiPrompT), a method that tackles the above restrictions by learning adaptive prompts for domain generalization in a distributed manner. Specifically, we first design two types of prompts, i.e., global prompt to capture general knowledge across all clients and domain prompts to capture domain-specific knowledge. They eliminate the restriction on the one-to-one mapping between source domains and local clients. Furthermore, a dynamic query metric is introduced to automatically search the suitable domain label for each sample, which includes two-substep text-image alignments based on prompt tuning without labor-intensive annotation. Extensive experiments on multiple datasets demonstrate that our DiPrompT achieves superior domain generalization performance over state-of-the-art FL methods when domain labels are not provided, and even outperforms many centralized learning methods using domain labels.
POUR-Net: A Population-Prior-Aided Over-Under-Representation Network for Low-Count PET Attenuation Map Generation
Jan 25, 2024Low-dose PET offers a valuable means of minimizing radiation exposure in PET imaging. However, the prevalent practice of employing additional CT scans for generating attenuation maps (u-map) for PET attenuation correction significantly elevates radiation doses. To address this concern and further mitigate radiation exposure in low-dose PET exams, we propose POUR-Net - an innovative population-prior-aided over-under-representation network that aims for high-quality attenuation map generation from low-dose PET. First, POUR-Net incorporates an over-under-representation network (OUR-Net) to facilitate efficient feature extraction, encompassing both low-resolution abstracted and fine-detail features, for assisting deep generation on the full-resolution level. Second, complementing OUR-Net, a population prior generation machine (PPGM) utilizing a comprehensive CT-derived u-map dataset, provides additional prior information to aid OUR-Net generation. The integration of OUR-Net and PPGM within a cascade framework enables iterative refinement of $\mu$-map generation, resulting in the production of high-quality $\mu$-maps. Experimental results underscore the effectiveness of POUR-Net, showing it as a promising solution for accurate CT-free low-count PET attenuation correction, which also surpasses the performance of previous baseline methods.
Combating Data Imbalances in Federated Semi-supervised Learning with Dual Regulators
Jul 16, 2023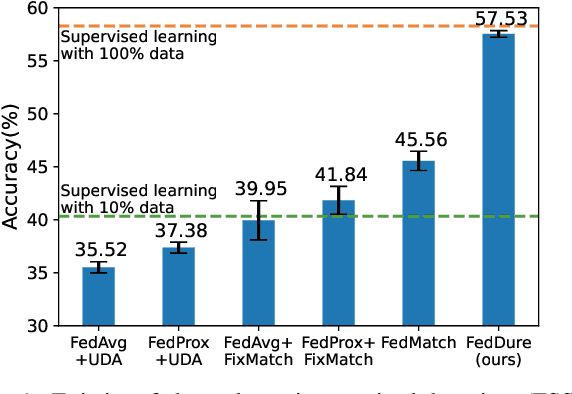
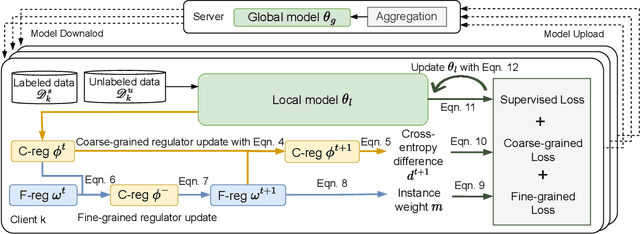
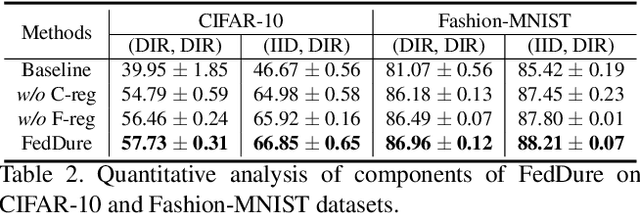
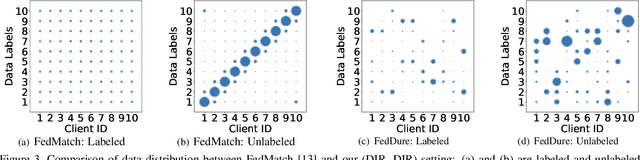
Federated learning has become a popular method to learn from decentralized heterogeneous data. Federated semi-supervised learning (FSSL) emerges to train models from a small fraction of labeled data due to label scarcity on decentralized clients. Existing FSSL methods assume independent and identically distributed (IID) labeled data across clients and consistent class distribution between labeled and unlabeled data within a client. This work studies a more practical and challenging scenario of FSSL, where data distribution is different not only across clients but also within a client between labeled and unlabeled data. To address this challenge, we propose a novel FSSL framework with dual regulators, FedDure.} FedDure lifts the previous assumption with a coarse-grained regulator (C-reg) and a fine-grained regulator (F-reg): C-reg regularizes the updating of the local model by tracking the learning effect on labeled data distribution; F-reg learns an adaptive weighting scheme tailored for unlabeled instances in each client. We further formulate the client model training as bi-level optimization that adaptively optimizes the model in the client with two regulators. Theoretically, we show the convergence guarantee of the dual regulators. Empirically, we demonstrate that FedDure is superior to the existing methods across a wide range of settings, notably by more than 11% on CIFAR-10 and CINIC-10 datasets.
An Empirical Study of Pseudo-Labeling for Image-based 3D Object Detection
Aug 15, 2022

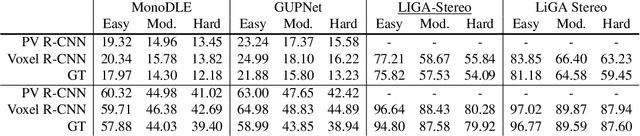
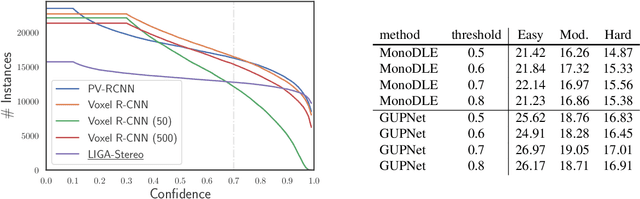
Image-based 3D detection is an indispensable component of the perception system for autonomous driving. However, it still suffers from the unsatisfying performance, one of the main reasons for which is the limited training data. Unfortunately, annotating the objects in the 3D space is extremely time/resource-consuming, which makes it hard to extend the training set arbitrarily. In this work, we focus on the semi-supervised manner and explore the feasibility of a cheaper alternative, i.e. pseudo-labeling, to leverage the unlabeled data. For this purpose, we conduct extensive experiments to investigate whether the pseudo-labels can provide effective supervision for the baseline models under varying settings. The experimental results not only demonstrate the effectiveness of the pseudo-labeling mechanism for image-based 3D detection (e.g. under monocular setting, we achieve 20.23 AP for moderate level on the KITTI-3D testing set without bells and whistles, improving the baseline model by 6.03 AP), but also show several interesting and noteworthy findings (e.g. the models trained with pseudo-labels perform better than that trained with ground-truth annotations based on the same training data). We hope this work can provide insights for the image-based 3D detection community under a semi-supervised setting. The codes, pseudo-labels, and pre-trained models will be publicly available.
StyleFlow For Content-Fixed Image to Image Translation
Jul 05, 2022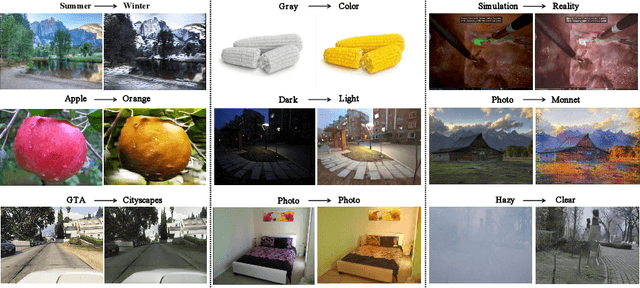
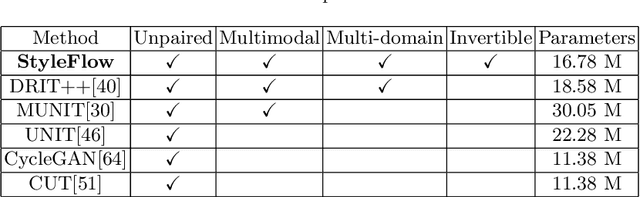
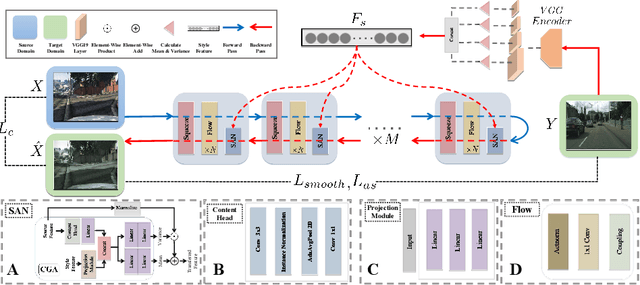
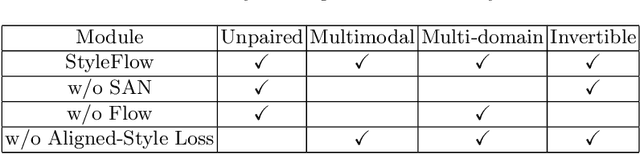
Image-to-image (I2I) translation is a challenging topic in computer vision. We divide this problem into three tasks: strongly constrained translation, normally constrained translation, and weakly constrained translation. The constraint here indicates the extent to which the content or semantic information in the original image is preserved. Although previous approaches have achieved good performance in weakly constrained tasks, they failed to fully preserve the content in both strongly and normally constrained tasks, including photo-realism synthesis, style transfer, and colorization, etc. To achieve content-preserving transfer in strongly constrained and normally constrained tasks, we propose StyleFlow, a new I2I translation model that consists of normalizing flows and a novel Style-Aware Normalization (SAN) module. With the invertible network structure, StyleFlow first projects input images into deep feature space in the forward pass, while the backward pass utilizes the SAN module to perform content-fixed feature transformation and then projects back to image space. Our model supports both image-guided translation and multi-modal synthesis. We evaluate our model in several I2I translation benchmarks, and the results show that the proposed model has advantages over previous methods in both strongly constrained and normally constrained tasks.
Probing Visual-Audio Representation for Video Highlight Detection via Hard-Pairs Guided Contrastive Learning
Jun 21, 2022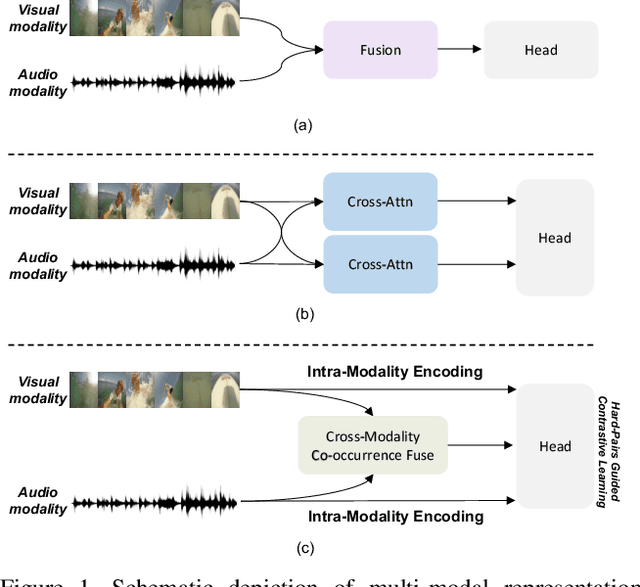

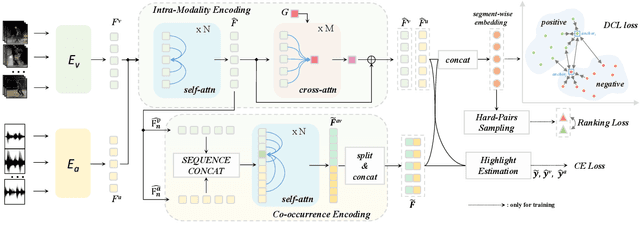
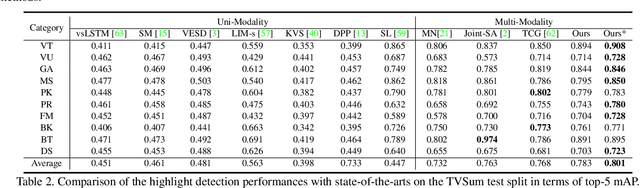
Video highlight detection is a crucial yet challenging problem that aims to identify the interesting moments in untrimmed videos. The key to this task lies in effective video representations that jointly pursue two goals, \textit{i.e.}, cross-modal representation learning and fine-grained feature discrimination. In this paper, these two challenges are tackled by not only enriching intra-modality and cross-modality relations for representation modeling but also shaping the features in a discriminative manner. Our proposed method mainly leverages the intra-modality encoding and cross-modality co-occurrence encoding for fully representation modeling. Specifically, intra-modality encoding augments the modality-wise features and dampens irrelevant modality via within-modality relation learning in both audio and visual signals. Meanwhile, cross-modality co-occurrence encoding focuses on the co-occurrence inter-modality relations and selectively captures effective information among multi-modality. The multi-modal representation is further enhanced by the global information abstracted from the local context. In addition, we enlarge the discriminative power of feature embedding with a hard-pairs guided contrastive learning (HPCL) scheme. A hard-pairs sampling strategy is further employed to mine the hard samples for improving feature discrimination in HPCL. Extensive experiments conducted on two benchmarks demonstrate the effectiveness and superiority of our proposed methods compared to other state-of-the-art methods.
Pyramid Region-based Slot Attention Network for Temporal Action Proposal Generation
Jun 21, 2022



It has been found that temporal action proposal generation, which aims to discover the temporal action instances within the range of the start and end frames in the untrimmed videos, can largely benefit from proper temporal and semantic context exploitation. The latest efforts were dedicated to considering the temporal context and similarity-based semantic contexts through self-attention modules. However, they still suffer from cluttered background information and limited contextual feature learning. In this paper, we propose a novel Pyramid Region-based Slot Attention (PRSlot) module to address these issues. Instead of using the similarity computation, our PRSlot module directly learns the local relations in an encoder-decoder manner and generates the representation of a local region enhanced based on the attention over input features called \textit{slot}. Specifically, upon the input snippet-level features, PRSlot module takes the target snippet as \textit{query}, its surrounding region as \textit{key} and then generates slot representations for each \textit{query-key} slot by aggregating the local snippet context with a parallel pyramid strategy. Based on PRSlot modules, we present a novel Pyramid Region-based Slot Attention Network termed PRSA-Net to learn a unified visual representation with rich temporal and semantic context for better proposal generation. Extensive experiments are conducted on two widely adopted THUMOS14 and ActivityNet-1.3 benchmarks. Our PRSA-Net outperforms other state-of-the-art methods. In particular, we improve the AR@100 from the previous best 50.67% to 56.12% for proposal generation and raise the mAP under 0.5 tIoU from 51.9\% to 58.7\% for action detection on THUMOS14. \textit{Code is available at} \url{https://github.com/handhand123/PRSA-Net}
Better Teacher Better Student: Dynamic Prior Knowledge for Knowledge Distillation
Jun 14, 2022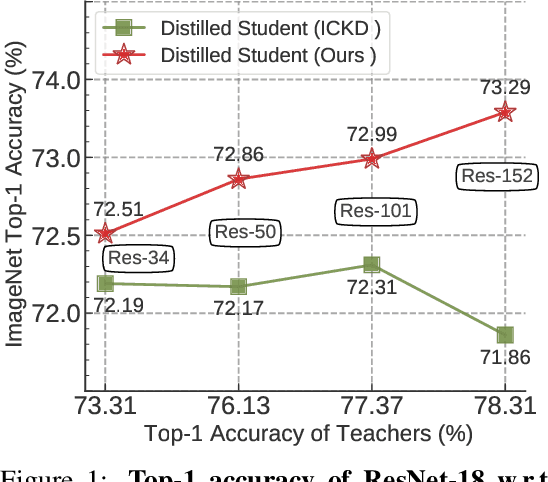
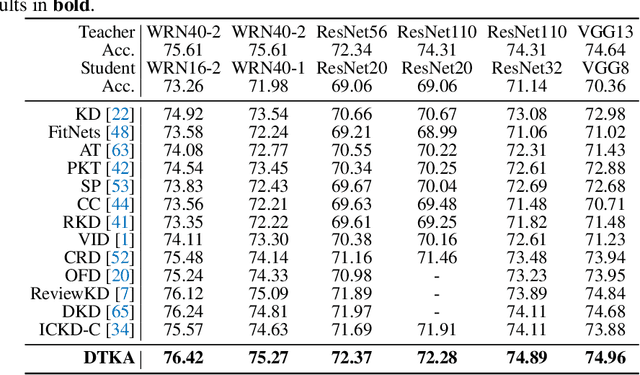
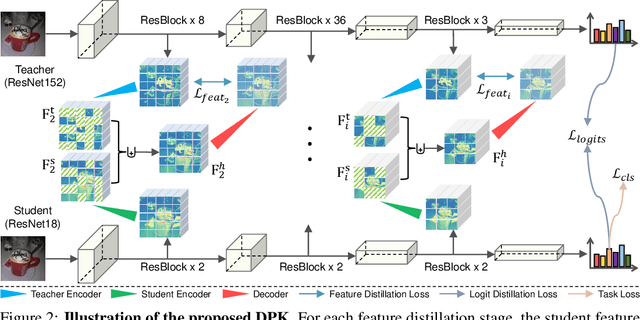

Knowledge distillation (KD) has shown very promising capabilities in transferring learning representations from large models (teachers) to small models (students). However, as the capacity gap between students and teachers becomes larger, existing KD methods fail to achieve better results. Our work shows that the 'prior knowledge' is vital to KD, especially when applying large teachers. Particularly, we propose the dynamic prior knowledge (DPK), which integrates part of the teacher's features as the prior knowledge before the feature distillation. This means that our method also takes the teacher's feature as `input', not just `target'. Besides, we dynamically adjust the ratio of the prior knowledge during the training phase according to the feature gap, thus guiding the student in an appropriate difficulty. To evaluate the proposed method, we conduct extensive experiments on two image classification benchmarks (i.e. CIFAR100 and ImageNet) and an object detection benchmark (i.e. MS COCO). The results demonstrate the superiority of our method in performance under varying settings. More importantly, our DPK makes the performance of the student model is positively correlated with that of the teacher model, which means that we can further boost the accuracy of students by applying larger teachers. Our codes will be publicly available for the reproducibility.
Inferring Prototypes for Multi-Label Few-Shot Image Classification with Word Vector Guided Attention
Dec 07, 2021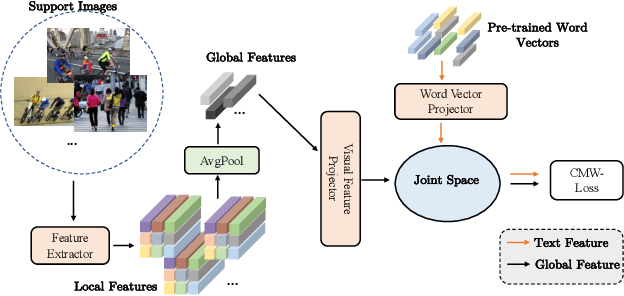
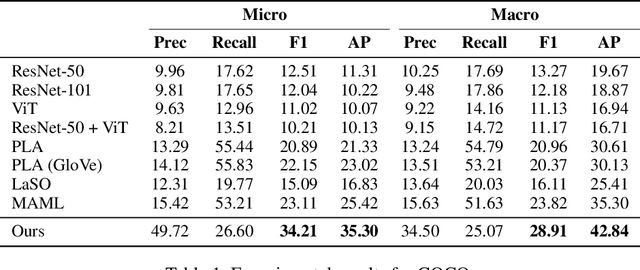
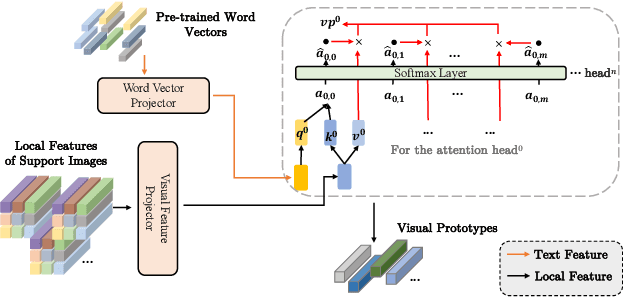
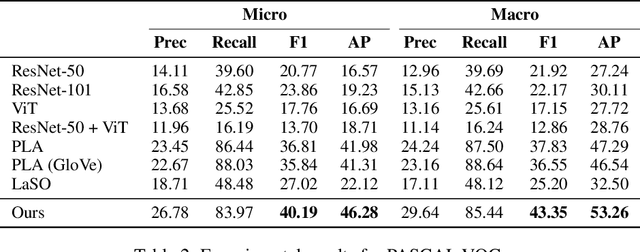
Multi-label few-shot image classification (ML-FSIC) is the task of assigning descriptive labels to previously unseen images, based on a small number of training examples. A key feature of the multi-label setting is that images often have multiple labels, which typically refer to different regions of the image. When estimating prototypes, in a metric-based setting, it is thus important to determine which regions are relevant for which labels, but the limited amount of training data makes this highly challenging. As a solution, in this paper we propose to use word embeddings as a form of prior knowledge about the meaning of the labels. In particular, visual prototypes are obtained by aggregating the local feature maps of the support images, using an attention mechanism that relies on the label embeddings. As an important advantage, our model can infer prototypes for unseen labels without the need for fine-tuning any model parameters, which demonstrates its strong generalization abilities. Experiments on COCO and PASCAL VOC furthermore show that our model substantially improves the current state-of-the-art.