 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeM. Ani Hsieh
Towards Understanding Underwater Weather Events in Rivers Using Autonomous Surface Vehicles
Dec 21, 2023
Climate change has increased the frequency and severity of extreme weather events such as hurricanes and winter storms. The complex interplay of floods with tides, runoff, and sediment creates additional hazards -- including erosion and the undermining of urban infrastructure -- consequently impacting the health of our rivers and ecosystems. Observations of these underwater phenomena are rare, because satellites and sensors mounted on aerial vehicles cannot penetrate the murky waters. Autonomous Surface Vehicles (ASVs) provides a means to track and map these complex and dynamic underwater phenomena. This work highlights preliminary results of high-resolution data gathering with ASVs, equipped with a suite of sensors capable of measuring physical and chemical parameters of the river. Measurements were acquired along the lower Schuylkill River in the Philadelphia area at high-tide and low-tide conditions. The data will be leveraged to improve our understanding of changes in bathymetry due to floods; the dynamics of mixing and stagnation zones and their impact on water quality; and the dynamics of suspension and resuspension of fine sediment. The data will also provide insight into the development of adaptive sampling strategies for ASVs that can maximize the information gain for future field experiments.
Enabling Large-scale Heterogeneous Collaboration with Opportunistic Communications
Sep 27, 2023Multi-robot collaboration in large-scale environments with limited-sized teams and without external infrastructure is challenging, since the software framework required to support complex tasks must be robust to unreliable and intermittent communication links. In this work, we present MOCHA (Multi-robot Opportunistic Communication for Heterogeneous Collaboration), a framework for resilient multi-robot collaboration that enables large-scale exploration in the absence of continuous communications. MOCHA is based on a gossip communication protocol that allows robots to interact opportunistically whenever communication links are available, propagating information on a peer-to-peer basis. We demonstrate the performance of MOCHA through real-world experiments with commercial-off-the-shelf (COTS) communication hardware. We further explore the system's scalability in simulation, evaluating the performance of our approach as the number of robots increases and communication ranges vary. Finally, we demonstrate how MOCHA can be tightly integrated with the planning stack of autonomous robots. We show a communication-aware planning algorithm for a high-altitude aerial robot executing a collaborative task while maximizing the amount of information shared with ground robots. The source code for MOCHA and the high-altitude UAV planning system is available open source: http://github.com/KumarRobotics/MOCHA, http://github.com/KumarRobotics/air_router.
TOPPQuad: Dynamically-Feasible Time Optimal Path Parametrization for Quadrotors
Sep 20, 2023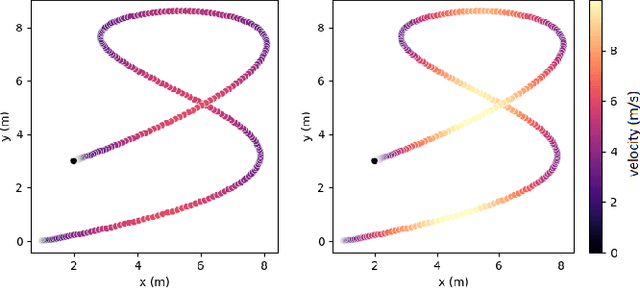
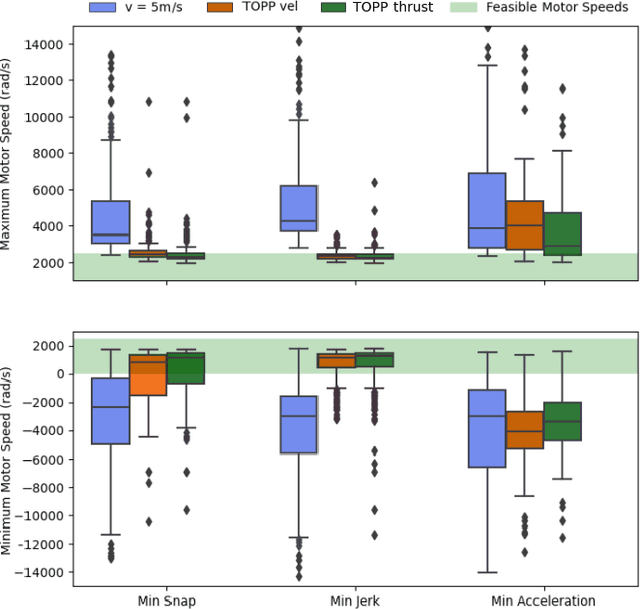
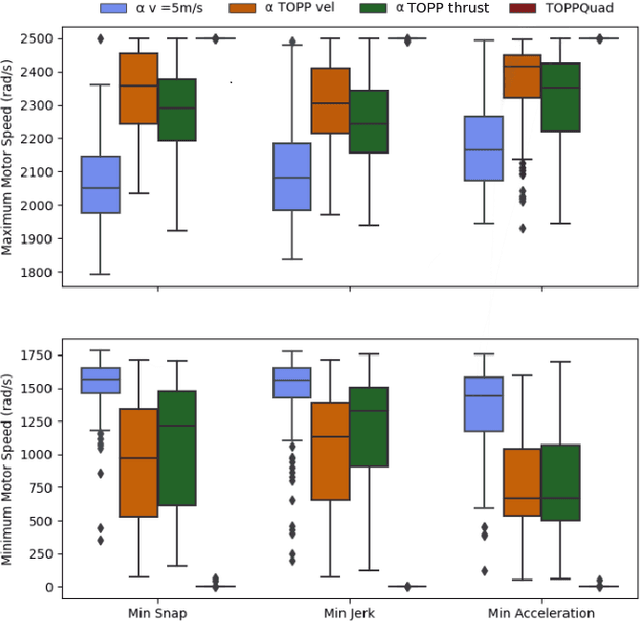
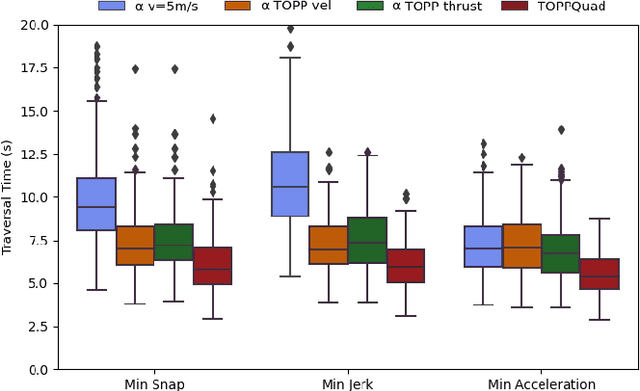
Planning time-optimal trajectories for quadrotors in cluttered environments is a challenging, non-convex problem. This paper addresses minimizing the traversal time of a given collision-free geometric path without violating bounds on individual motor thrusts of the vehicle. Previous approaches have either relied on convex relaxations that do not guarantee dynamic feasibility, or have generated overly conservative time parametrizations. We propose TOPPQuad, a time-optimal path parameterization algorithm for quadrotors which explicitly incorporates quadrotor rigid body dynamics and constraints such as bounds on inputs (including motor speeds) and state of the vehicle (including the pose, linear and angular velocity and acceleration). We demonstrate the ability of the planner to generate faster trajectories that respect hardware constraints of the robot compared to several planners with relaxed notions of dynamic feasibility. We also demonstrate how TOPPQuad can be used to plan trajectories for quadrotors that utilize bidirectional motors. Overall, the proposed approach paves a way towards maximizing the efficacy of autonomous micro aerial vehicles while ensuring their safety.
Safety Filter Design for Neural Network Systems via Convex Optimization
Aug 28, 2023
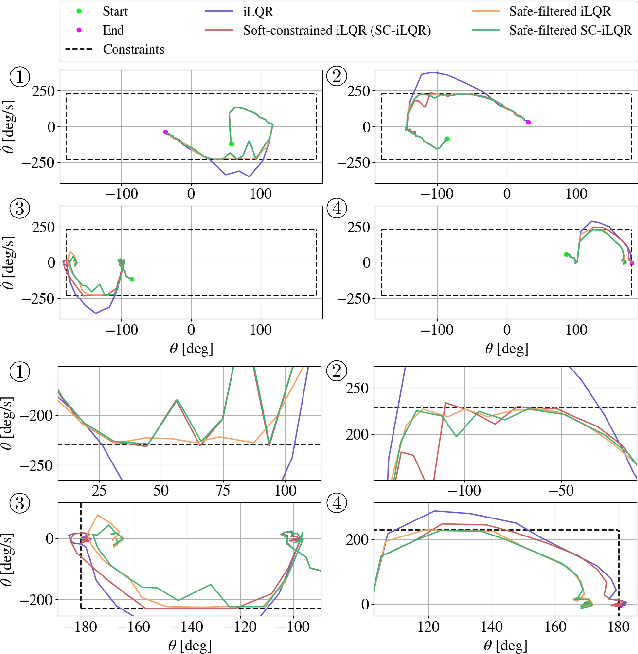
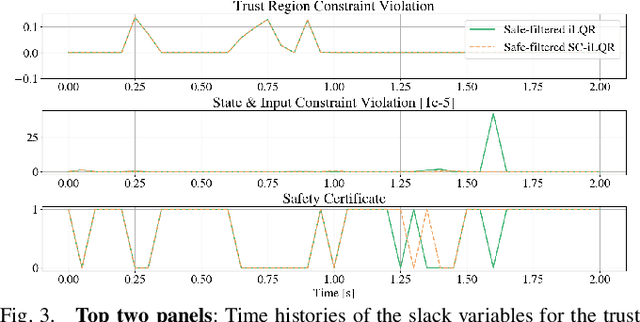

With the increase in data availability, it has been widely demonstrated that neural networks (NN) can capture complex system dynamics precisely in a data-driven manner. However, the architectural complexity and nonlinearity of the NNs make it challenging to synthesize a provably safe controller. In this work, we propose a novel safety filter that relies on convex optimization to ensure safety for a NN system, subject to additive disturbances that are capable of capturing modeling errors. Our approach leverages tools from NN verification to over-approximate NN dynamics with a set of linear bounds, followed by an application of robust linear MPC to search for controllers that can guarantee robust constraint satisfaction. We demonstrate the efficacy of the proposed framework numerically on a nonlinear pendulum system.
Enhancing Sample Efficiency and Uncertainty Compensation in Learning-based Model Predictive Control for Aerial Robots
Aug 01, 2023



The recent increase in data availability and reliability has led to a surge in the development of learning-based model predictive control (MPC) frameworks for robot systems. Despite attaining substantial performance improvements over their non-learning counterparts, many of these frameworks rely on an offline learning procedure to synthesize a dynamics model. This implies that uncertainties encountered by the robot during deployment are not accounted for in the learning process. On the other hand, learning-based MPC methods that learn dynamics models online are computationally expensive and often require a significant amount of data. To alleviate these shortcomings, we propose a novel learning-enhanced MPC framework that incorporates components from $\mathcal{L}_1$ adaptive control into learning-based MPC. This integration enables the accurate compensation of both matched and unmatched uncertainties in a sample-efficient way, enhancing the control performance during deployment. In our proposed framework, we present two variants and apply them to the control of a quadrotor system. Through simulations and physical experiments, we demonstrate that the proposed framework not only allows the synthesis of an accurate dynamics model on-the-fly, but also significantly improves the closed-loop control performance under a wide range of spatio-temporal uncertainties.
EV-Catcher: High-Speed Object Catching Using Low-latency Event-based Neural Networks
Apr 14, 2023



Event-based sensors have recently drawn increasing interest in robotic perception due to their lower latency, higher dynamic range, and lower bandwidth requirements compared to standard CMOS-based imagers. These properties make them ideal tools for real-time perception tasks in highly dynamic environments. In this work, we demonstrate an application where event cameras excel: accurately estimating the impact location of fast-moving objects. We introduce a lightweight event representation called Binary Event History Image (BEHI) to encode event data at low latency, as well as a learning-based approach that allows real-time inference of a confidence-enabled control signal to the robot. To validate our approach, we present an experimental catching system in which we catch fast-flying ping-pong balls. We show that the system is capable of achieving a success rate of 81% in catching balls targeted at different locations, with a velocity of up to 13 m/s even on compute-constrained embedded platforms such as the Nvidia Jetson NX.
Leveraging Predictive Models for Adaptive Sampling of Spatiotemporal Fluid Processes
Apr 03, 2023
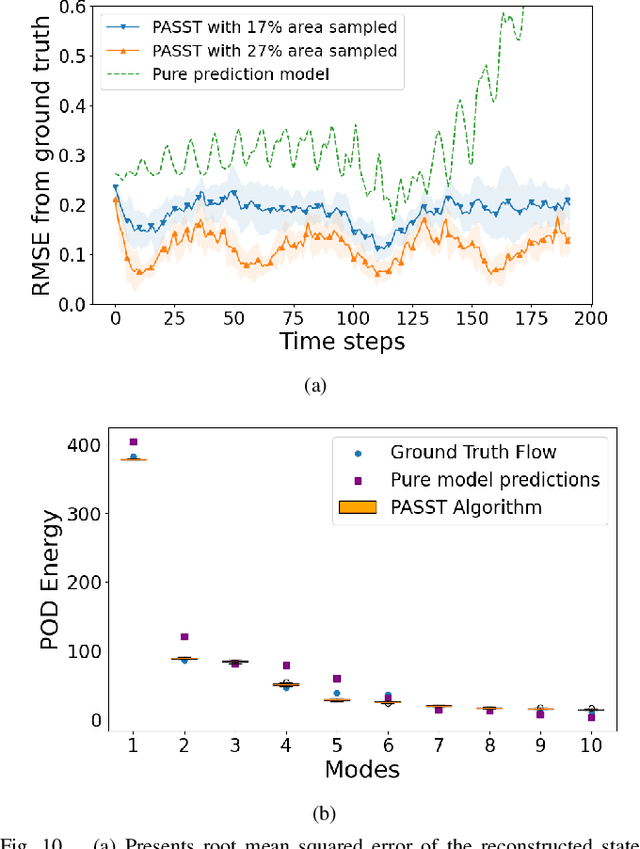
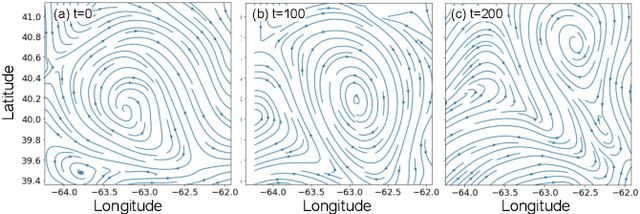
Persistent monitoring of a spatiotemporal fluid process requires data sampling and predictive modeling of the process being monitored. In this paper we present PASST algorithm: Predictive-model based Adaptive Sampling of a Spatio-Temporal process. PASST is an adaptive robotic sampling algorithm that leverages predictive models to efficiently and persistently monitor a fluid process in a given region of interest. Our algorithm makes use of the predictions from a learned prediction model to plan a path for an autonomous vehicle to adaptively and efficiently survey the region of interest. In turn, the sampled data is used to obtain better predictions by giving an updated initial state to the predictive model. For predictive model, we use Knowledged-based Neural Ordinary Differential Equations to train models of fluid processes. These models are orders of magnitude smaller in size and run much faster than fluid data obtained from direct numerical simulations of the partial differential equations that describe the fluid processes or other comparable computational fluids models. For path planning, we use reinforcement learning based planning algorithms that use the field predictions as reward functions. We evaluate our adaptive sampling path planning algorithm on both numerically simulated fluid data and real-world nowcast ocean flow data to show that we can sample the spatiotemporal field in the given region of interest for long time horizons. We also evaluate PASST algorithm's generalization ability to sample from fluid processes that are not in the training repertoire of the learned models.
Stochastic Nonlinear Ensemble Modeling and Control for Robot Team Environmental Monitoring
Dec 22, 2022



We seek methods to model, control, and analyze robot teams performing environmental monitoring tasks. During environmental monitoring, the goal is to have teams of robots collect various data throughout a fixed region for extended periods of time. Standard bottom-up task assignment methods do not scale as the number of robots and task locations increases and require computationally expensive replanning. Alternatively, top-down methods have been used to combat computational complexity, but most have been limited to the analysis of methods which focus on transition times between tasks. In this work, we study a class of nonlinear macroscopic models which we use to control a time-varying distribution of robots performing different tasks throughout an environment. Our proposed ensemble model and control maintains desired time-varying populations of robots by leveraging naturally occurring interactions between robots performing tasks. We validate our approach at multiple fidelity levels including experimental results, suggesting the effectiveness of our approach to perform environmental monitoring.
Receding Horizon Control on the Broadcast of Information in Stochastic Networks
Dec 19, 2022



This paper focuses on the broadcast of information on robot networks with stochastic network interconnection topologies. Problematic communication networks are almost unavoidable in areas where we wish to deploy multi-robotic systems, usually due to a lack of environmental consistency, accessibility, and structure. We tackle this problem by modeling the broadcast of information in a multi-robot communication network as a stochastic process with random arrival times, which can be produced by irregular robot movements, wireless attenuation, and other environmental factors. Using this model, we provide and analyze a receding horizon control strategy to control the statistics of the information broadcast. The resulting strategy compels the robots to re-direct their communication resources to different neighbors according to the current propagation process to fulfill global broadcast requirements. Based on this method, we provide an approach to compute the expected time to broadcast the message to all nodes. Numerical examples are provided to illustrate the results.
Proportional Control for Stochastic Regulation on Allocation of Multi-Robots
Dec 19, 2022



Any strategy used to distribute a robot ensemble over a set of sequential tasks is subject to inaccuracy due to robot-level uncertainties and environmental influences on the robots' behavior. We approach the problem of inaccuracy during task allocation by modeling and controlling the overall ensemble behavior. Our model represents the allocation problem as a stochastic jump process and we regulate the mean and variance of such a process. The main contributions of this paper are: Establishing a structure for the transition rates of the equivalent stochastic jump process and formally showing that this approach leads to decoupled parameters that allow us to adjust the first- and second-order moments of the ensemble distribution over tasks, which gives the flexibility to decrease the variance in the desired final distribution. This allows us to directly shape the impact of uncertainties on the group allocation over tasks. We introduce a detailed procedure to design the gains to achieve the desired mean and show how the additional parameters impact the covariance matrix, which is directly associated with the degree of task allocation precision. Our simulation and experimental results illustrate the successful control of several robot ensembles during task allocation.