 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMuqing Cao
AirCrab: A Hybrid Aerial-Ground Manipulator with An Active Wheel
Mar 23, 2024
Inspired by the behavior of birds, we present AirCrab, a hybrid aerial ground manipulator (HAGM) with a single active wheel and a 3-degree of freedom (3-DoF) manipulator. AirCrab leverages a single point of contact with the ground to reduce position drift and improve manipulation accuracy. The single active wheel enables locomotion on narrow surfaces without adding significant weight to the robot. To realize accurate attitude maintenance using propellers on the ground, we design a control allocation method for AirCrab that prioritizes attitude control and dynamically adjusts the thrust input to reduce energy consumption. Experiments verify the effectiveness of the proposed control method and the gain in manipulation accuracy with ground contact. A series of operations to complete the letters 'NTU' demonstrates the capability of the robot to perform challenging hybrid aerial-ground manipulation missions.
HCTO: Optimality-Aware LiDAR Inertial Odometry with Hybrid Continuous Time Optimization for Compact Wearable Mapping System
Mar 21, 2024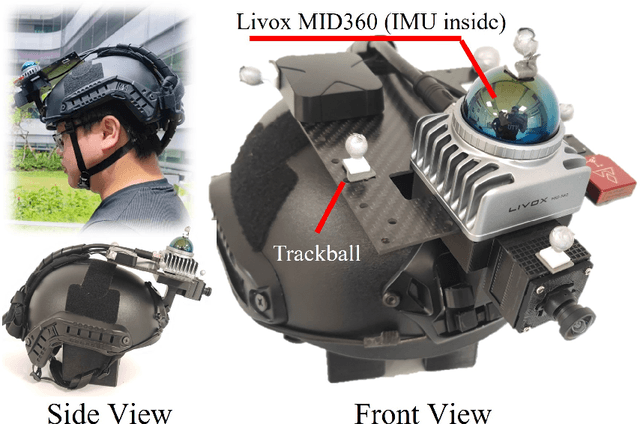

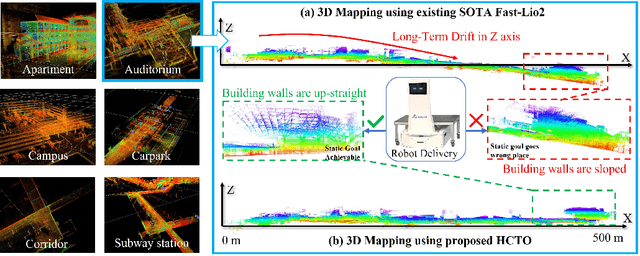
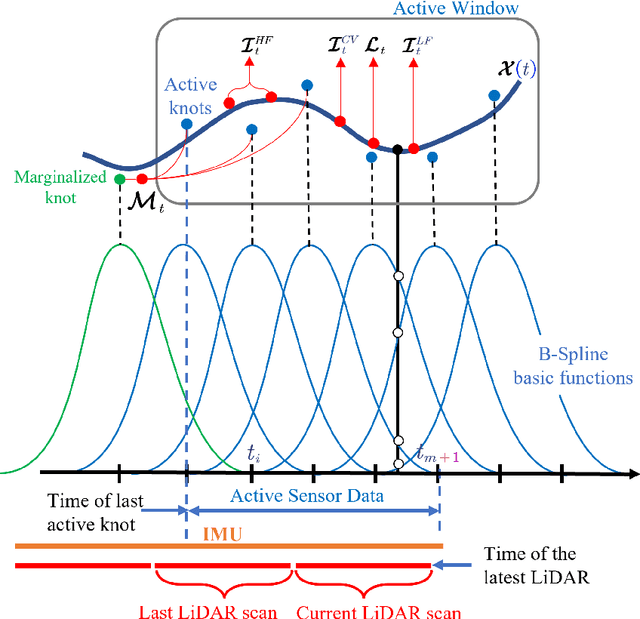
Compact wearable mapping system (WMS) has gained significant attention due to their convenience in various applications. Specifically, it provides an efficient way to collect prior maps for 3D structure inspection and robot-based "last-mile delivery" in complex environments. However, vibrations in human motion and the uneven distribution of point cloud features in complex environments often lead to rapid drift, which is a prevalent issue when applying existing LiDAR Inertial Odometry (LIO) methods on low-cost WMS. To address these limitations, we propose a novel LIO for WMSs based on Hybrid Continuous Time Optimization (HCTO) considering the optimality of Lidar correspondences. First, HCTO recognizes patterns in human motion (high-frequency part, low-frequency part, and constant velocity part) by analyzing raw IMU measurements. Second, HCTO constructs hybrid IMU factors according to different motion states, which enables robust and accurate estimation against vibration-induced noise in the IMU measurements. Third, the best point correspondences are selected using optimal design to achieve real-time performance and better odometry accuracy. We conduct experiments on head-mounted WMS datasets to evaluate the performance of our system, demonstrating significant advantages over state-of-the-art methods. Video recordings of experiments can be found on the project page of HCTO: \href{https://github.com/kafeiyin00/HCTO}{https://github.com/kafeiyin00/HCTO}.
A Cost-Effective Cooperative Exploration and Inspection Strategy for Heterogeneous Aerial System
Mar 02, 2024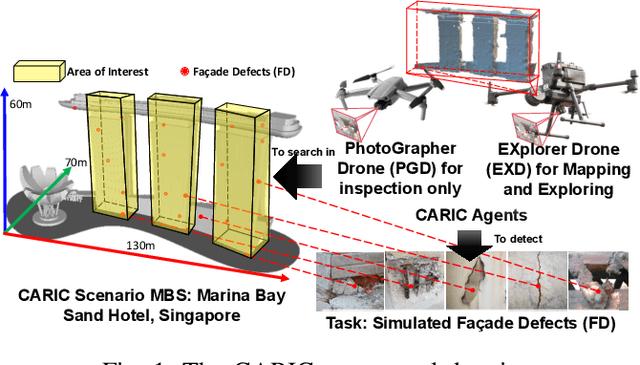
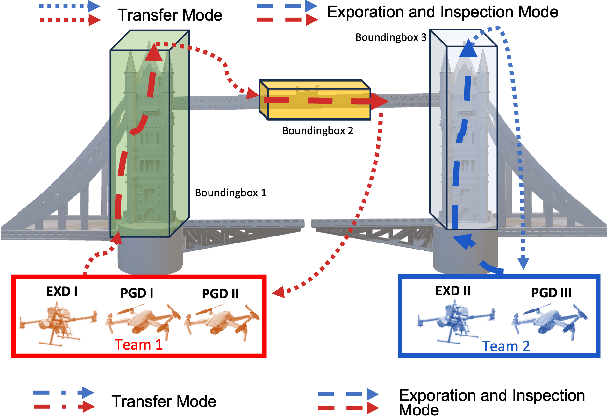
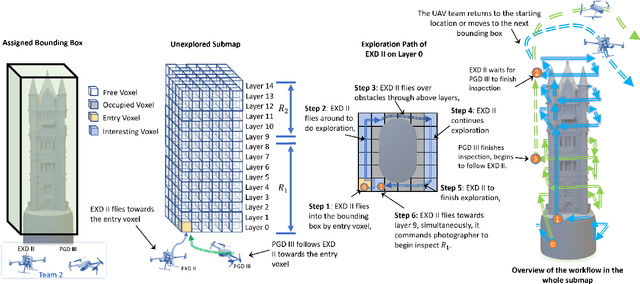
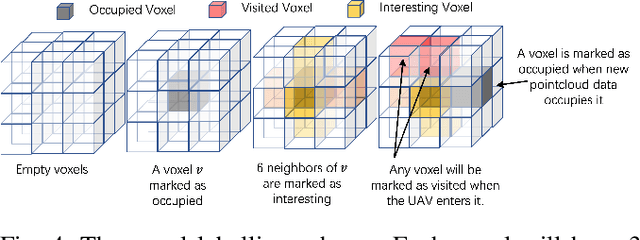
In this paper, we propose a cost-effective strategy for heterogeneous UAV swarm systems for cooperative aerial inspection. Unlike previous swarm inspection works, the proposed method does not rely on precise prior knowledge of the environment and can complete full 3D surface coverage of objects in any shape. In this work, agents are partitioned into teams, with each drone assign a different task, including mapping, exploration, and inspection. Task allocation is facilitated by assigning optimal inspection volumes to each team, following best-first rules. A voxel map-based representation of the environment is used for pathfinding, and a rule-based path-planning method is the core of this approach. We achieved the best performance in all challenging experiments with the proposed approach, surpassing all benchmark methods for similar tasks across multiple evaluation trials. The proposed method is open source at https://github.com/ntu-aris/caric_baseline and used as the baseline of the Cooperative Aerial Robots Inspection Challenge at the 62nd IEEE Conference on Decision and Control 2023.
CapsuleBot: A Novel Compact Hybrid Aerial-Ground Robot with Two Actuated-wheel-rotors
Sep 17, 2023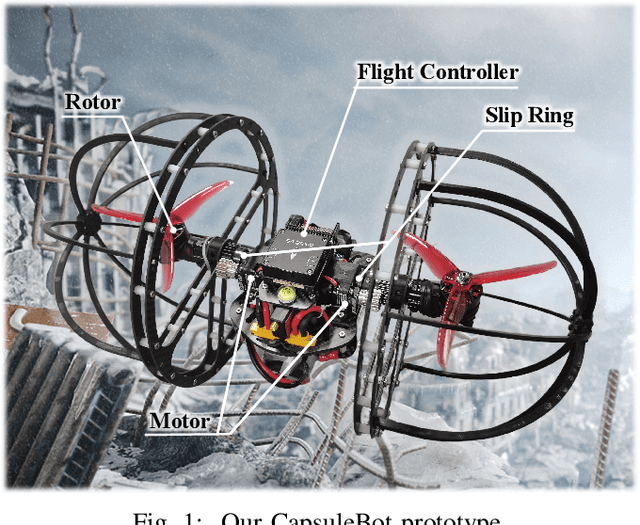
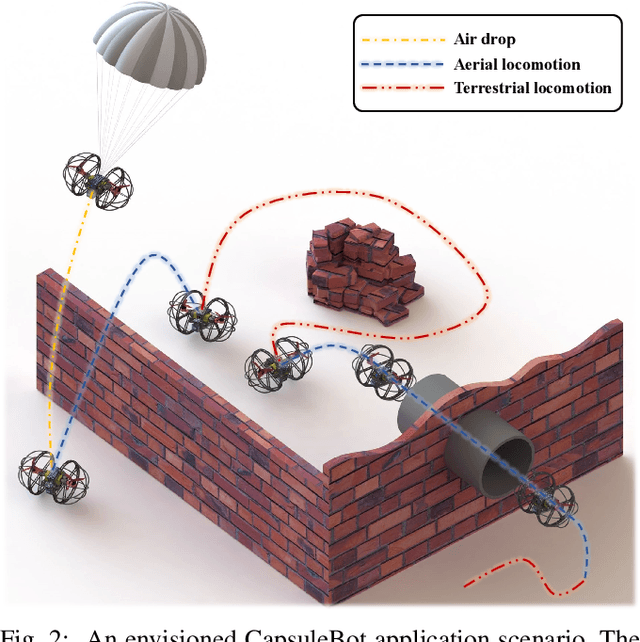
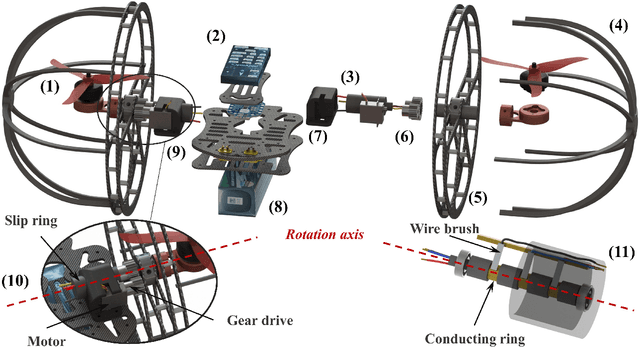
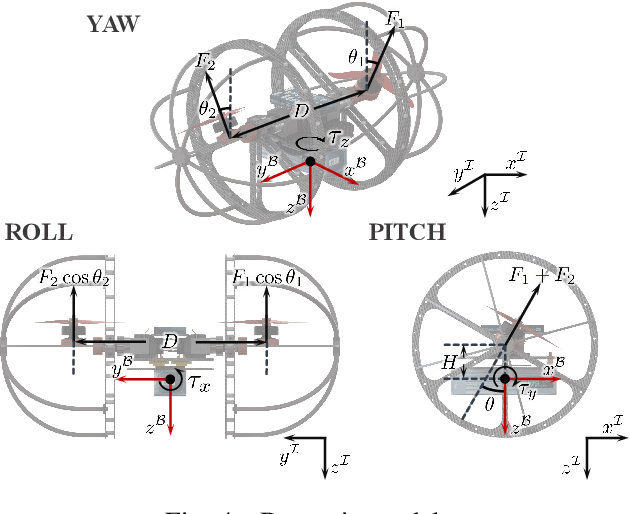
This paper presents the design, modeling, and experimental validation of CapsuleBot, a compact hybrid aerial-ground vehicle designed for long-term covert reconnaissance. CapsuleBot combines the manoeuvrability of bicopter in the air with the energy efficiency and noise reduction of ground vehicles on the ground. To accomplish this, a structure named actuated-wheel-rotor has been designed, utilizing a sole motor for both the unilateral rotor tilting in the bicopter configuration and the wheel movement in ground mode. CapsuleBot comes equipped with two of these structures, enabling it to attain hybrid aerial-ground propulsion with just four motors. Importantly, the decoupling of motion modes is achieved without the need for additional drivers, enhancing the versatility and robustness of the system. Furthermore, we have designed the full dynamics and control for aerial and ground locomotion based on the bicopter model and the two-wheeled self-balancing vehicle model. The performance of CapsuleBot has been validated through experiments. The results demonstrate that CapsuleBot produces 40.53% less noise in ground mode and consumes 99.35% less energy, highlighting its potential for long-term covert reconnaissance applications.
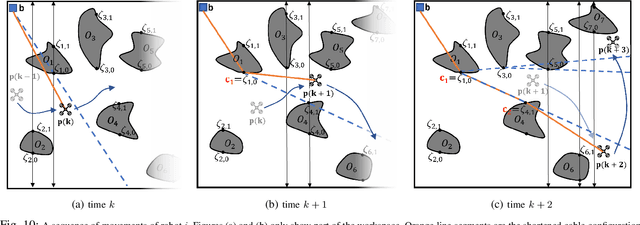
Path Planning for Multiple Tethered Robots Using Topological Braids
Apr 29, 2023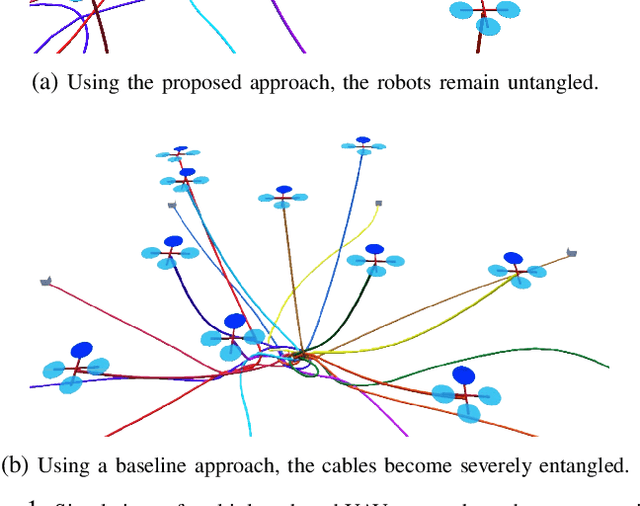
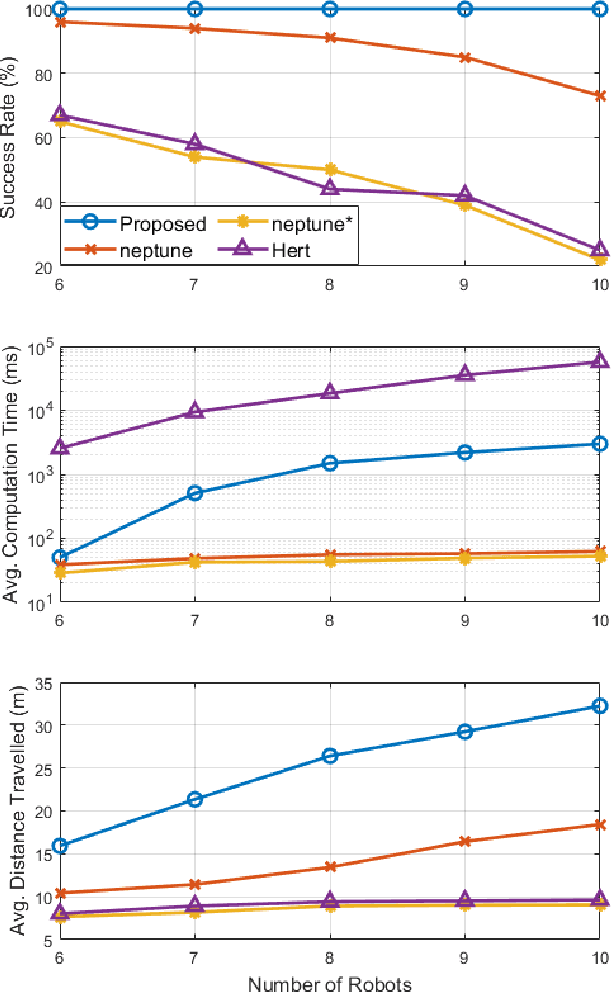
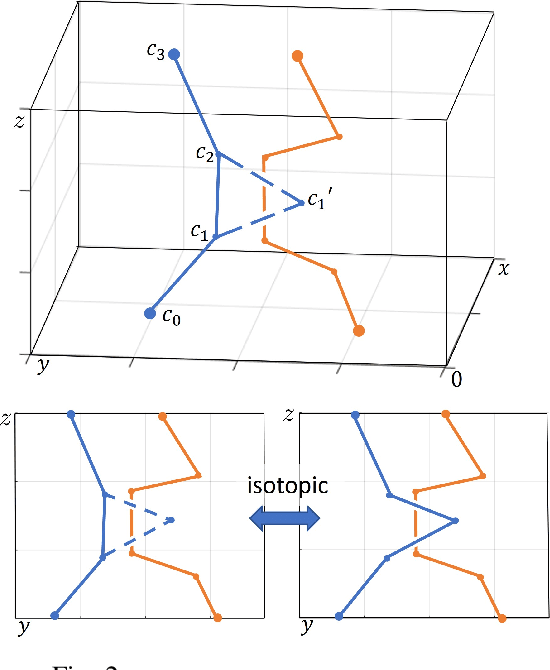
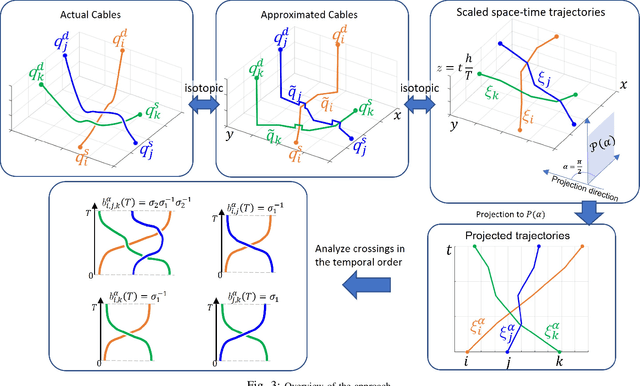
Path planning for multiple tethered robots is a challenging problem due to the complex interactions among the cables and the possibility of severe entanglements. Previous works on this problem either consider idealistic cable models or provide no guarantee for entanglement-free paths. In this work, we present a new approach to address this problem using the theory of braids. By establishing a topological equivalence between the physical cables and the space-time trajectories of the robots, and identifying particular braid patterns that emerge from the entangled trajectories, we obtain the key finding that all complex entanglements stem from a finite number of interaction patterns between 2 or 3 robots. Hence, non-entanglement can be guaranteed by avoiding these interaction patterns in the trajectories of the robots. Based on this finding, we present a graph search algorithm using the permutation grid to efficiently search for a feasible topology of paths and reject braid patterns that result in an entanglement. We demonstrate that the proposed algorithm can achieve 100% goal-reaching capability without entanglement for up to 10 drones with a slack cable model in a high-fidelity simulation platform. The practicality of the proposed approach is verified using three small tethered UAVs in indoor flight experiments.
DoubleBee: A Hybrid Aerial-Ground Robot with Two Active Wheels
Mar 20, 2023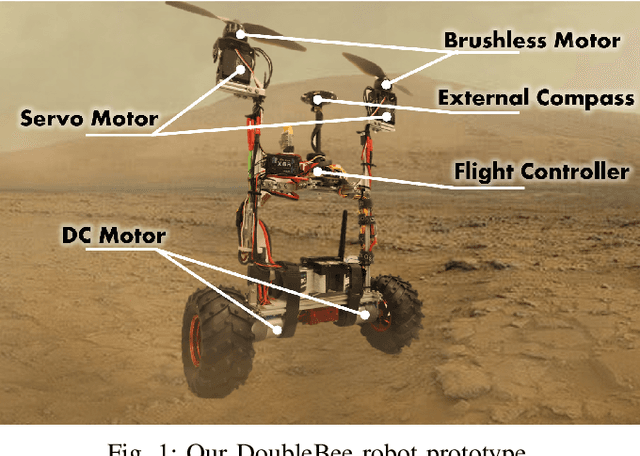
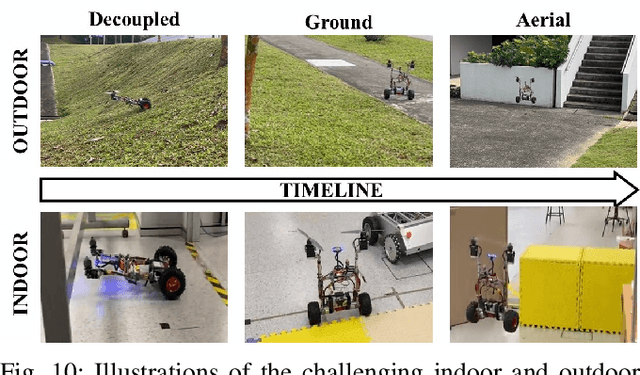
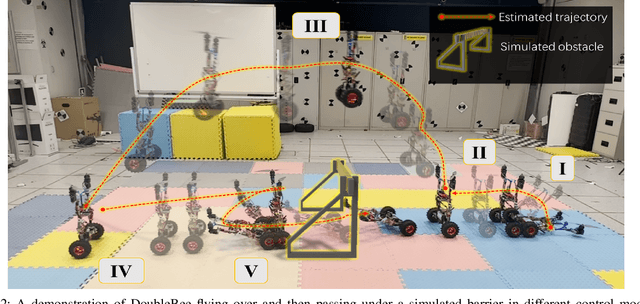
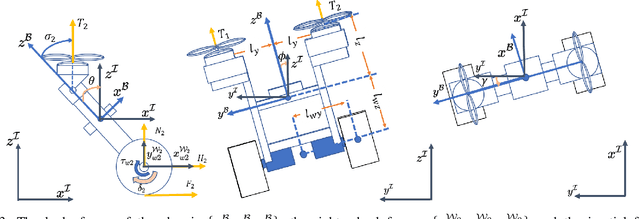
We present the dynamic model and control of DoubleBee, a novel hybrid aerial-ground vehicle consisting of two propellers mounted on tilting servo motors and two motor-driven wheels. DoubleBee exploits the high energy efficiency of a bicopter configuration in aerial mode, and enjoys the low power consumption of a two-wheel self-balancing robot on the ground. Furthermore, the propeller thrusts act as additional control inputs on the ground, enabling a novel decoupled control scheme where the attitude of the robot is controlled using thrusts and the translational motion is realized using wheels. A prototype of DoubleBee is constructed using commercially available components. The power efficiency and the control performance of the robot are verified through comprehensive experiments. Challenging tasks in indoor and outdoor environments demonstrate the capability of DoubleBee to traverse unstructured environments, fly over and move under barriers, and climb steep and rough terrains.
NEPTUNE: Non-Entangling Planning for Multiple Tethered Unmanned Vehicles
Dec 03, 2022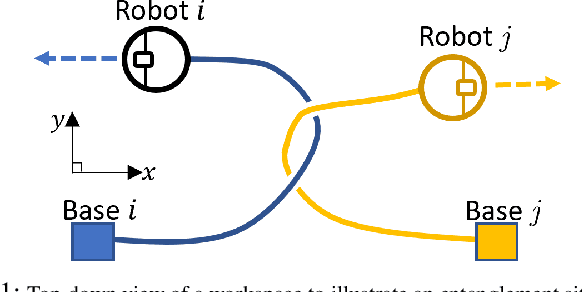
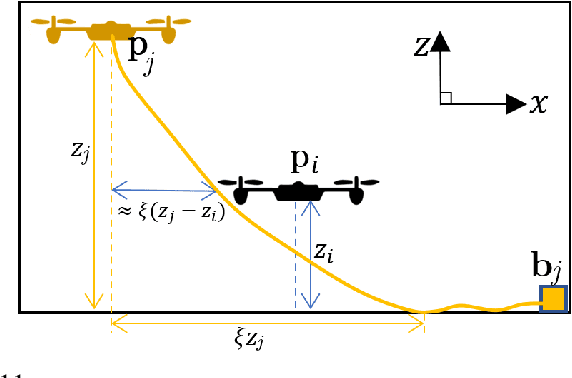
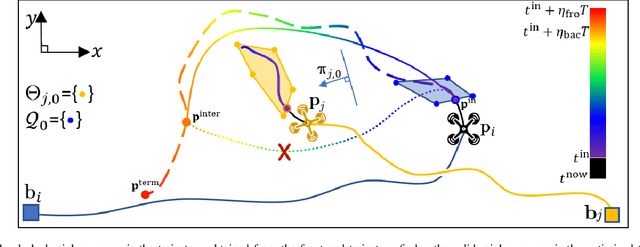
Despite recent progress on trajectory planning of multiple robots and path planning of a single tethered robot, planning of multiple tethered robots to reach their individual targets without entanglements remains a challenging problem. In this paper, we present a complete approach to address this problem. Firstly, we propose a multi-robot tether-aware representation of homotopy, using which we can efficiently evaluate the feasibility and safety of a potential path in terms of (1) the cable length required to reach a target following the path, and (2) the risk of entanglements with the cables of other robots. Then, the proposed representation is applied in a decentralized and online planning framework that includes a graph-based kinodynamic trajectory finder and an optimization-based trajectory refinement, to generate entanglement-free, collision-free and dynamically feasible trajectories. The efficiency of the proposed homotopy representation is compared against existing single and multiple tethered robot planning approaches. Simulations with up to 8 UAVs show the effectiveness of the approach in entanglement prevention and its real-time capabilities. Flight experiments using 3 tethered UAVs verify the practicality of the presented approach.
NTU VIRAL: A Visual-Inertial-Ranging-Lidar Dataset, From an Aerial Vehicle Viewpoint
Feb 01, 2022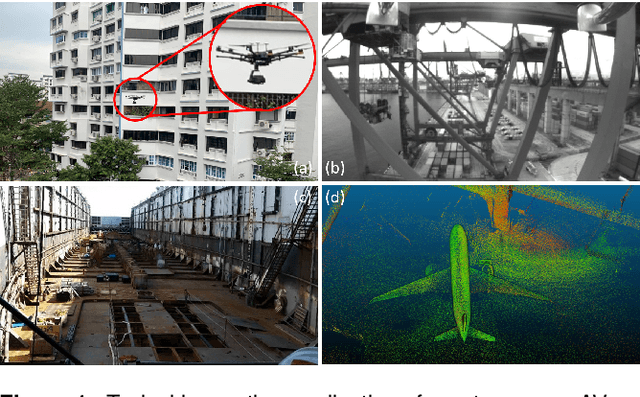
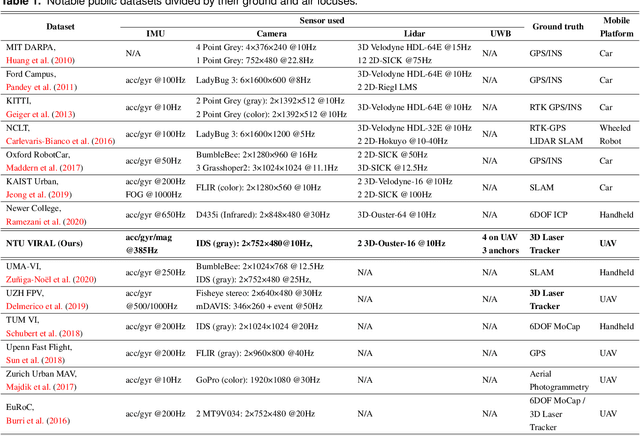
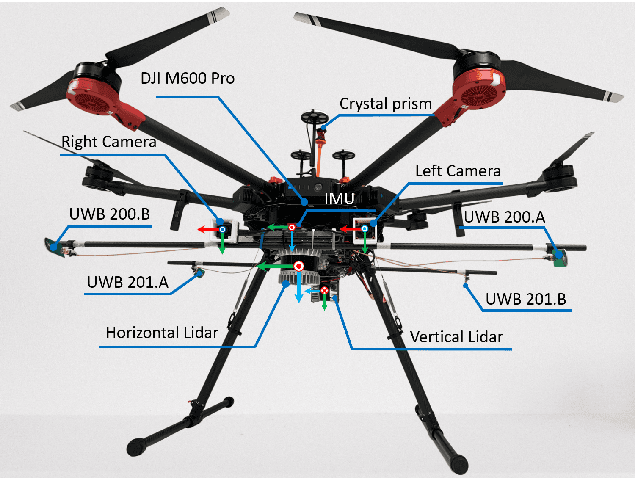
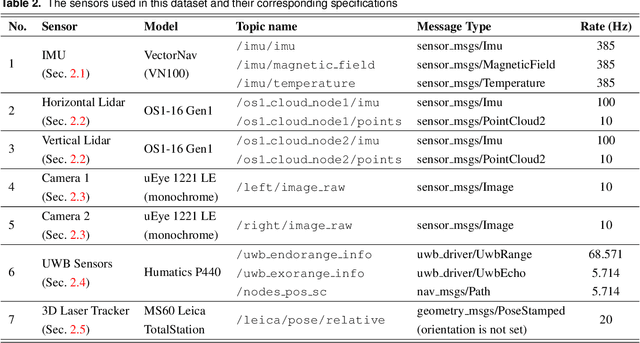
In recent years, autonomous robots have become ubiquitous in research and daily life. Among many factors, public datasets play an important role in the progress of this field, as they waive the tall order of initial investment in hardware and manpower. However, for research on autonomous aerial systems, there appears to be a relative lack of public datasets on par with those used for autonomous driving and ground robots. Thus, to fill in this gap, we conduct a data collection exercise on an aerial platform equipped with an extensive and unique set of sensors: two 3D lidars, two hardware-synchronized global-shutter cameras, multiple Inertial Measurement Units (IMUs), and especially, multiple Ultra-wideband (UWB) ranging units. The comprehensive sensor suite resembles that of an autonomous driving car, but features distinct and challenging characteristics of aerial operations. We record multiple datasets in several challenging indoor and outdoor conditions. Calibration results and ground truth from a high-accuracy laser tracker are also included in each package. All resources can be accessed via our webpage https://ntu-aris.github.io/ntu_viral_dataset.
DIRECT: A Differential Dynamic Programming Based Framework for Trajectory Generation
Sep 10, 2021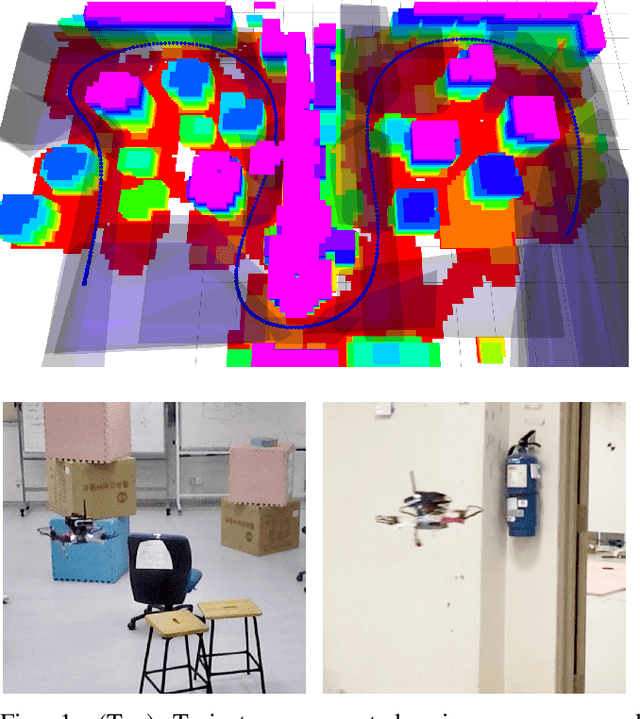
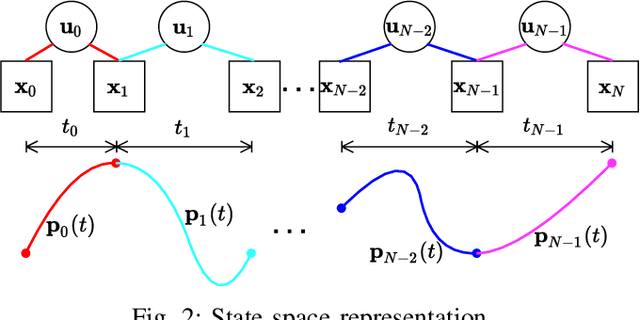
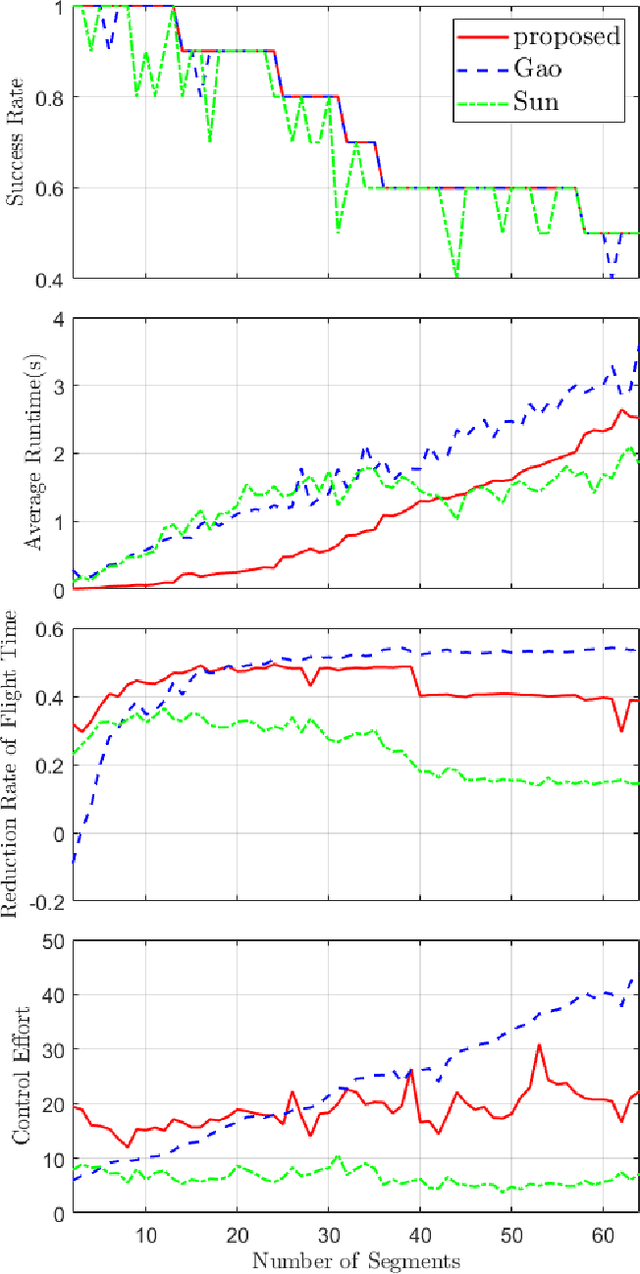
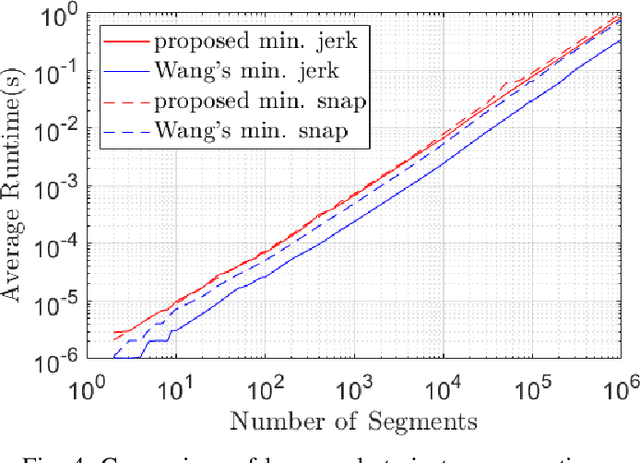
This paper introduces a differential dynamic programming (DDP) based framework for polynomial trajectory generation for differentially flat systems. In particular, instead of using a linear equation with increasing size to represent multiple polynomial segments as in literature, we take a new perspective from state-space representation such that the linear equation reduces to a finite horizon control system with a fixed state dimension and the required continuity conditions for consecutive polynomials are automatically satisfied. Consequently, the constrained trajectory generation problem (both with and without time optimization) can be converted to a discrete-time finite-horizon optimal control problem with inequality constraints, which can be approached by a recently developed interior-point DDP (IPDDP) algorithm. Furthermore, for unconstrained trajectory generation with preallocated time, we show that this problem is indeed a linear-quadratic tracking (LQT) problem (DDP algorithm with exact one iteration). All these algorithms enjoy linear complexity with respect to the number of segments. Both numerical comparisons with state-of-the-art methods and physical experiments are presented to verify and validate the effectiveness of our theoretical findings. The implementation code will be open-sourced,