 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhilip H. S. Torr
Continual Learning on a Diet: Learning from Sparsely Labeled Streams Under Constrained Computation
Apr 19, 2024
We propose and study a realistic Continual Learning (CL) setting where learning algorithms are granted a restricted computational budget per time step while training. We apply this setting to large-scale semi-supervised Continual Learning scenarios with sparse label rates. Previous proficient CL methods perform very poorly in this challenging setting. Overfitting to the sparse labeled data and insufficient computational budget are the two main culprits for such a poor performance. Our new setting encourages learning methods to effectively and efficiently utilize the unlabeled data during training. To that end, we propose a simple but highly effective baseline, DietCL, which utilizes both unlabeled and labeled data jointly. DietCL meticulously allocates computational budget for both types of data. We validate our baseline, at scale, on several datasets, e.g., CLOC, ImageNet10K, and CGLM, under constraint budget setups. DietCL outperforms, by a large margin, all existing supervised CL algorithms as well as more recent continual semi-supervised methods. Our extensive analysis and ablations demonstrate that DietCL is stable under a full spectrum of label sparsity, computational budget, and various other ablations.
No "Zero-Shot" Without Exponential Data: Pretraining Concept Frequency Determines Multimodal Model Performance
Apr 08, 2024Web-crawled pretraining datasets underlie the impressive "zero-shot" evaluation performance of multimodal models, such as CLIP for classification/retrieval and Stable-Diffusion for image generation. However, it is unclear how meaningful the notion of "zero-shot" generalization is for such multimodal models, as it is not known to what extent their pretraining datasets encompass the downstream concepts targeted for during "zero-shot" evaluation. In this work, we ask: How is the performance of multimodal models on downstream concepts influenced by the frequency of these concepts in their pretraining datasets? We comprehensively investigate this question across 34 models and five standard pretraining datasets (CC-3M, CC-12M, YFCC-15M, LAION-400M, LAION-Aesthetics), generating over 300GB of data artifacts. We consistently find that, far from exhibiting "zero-shot" generalization, multimodal models require exponentially more data to achieve linear improvements in downstream "zero-shot" performance, following a sample inefficient log-linear scaling trend. This trend persists even when controlling for sample-level similarity between pretraining and downstream datasets, and testing on purely synthetic data distributions. Furthermore, upon benchmarking models on long-tailed data sampled based on our analysis, we demonstrate that multimodal models across the board perform poorly. We contribute this long-tail test set as the "Let it Wag!" benchmark to further research in this direction. Taken together, our study reveals an exponential need for training data which implies that the key to "zero-shot" generalization capabilities under large-scale training paradigms remains to be found.
NeRF-VPT: Learning Novel View Representations with Neural Radiance Fields via View Prompt Tuning
Mar 02, 2024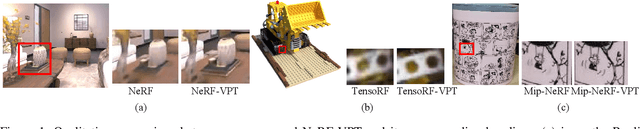
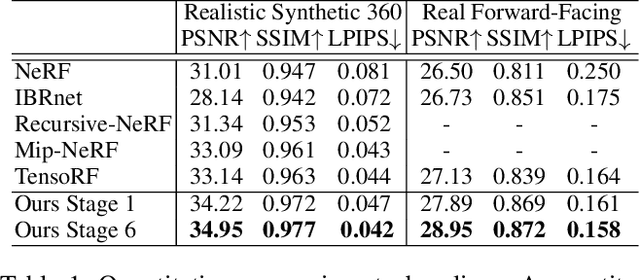
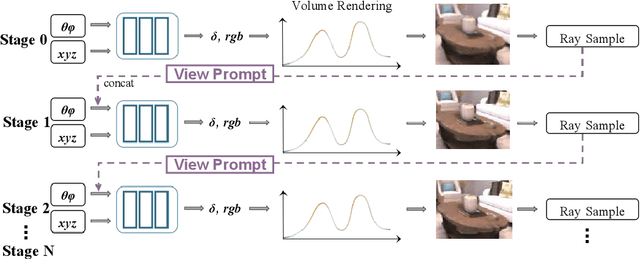
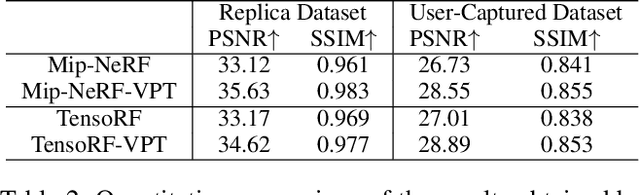
Neural Radiance Fields (NeRF) have garnered remarkable success in novel view synthesis. Nonetheless, the task of generating high-quality images for novel views persists as a critical challenge. While the existing efforts have exhibited commendable progress, capturing intricate details, enhancing textures, and achieving superior Peak Signal-to-Noise Ratio (PSNR) metrics warrant further focused attention and advancement. In this work, we propose NeRF-VPT, an innovative method for novel view synthesis to address these challenges. Our proposed NeRF-VPT employs a cascading view prompt tuning paradigm, wherein RGB information gained from preceding rendering outcomes serves as instructive visual prompts for subsequent rendering stages, with the aspiration that the prior knowledge embedded in the prompts can facilitate the gradual enhancement of rendered image quality. NeRF-VPT only requires sampling RGB data from previous stage renderings as priors at each training stage, without relying on extra guidance or complex techniques. Thus, our NeRF-VPT is plug-and-play and can be readily integrated into existing methods. By conducting comparative analyses of our NeRF-VPT against several NeRF-based approaches on demanding real-scene benchmarks, such as Realistic Synthetic 360, Real Forward-Facing, Replica dataset, and a user-captured dataset, we substantiate that our NeRF-VPT significantly elevates baseline performance and proficiently generates more high-quality novel view images than all the compared state-of-the-art methods. Furthermore, the cascading learning of NeRF-VPT introduces adaptability to scenarios with sparse inputs, resulting in a significant enhancement of accuracy for sparse-view novel view synthesis. The source code and dataset are available at \url{https://github.com/Freedomcls/NeRF-VPT}.
Placing Objects in Context via Inpainting for Out-of-distribution Segmentation
Feb 26, 2024When deploying a semantic segmentation model into the real world, it will inevitably be confronted with semantic classes unseen during training. Thus, to safely deploy such systems, it is crucial to accurately evaluate and improve their anomaly segmentation capabilities. However, acquiring and labelling semantic segmentation data is expensive and unanticipated conditions are long-tail and potentially hazardous. Indeed, existing anomaly segmentation datasets capture a limited number of anomalies, lack realism or have strong domain shifts. In this paper, we propose the Placing Objects in Context (POC) pipeline to realistically add any object into any image via diffusion models. POC can be used to easily extend any dataset with an arbitrary number of objects. In our experiments, we present different anomaly segmentation datasets based on POC-generated data and show that POC can improve the performance of recent state-of-the-art anomaly fine-tuning methods in several standardized benchmarks. POC is also effective to learn new classes. For example, we use it to edit Cityscapes samples by adding a subset of Pascal classes and show that models trained on such data achieve comparable performance to the Pascal-trained baseline. This corroborates the low sim-to-real gap of models trained on POC-generated images.
Prompting a Pretrained Transformer Can Be a Universal Approximator
Feb 22, 2024Despite the widespread adoption of prompting, prompt tuning and prefix-tuning of transformer models, our theoretical understanding of these fine-tuning methods remains limited. A key question is whether one can arbitrarily modify the behavior of pretrained model by prompting or prefix-tuning it. Formally, whether prompting and prefix-tuning a pretrained model can universally approximate sequence-to-sequence functions. This paper answers in the affirmative and demonstrates that much smaller pretrained models than previously thought can be universal approximators when prefixed. In fact, the attention mechanism is uniquely suited for universal approximation with prefix-tuning a single attention head being sufficient to approximate any continuous function. Moreover, any sequence-to-sequence function can be approximated by prefixing a transformer with depth linear in the sequence length. Beyond these density-type results, we also offer Jackson-type bounds on the length of the prefix needed to approximate a function to a desired precision.
Self-consistent Validation for Machine Learning Electronic Structure
Feb 15, 2024Machine learning has emerged as a significant approach to efficiently tackle electronic structure problems. Despite its potential, there is less guarantee for the model to generalize to unseen data that hinders its application in real-world scenarios. To address this issue, a technique has been proposed to estimate the accuracy of the predictions. This method integrates machine learning with self-consistent field methods to achieve both low validation cost and interpret-ability. This, in turn, enables exploration of the model's ability with active learning and instills confidence in its integration into real-world studies.
RanDumb: A Simple Approach that Questions the Efficacy of Continual Representation Learning
Feb 13, 2024We propose RanDumb to examine the efficacy of continual representation learning. RanDumb embeds raw pixels using a fixed random transform which approximates an RBF-Kernel, initialized before seeing any data, and learns a simple linear classifier on top. We present a surprising and consistent finding: RanDumb significantly outperforms the continually learned representations using deep networks across numerous continual learning benchmarks, demonstrating the poor performance of representation learning in these scenarios. RanDumb stores no exemplars and performs a single pass over the data, processing one sample at a time. It complements GDumb, operating in a low-exemplar regime where GDumb has especially poor performance. We reach the same consistent conclusions when RanDumb is extended to scenarios with pretrained models replacing the random transform with pretrained feature extractor. Our investigation is both surprising and alarming as it questions our understanding of how to effectively design and train models that require efficient continual representation learning, and necessitates a principled reinvestigation of the widely explored problem formulation itself. Our code is available at https://github.com/drimpossible/RanDumb.
Revealing Decurve Flows for Generalized Graph Propagation
Feb 13, 2024This study addresses the limitations of the traditional analysis of message-passing, central to graph learning, by defining {\em \textbf{generalized propagation}} with directed and weighted graphs. The significance manifest in two ways. \textbf{Firstly}, we propose {\em Generalized Propagation Neural Networks} (\textbf{GPNNs}), a framework that unifies most propagation-based graph neural networks. By generating directed-weighted propagation graphs with adjacency function and connectivity function, GPNNs offer enhanced insights into attention mechanisms across various graph models. We delve into the trade-offs within the design space with empirical experiments and emphasize the crucial role of the adjacency function for model expressivity via theoretical analysis. \textbf{Secondly}, we propose the {\em Continuous Unified Ricci Curvature} (\textbf{CURC}), an extension of celebrated {\em Ollivier-Ricci Curvature} for directed and weighted graphs. Theoretically, we demonstrate that CURC possesses continuity, scale invariance, and a lower bound connection with the Dirichlet isoperimetric constant validating bottleneck analysis for GPNNs. We include a preliminary exploration of learned propagation patterns in datasets, a first in the field. We observe an intriguing ``{\em \textbf{decurve flow}}'' - a curvature reduction during training for models with learnable propagation, revealing the evolution of propagation over time and a deeper connection to over-smoothing and bottleneck trade-off.
Secret Collusion Among Generative AI Agents
Feb 12, 2024Recent capability increases in large language models (LLMs) open up applications in which teams of communicating generative AI agents solve joint tasks. This poses privacy and security challenges concerning the unauthorised sharing of information, or other unwanted forms of agent coordination. Modern steganographic techniques could render such dynamics hard to detect. In this paper, we comprehensively formalise the problem of secret collusion in systems of generative AI agents by drawing on relevant concepts from both the AI and security literature. We study incentives for the use of steganography, and propose a variety of mitigation measures. Our investigations result in a model evaluation framework that systematically tests capabilities required for various forms of secret collusion. We provide extensive empirical results across a range of contemporary LLMs. While the steganographic capabilities of current models remain limited, GPT-4 displays a capability jump suggesting the need for continuous monitoring of steganographic frontier model capabilities. We conclude by laying out a comprehensive research program to mitigate future risks of collusion between generative AI models.
From Categories to Classifier: Name-Only Continual Learning by Exploring the Web
Nov 19, 2023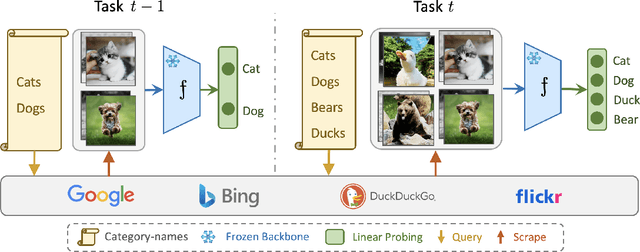
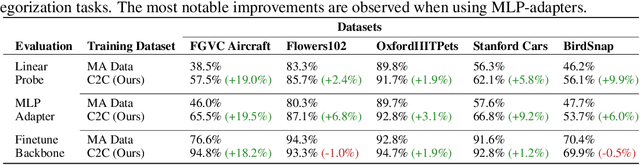
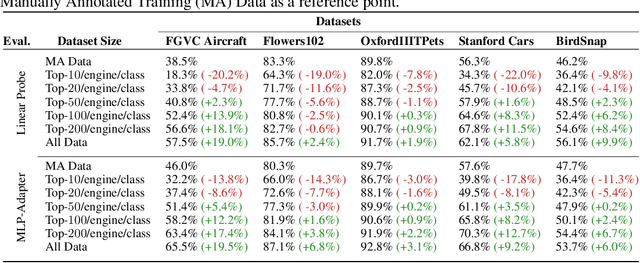
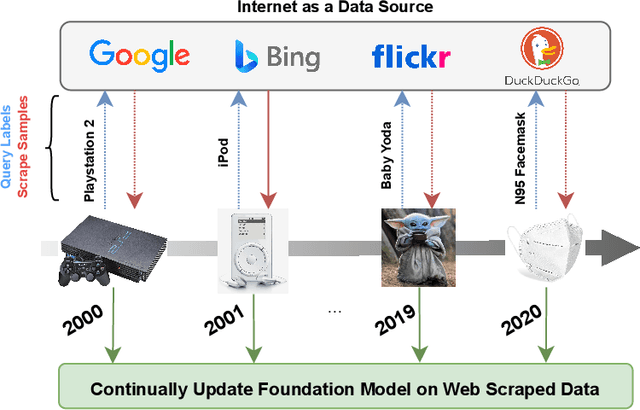
Continual Learning (CL) often relies on the availability of extensive annotated datasets, an assumption that is unrealistically time-consuming and costly in practice. We explore a novel paradigm termed name-only continual learning where time and cost constraints prohibit manual annotation. In this scenario, learners adapt to new category shifts using only category names without the luxury of annotated training data. Our proposed solution leverages the expansive and ever-evolving internet to query and download uncurated webly-supervised data for image classification. We investigate the reliability of our web data and find them comparable, and in some cases superior, to manually annotated datasets. Additionally, we show that by harnessing the web, we can create support sets that surpass state-of-the-art name-only classification that create support sets using generative models or image retrieval from LAION-5B, achieving up to 25% boost in accuracy. When applied across varied continual learning contexts, our method consistently exhibits a small performance gap in comparison to models trained on manually annotated datasets. We present EvoTrends, a class-incremental dataset made from the web to capture real-world trends, created in just minutes. Overall, this paper underscores the potential of using uncurated webly-supervised data to mitigate the challenges associated with manual data labeling in continual learning.