 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShuai Liao
Motion-Guided Masking for Spatiotemporal Representation Learning
Aug 24, 2023
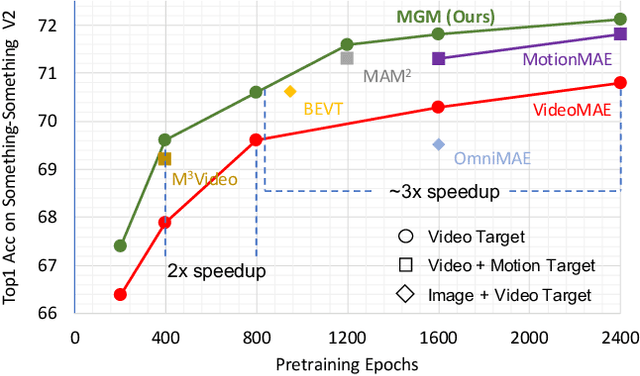
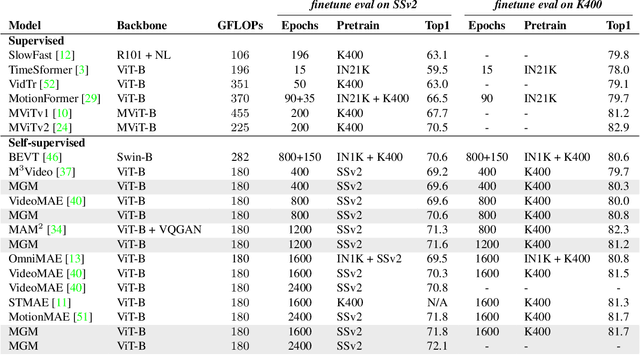
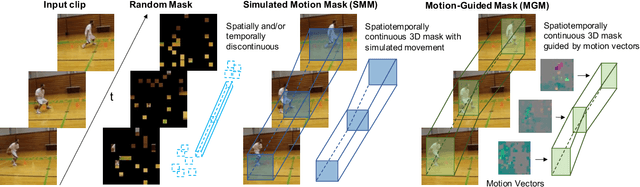
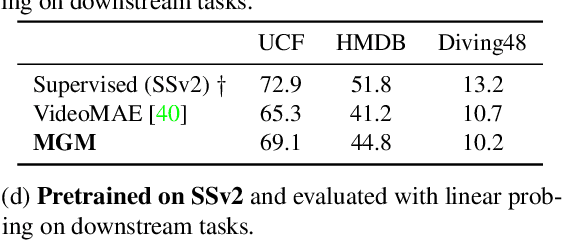
Several recent works have directly extended the image masked autoencoder (MAE) with random masking into video domain, achieving promising results. However, unlike images, both spatial and temporal information are important for video understanding. This suggests that the random masking strategy that is inherited from the image MAE is less effective for video MAE. This motivates the design of a novel masking algorithm that can more efficiently make use of video saliency. Specifically, we propose a motion-guided masking algorithm (MGM) which leverages motion vectors to guide the position of each mask over time. Crucially, these motion-based correspondences can be directly obtained from information stored in the compressed format of the video, which makes our method efficient and scalable. On two challenging large-scale video benchmarks (Kinetics-400 and Something-Something V2), we equip video MAE with our MGM and achieve up to +$1.3\%$ improvement compared to previous state-of-the-art methods. Additionally, our MGM achieves equivalent performance to previous video MAE using up to $66\%$ fewer training epochs. Lastly, we show that MGM generalizes better to downstream transfer learning and domain adaptation tasks on the UCF101, HMDB51, and Diving48 datasets, achieving up to +$4.9\%$ improvement compared to baseline methods.
Spherical Regression: Learning Viewpoints, Surface Normals and 3D Rotations on n-Spheres
Apr 10, 2019



Many computer vision challenges require continuous outputs, but tend to be solved by discrete classification. The reason is classification's natural containment within a probability $n$-simplex, as defined by the popular softmax activation function. Regular regression lacks such a closed geometry, leading to unstable training and convergence to suboptimal local minima. Starting from this insight we revisit regression in convolutional neural networks. We observe many continuous output problems in computer vision are naturally contained in closed geometrical manifolds, like the Euler angles in viewpoint estimation or the normals in surface normal estimation. A natural framework for posing such continuous output problems are $n$-spheres, which are naturally closed geometric manifolds defined in the $\mathbb{R}^{(n+1)}$ space. By introducing a spherical exponential mapping on $n$-spheres at the regression output, we obtain well-behaved gradients, leading to stable training. We show how our spherical regression can be utilized for several computer vision challenges, specifically viewpoint estimation, surface normal estimation and 3D rotation estimation. For all these problems our experiments demonstrate the benefit of spherical regression. All paper resources are available at https://github.com/leoshine/Spherical_Regression.