 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeng Fu
DeNoising-MOT: Towards Multiple Object Tracking with Severe Occlusions
Sep 09, 2023
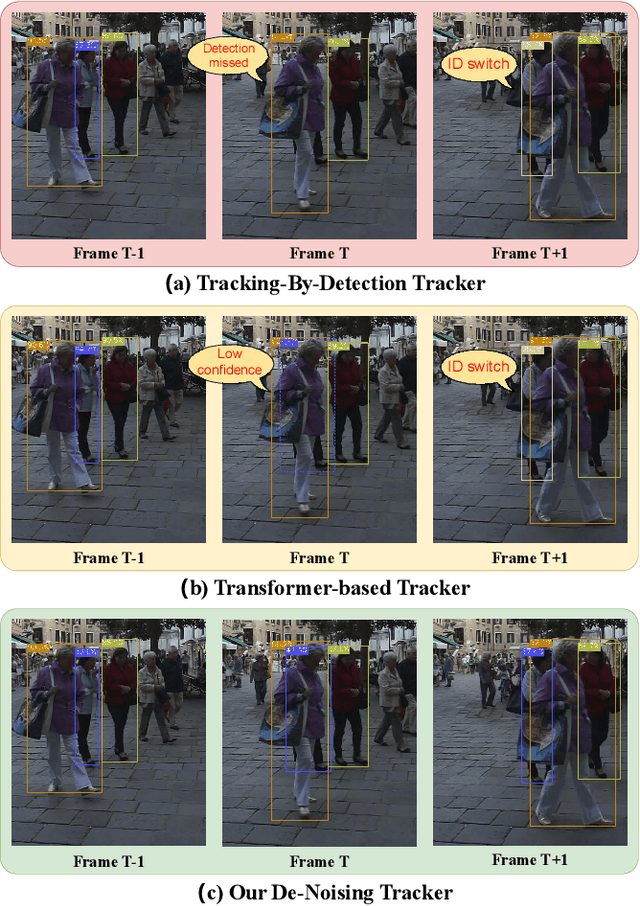
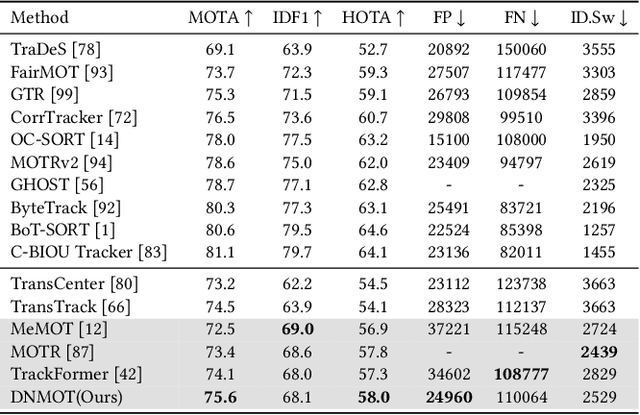
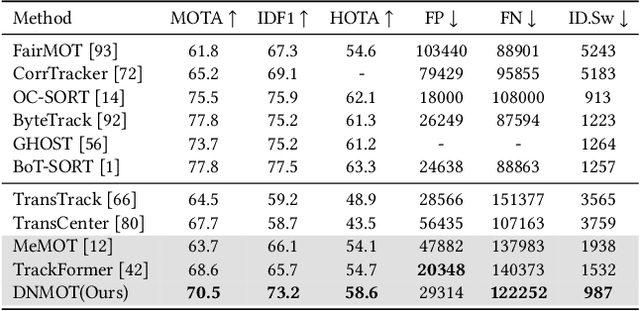
Multiple object tracking (MOT) tends to become more challenging when severe occlusions occur. In this paper, we analyze the limitations of traditional Convolutional Neural Network-based methods and Transformer-based methods in handling occlusions and propose DNMOT, an end-to-end trainable DeNoising Transformer for MOT. To address the challenge of occlusions, we explicitly simulate the scenarios when occlusions occur. Specifically, we augment the trajectory with noises during training and make our model learn the denoising process in an encoder-decoder architecture, so that our model can exhibit strong robustness and perform well under crowded scenes. Additionally, we propose a Cascaded Mask strategy to better coordinate the interaction between different types of queries in the decoder to prevent the mutual suppression between neighboring trajectories under crowded scenes. Notably, the proposed method requires no additional modules like matching strategy and motion state estimation in inference. We conduct extensive experiments on the MOT17, MOT20, and DanceTrack datasets, and the experimental results show that our method outperforms previous state-of-the-art methods by a clear margin.
Mismatched estimation of non-symmetric rank-one matrices corrupted by structured noise
Feb 08, 2023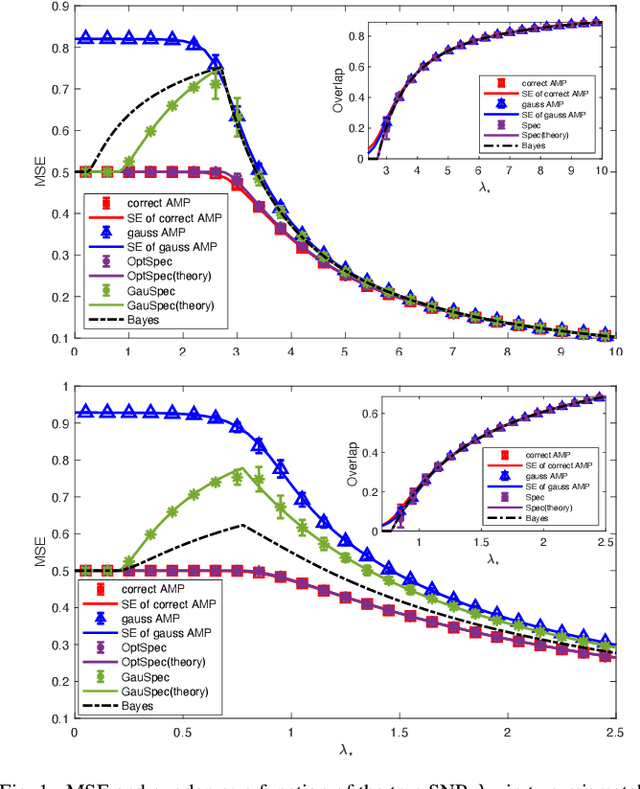
We study the performance of a Bayesian statistician who estimates a rank-one signal corrupted by non-symmetric rotationally invariant noise with a generic distribution of singular values. As the signal-to-noise ratio and the noise structure are unknown, a Gaussian setup is incorrectly assumed. We derive the exact analytic expression for the error of the mismatched Bayes estimator and also provide the analysis of an approximate message passing (AMP) algorithm. The first result exploits the asymptotic behavior of spherical integrals for rectangular matrices and of low-rank matrix perturbations; the second one relies on the design and analysis of an auxiliary AMP. The numerical experiments show that there is a performance gap between the AMP and Bayes estimators, which is due to the incorrect estimation of the signal norm.