 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWenjun Huang
EcoSense: Energy-Efficient Intelligent Sensing for In-Shore Ship Detection through Edge-Cloud Collaboration
Mar 26, 2024
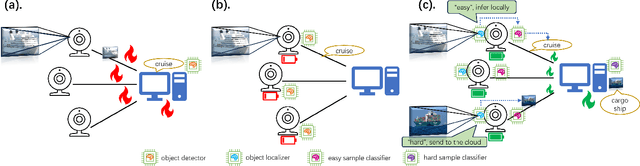


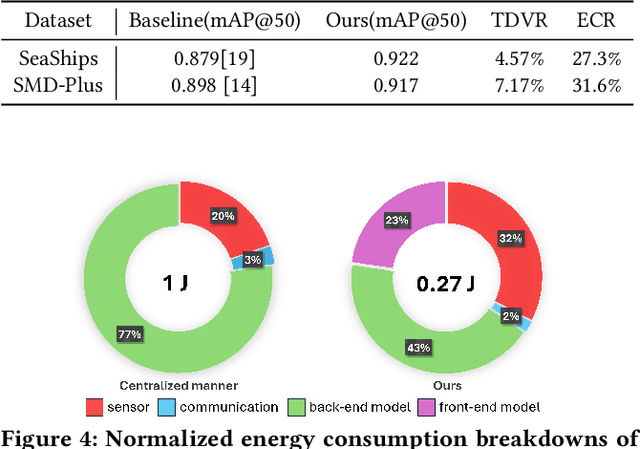
Detecting marine objects inshore presents challenges owing to algorithmic intricacies and complexities in system deployment. We propose a difficulty-aware edge-cloud collaborative sensing system that splits the task into object localization and fine-grained classification. Objects are classified either at the edge or within the cloud, based on their estimated difficulty. The framework comprises a low-power device-tailored front-end model for object localization, classification, and difficulty estimation, along with a transformer-graph convolutional network-based back-end model for fine-grained classification. Our system demonstrates superior performance (mAP@0.5 +4.3%}) on widely used marine object detection datasets, significantly reducing both data transmission volume (by 95.43%) and energy consumption (by 72.7%}) at the system level. We validate the proposed system across various embedded system platforms and in real-world scenarios involving drone deployment.
TaskCLIP: Extend Large Vision-Language Model for Task Oriented Object Detection
Mar 12, 2024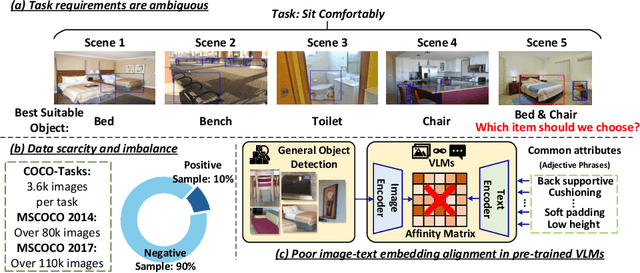

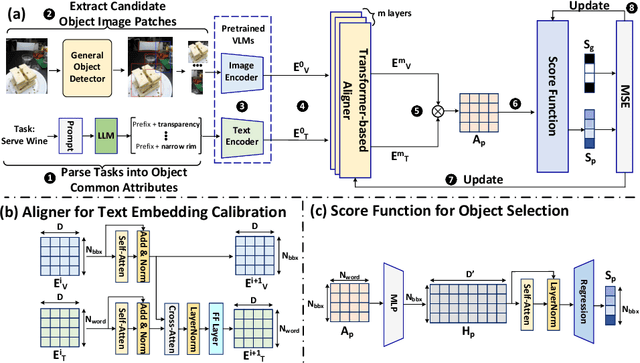

Task-oriented object detection aims to find objects suitable for accomplishing specific tasks. As a challenging task, it requires simultaneous visual data processing and reasoning under ambiguous semantics. Recent solutions are mainly all-in-one models. However, the object detection backbones are pre-trained without text supervision. Thus, to incorporate task requirements, their intricate models undergo extensive learning on a highly imbalanced and scarce dataset, resulting in capped performance, laborious training, and poor generalizability. In contrast, we propose TaskCLIP, a more natural two-stage design composed of general object detection and task-guided object selection. Particularly for the latter, we resort to the recently successful large Vision-Language Models (VLMs) as our backbone, which provides rich semantic knowledge and a uniform embedding space for images and texts. Nevertheless, the naive application of VLMs leads to sub-optimal quality, due to the misalignment between embeddings of object images and their visual attributes, which are mainly adjective phrases. To this end, we design a transformer-based aligner after the pre-trained VLMs to re-calibrate both embeddings. Finally, we employ a trainable score function to post-process the VLM matching results for object selection. Experimental results demonstrate that our TaskCLIP outperforms the state-of-the-art DETR-based model TOIST by 3.5% and only requires a single NVIDIA RTX 4090 for both training and inference.
HEAL: Brain-inspired Hyperdimensional Efficient Active Learning
Feb 17, 2024Drawing inspiration from the outstanding learning capability of our human brains, Hyperdimensional Computing (HDC) emerges as a novel computing paradigm, and it leverages high-dimensional vector presentation and operations for brain-like lightweight Machine Learning (ML). Practical deployments of HDC have significantly enhanced the learning efficiency compared to current deep ML methods on a broad spectrum of applications. However, boosting the data efficiency of HDC classifiers in supervised learning remains an open question. In this paper, we introduce Hyperdimensional Efficient Active Learning (HEAL), a novel Active Learning (AL) framework tailored for HDC classification. HEAL proactively annotates unlabeled data points via uncertainty and diversity-guided acquisition, leading to a more efficient dataset annotation and lowering labor costs. Unlike conventional AL methods that only support classifiers built upon deep neural networks (DNN), HEAL operates without the need for gradient or probabilistic computations. This allows it to be effortlessly integrated with any existing HDC classifier architecture. The key design of HEAL is a novel approach for uncertainty estimation in HDC classifiers through a lightweight HDC ensemble with prior hypervectors. Additionally, by exploiting hypervectors as prototypes (i.e., compact representations), we develop an extra metric for HEAL to select diverse samples within each batch for annotation. Our evaluation shows that HEAL surpasses a diverse set of baselines in AL quality and achieves notably faster acquisition than many BNN-powered or diversity-guided AL methods, recording 11 times to 40,000 times speedup in acquisition runtime per batch.
A Plug-in Tiny AI Module for Intelligent and Selective Sensor Data Transmission
Feb 03, 2024Applications in the Internet of Things (IoT) utilize machine learning to analyze sensor-generated data. However, a major challenge lies in the lack of targeted intelligence in current sensing systems, leading to vast data generation and increased computational and communication costs. To address this challenge, we propose a novel sensing module to equip sensing frameworks with intelligent data transmission capabilities by integrating a highly efficient machine learning model placed near the sensor. This model provides prompt feedback for the sensing system to transmit only valuable data while discarding irrelevant information by regulating the frequency of data transmission. The near-sensor model is quantized and optimized for real-time sensor control. To enhance the framework's performance, the training process is customized and a "lazy" sensor deactivation strategy utilizing temporal information is introduced. The suggested method is orthogonal to other IoT frameworks and can be considered as a plugin for selective data transmission. The framework is implemented, encompassing both software and hardware components. The experiments demonstrate that the framework utilizing the suggested module achieves over 85% system efficiency in terms of energy consumption and storage, with negligible impact on performance. This methodology has the potential to significantly reduce data output from sensors, benefiting a wide range of IoT applications.
Practical Probabilistic Model-based Deep Reinforcement Learning by Integrating Dropout Uncertainty and Trajectory Sampling
Sep 20, 2023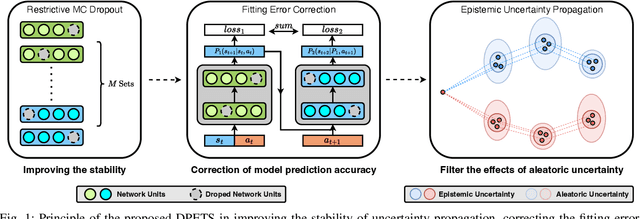
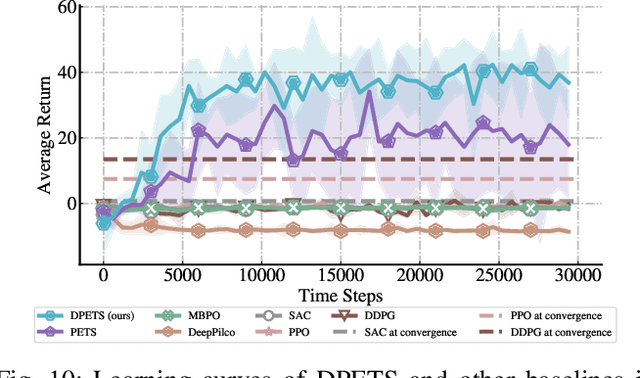
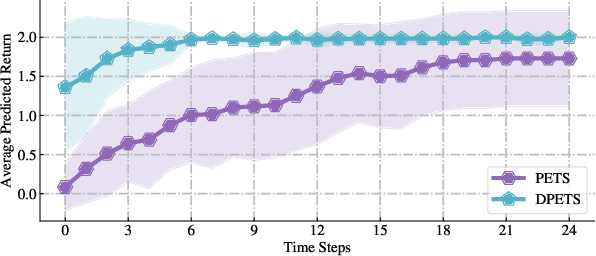
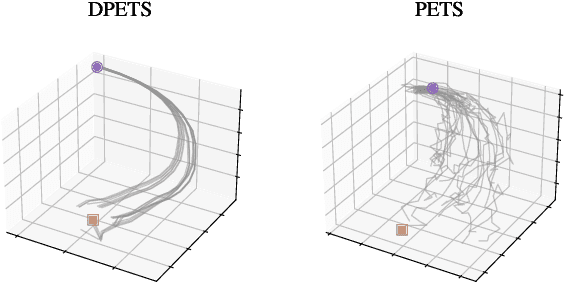
This paper addresses the prediction stability, prediction accuracy and control capability of the current probabilistic model-based reinforcement learning (MBRL) built on neural networks. A novel approach dropout-based probabilistic ensembles with trajectory sampling (DPETS) is proposed where the system uncertainty is stably predicted by combining the Monte-Carlo dropout and trajectory sampling in one framework. Its loss function is designed to correct the fitting error of neural networks for more accurate prediction of probabilistic models. The state propagation in its policy is extended to filter the aleatoric uncertainty for superior control capability. Evaluated by several Mujoco benchmark control tasks under additional disturbances and one practical robot arm manipulation task, DPETS outperforms related MBRL approaches in both average return and convergence velocity while achieving superior performance than well-known model-free baselines with significant sample efficiency. The open source code of DPETS is available at https://github.com/mrjun123/DPETS.
Sea Ice Extraction via Remote Sensed Imagery: Algorithms, Datasets, Applications and Challenges
Jun 01, 2023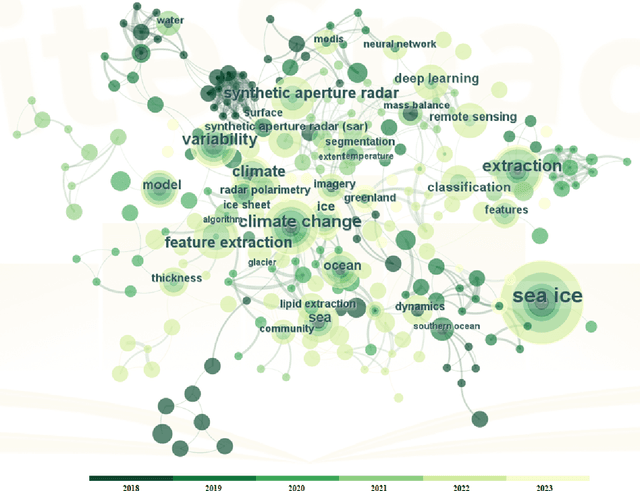
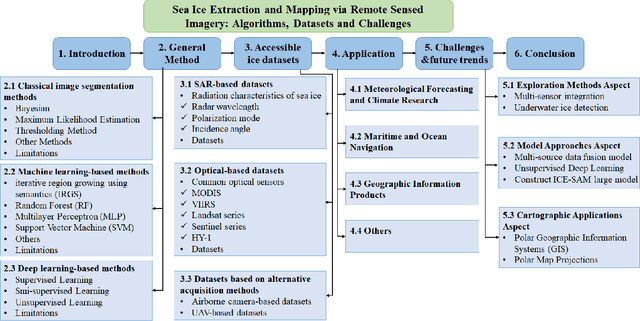
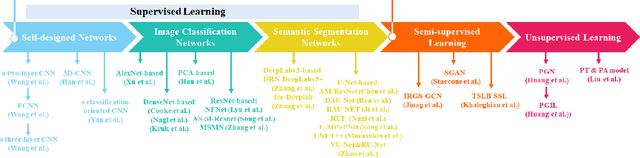
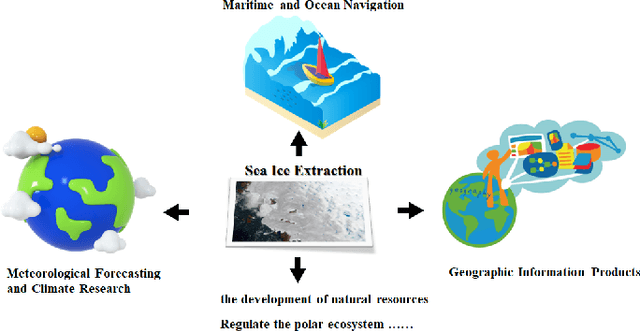
The deep learning, which is a dominating technique in artificial intelligence, has completely changed the image understanding over the past decade. As a consequence, the sea ice extraction (SIE) problem has reached a new era. We present a comprehensive review of four important aspects of SIE, including algorithms, datasets, applications, and the future trends. Our review focuses on researches published from 2016 to the present, with a specific focus on deep learning-based approaches in the last five years. We divided all relegated algorithms into 3 categories, including classical image segmentation approach, machine learning-based approach and deep learning-based methods. We reviewed the accessible ice datasets including SAR-based datasets, the optical-based datasets and others. The applications are presented in 4 aspects including climate research, navigation, geographic information systems (GIS) production and others. It also provides insightful observations and inspiring future research directions.
DAMS-LIO: A Degeneration-Aware and Modular Sensor-Fusion LiDAR-inertial Odometry
Feb 08, 2023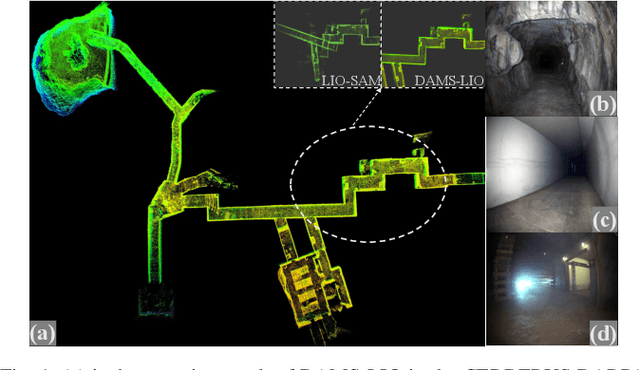
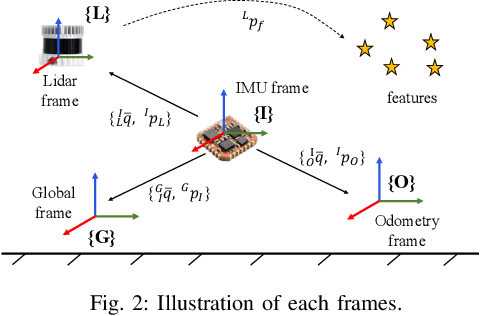
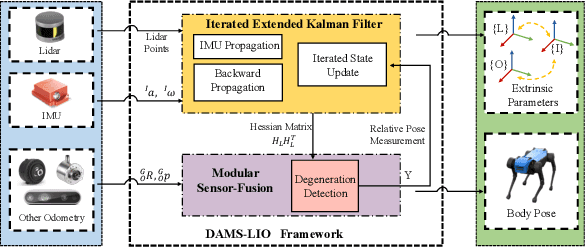
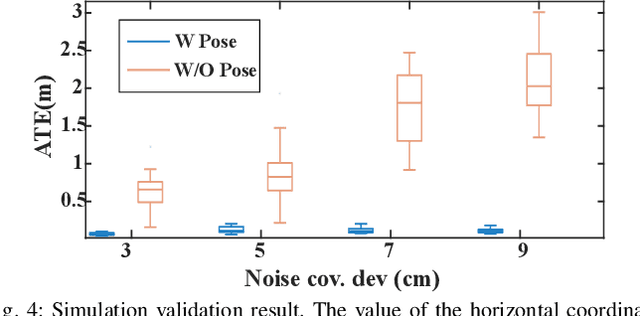
The fusion scheme is crucial to the multi-sensor fusion method that is the promising solution to the state estimation in complex and extreme environments like underground mines and planetary surfaces. In this work, a light-weight iEKF-based LiDAR-inertial odometry system is presented, which utilizes a degeneration-aware and modular sensor-fusion pipeline that takes both LiDAR points and relative pose from another odometry as the measurement in the update process only when degeneration is detected. Both the CRLB theory and simulation test are used to demonstrate the higher accuracy of our method compared to methods using a single observation. Furthermore, the proposed system is evaluated in perceptually challenging datasets against various state-of-the-art sensor-fusion methods. The results show that the proposed system achieves real-time and high estimation accuracy performance despite the challenging environment and poor observations.