 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYangchen Pan
An MRP Formulation for Supervised Learning: Generalized Temporal Difference Learning Models
Apr 23, 2024
In traditional statistical learning, data points are usually assumed to be independently and identically distributed (i.i.d.) following an unknown probability distribution. This paper presents a contrasting viewpoint, perceiving data points as interconnected and employing a Markov reward process (MRP) for data modeling. We reformulate the typical supervised learning as an on-policy policy evaluation problem within reinforcement learning (RL), introducing a generalized temporal difference (TD) learning algorithm as a resolution. Theoretically, our analysis draws connections between the solutions of linear TD learning and ordinary least squares (OLS). We also show that under specific conditions, particularly when noises are correlated, the TD's solution proves to be a more effective estimator than OLS. Furthermore, we establish the convergence of our generalized TD algorithms under linear function approximation. Empirical studies verify our theoretical results, examine the vital design of our TD algorithm and show practical utility across various datasets, encompassing tasks such as regression and image classification with deep learning.
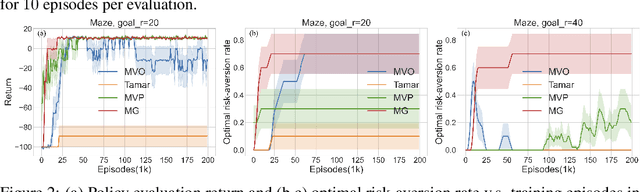
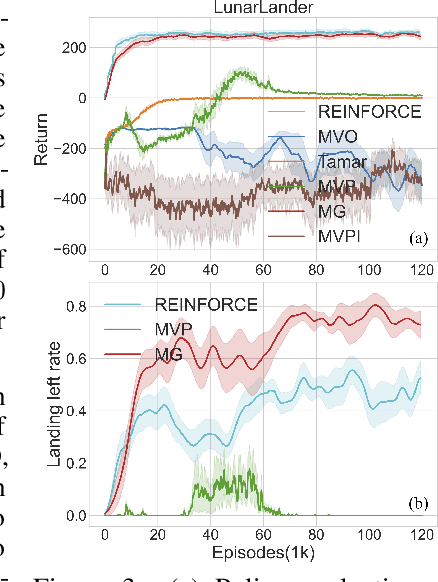
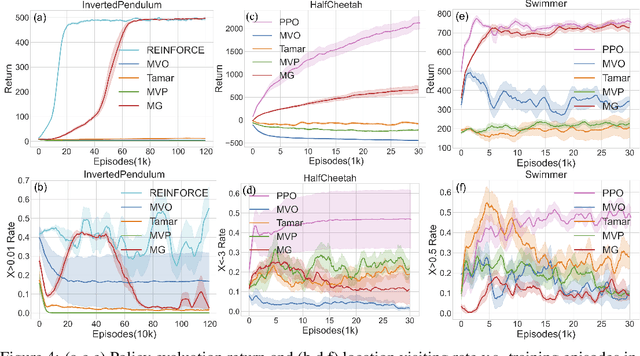
A Simple Mixture Policy Parameterization for Improving Sample Efficiency of CVaR Optimization
Mar 20, 2024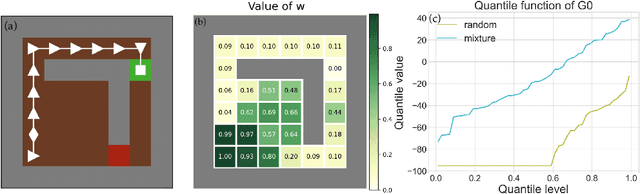
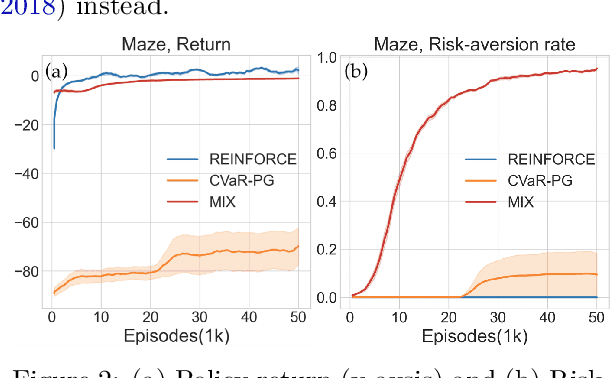
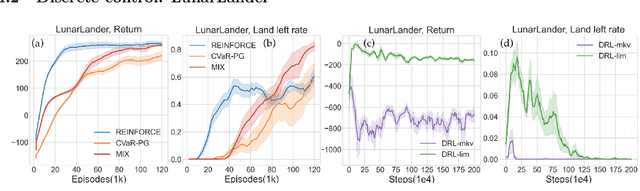
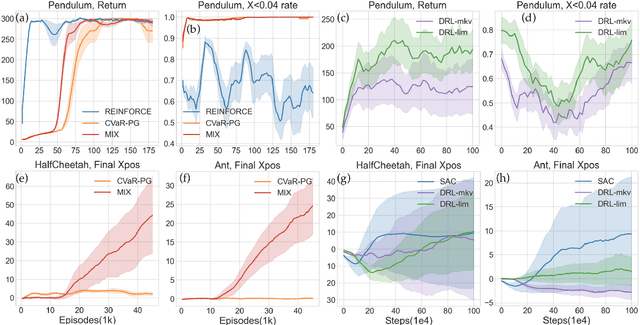
Reinforcement learning algorithms utilizing policy gradients (PG) to optimize Conditional Value at Risk (CVaR) face significant challenges with sample inefficiency, hindering their practical applications. This inefficiency stems from two main facts: a focus on tail-end performance that overlooks many sampled trajectories, and the potential of gradient vanishing when the lower tail of the return distribution is overly flat. To address these challenges, we propose a simple mixture policy parameterization. This method integrates a risk-neutral policy with an adjustable policy to form a risk-averse policy. By employing this strategy, all collected trajectories can be utilized for policy updating, and the issue of vanishing gradients is counteracted by stimulating higher returns through the risk-neutral component, thus lifting the tail and preventing flatness. Our empirical study reveals that this mixture parameterization is uniquely effective across a variety of benchmark domains. Specifically, it excels in identifying risk-averse CVaR policies in some Mujoco environments where the traditional CVaR-PG fails to learn a reasonable policy.
Improving Adversarial Transferability via Model Alignment
Nov 30, 2023Neural networks are susceptible to adversarial perturbations that are transferable across different models. In this paper, we introduce a novel model alignment technique aimed at improving a given source model's ability in generating transferable adversarial perturbations. During the alignment process, the parameters of the source model are fine-tuned to minimize an alignment loss. This loss measures the divergence in the predictions between the source model and another, independently trained model, referred to as the witness model. To understand the effect of model alignment, we conduct a geometric anlaysis of the resulting changes in the loss landscape. Extensive experiments on the ImageNet dataset, using a variety of model architectures, demonstrate that perturbations generated from aligned source models exhibit significantly higher transferability than those from the original source model.
Understanding the robustness difference between stochastic gradient descent and adaptive gradient methods
Aug 13, 2023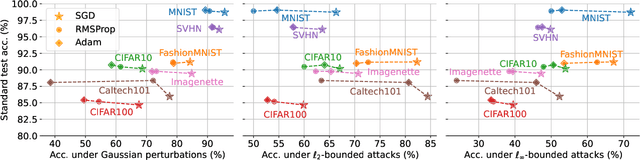
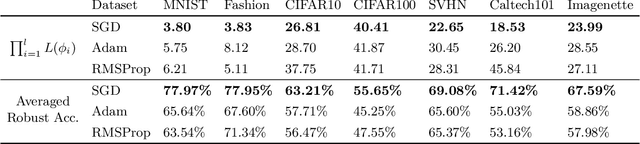
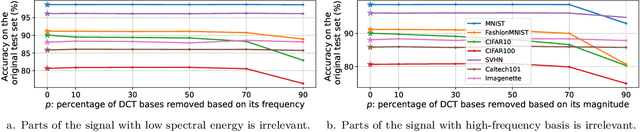

Stochastic gradient descent (SGD) and adaptive gradient methods, such as Adam and RMSProp, have been widely used in training deep neural networks. We empirically show that while the difference between the standard generalization performance of models trained using these methods is small, those trained using SGD exhibit far greater robustness under input perturbations. Notably, our investigation demonstrates the presence of irrelevant frequencies in natural datasets, where alterations do not affect models' generalization performance. However, models trained with adaptive methods show sensitivity to these changes, suggesting that their use of irrelevant frequencies can lead to solutions sensitive to perturbations. To better understand this difference, we study the learning dynamics of gradient descent (GD) and sign gradient descent (signGD) on a synthetic dataset that mirrors natural signals. With a three-dimensional input space, the models optimized with GD and signGD have standard risks close to zero but vary in their adversarial risks. Our result shows that linear models' robustness to $\ell_2$-norm bounded changes is inversely proportional to the model parameters' weight norm: a smaller weight norm implies better robustness. In the context of deep learning, our experiments show that SGD-trained neural networks show smaller Lipschitz constants, explaining the better robustness to input perturbations than those trained with adaptive gradient methods.
An Alternative to Variance: Gini Deviation for Risk-averse Policy Gradient
Aug 09, 2023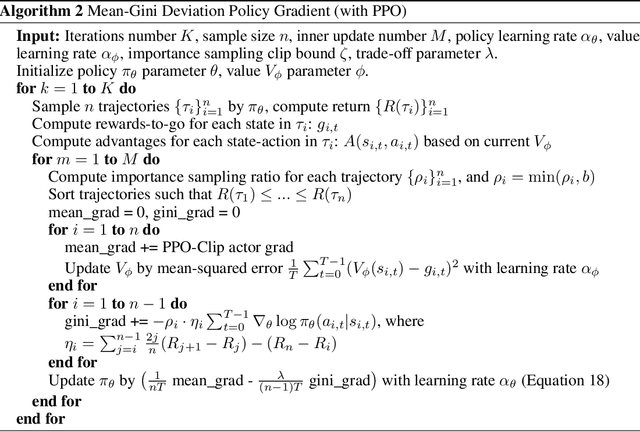
Restricting the variance of a policy's return is a popular choice in risk-averse Reinforcement Learning (RL) due to its clear mathematical definition and easy interpretability. Traditional methods directly restrict the total return variance. Recent methods restrict the per-step reward variance as a proxy. We thoroughly examine the limitations of these variance-based methods, such as sensitivity to numerical scale and hindering of policy learning, and propose to use an alternative risk measure, Gini deviation, as a substitute. We study various properties of this new risk measure and derive a policy gradient algorithm to minimize it. Empirical evaluation in domains where risk-aversion can be clearly defined, shows that our algorithm can mitigate the limitations of variance-based risk measures and achieves high return with low risk in terms of variance and Gini deviation when others fail to learn a reasonable policy.
Conditionally Optimistic Exploration for Cooperative Deep Multi-Agent Reinforcement Learning
Mar 16, 2023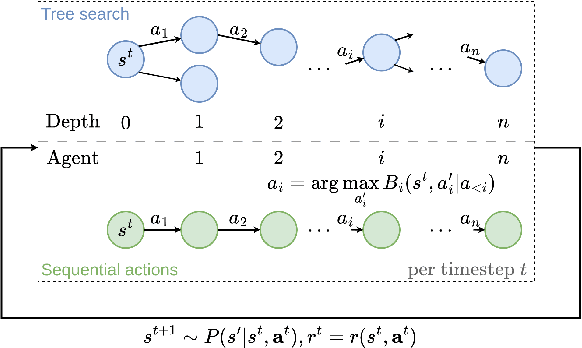


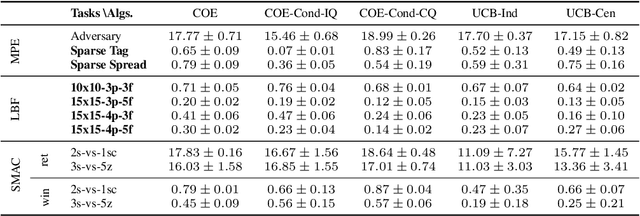
Efficient exploration is critical in cooperative deep Multi-Agent Reinforcement Learning (MARL). In this paper, we propose an exploration method that efficiently encourages cooperative exploration based on the idea of the theoretically justified tree search algorithm UCT (Upper Confidence bounds applied to Trees). The high-level intuition is that to perform optimism-based exploration, agents would achieve cooperative strategies if each agent's optimism estimate captures a structured dependency relationship with other agents. At each node (i.e., action) of the search tree, UCT performs optimism-based exploration using a bonus derived by conditioning on the visitation count of its parent node. We provide a perspective to view MARL as tree search iterations and develop a method called Conditionally Optimistic Exploration (COE). We assume agents take actions following a sequential order, and consider nodes at the same depth of the search tree as actions of one individual agent. COE computes each agent's state-action value estimate with an optimistic bonus derived from the visitation count of the state and joint actions taken by agents up to the current agent. COE is adaptable to any value decomposition method for centralized training with decentralized execution. Experiments across various cooperative MARL benchmarks show that COE outperforms current state-of-the-art exploration methods on hard-exploration tasks.
The In-Sample Softmax for Offline Reinforcement Learning
Feb 28, 2023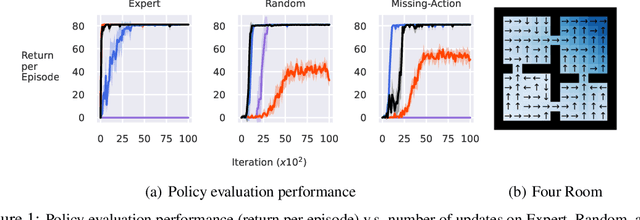
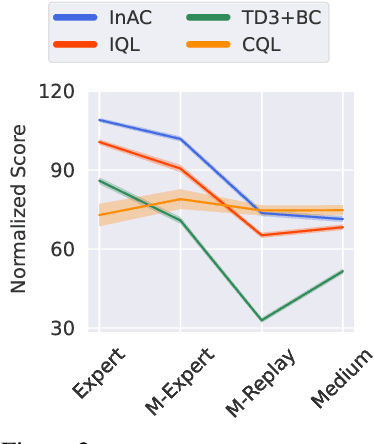
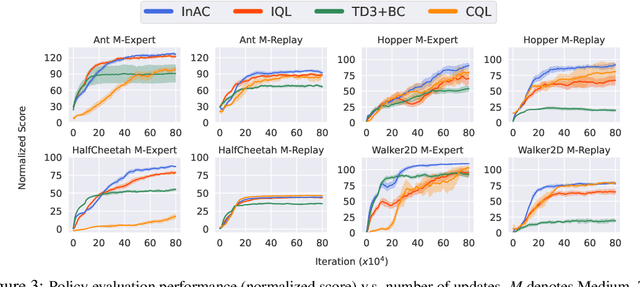
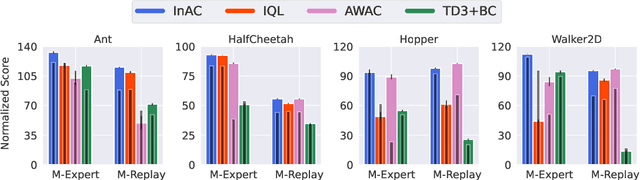
Reinforcement learning (RL) agents can leverage batches of previously collected data to extract a reasonable control policy. An emerging issue in this offline RL setting, however, is that the bootstrapping update underlying many of our methods suffers from insufficient action-coverage: standard max operator may select a maximal action that has not been seen in the dataset. Bootstrapping from these inaccurate values can lead to overestimation and even divergence. There are a growing number of methods that attempt to approximate an \emph{in-sample} max, that only uses actions well-covered by the dataset. We highlight a simple fact: it is more straightforward to approximate an in-sample \emph{softmax} using only actions in the dataset. We show that policy iteration based on the in-sample softmax converges, and that for decreasing temperatures it approaches the in-sample max. We derive an In-Sample Actor-Critic (AC), using this in-sample softmax, and show that it is consistently better or comparable to existing offline RL methods, and is also well-suited to fine-tuning.
Label Alignment Regularization for Distribution Shift
Nov 27, 2022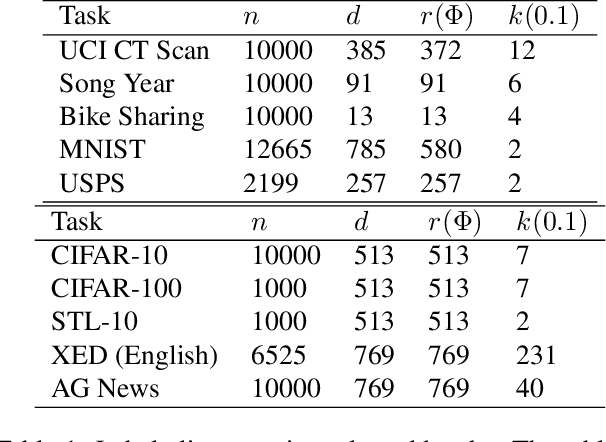
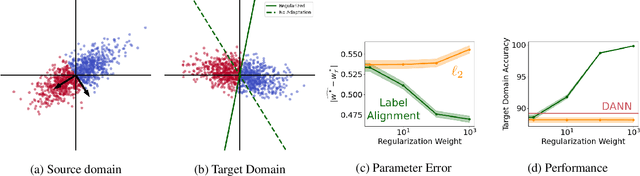
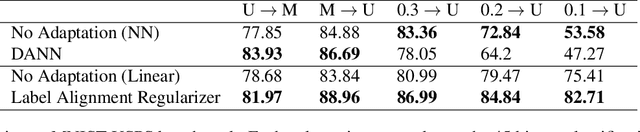

Recent work reported the label alignment property in a supervised learning setting: the vector of all labels in the dataset is mostly in the span of the top few singular vectors of the data matrix. Inspired by this observation, we derive a regularization method for unsupervised domain adaptation. Instead of regularizing representation learning as done by popular domain adaptation methods, we regularize the classifier so that the target domain predictions can to some extent ``align" with the top singular vectors of the unsupervised data matrix from the target domain. In a linear regression setting, we theoretically justify the label alignment property and characterize the optimality of the solution of our regularization by bounding its distance to the optimal solution. We conduct experiments to show that our method can work well on the label shift problems, where classic domain adaptation methods are known to fail. We also report mild improvement over domain adaptation baselines on a set of commonly seen MNIST-USPS domain adaptation tasks and on cross-lingual sentiment analysis tasks.
Memory-efficient Reinforcement Learning with Knowledge Consolidation
May 22, 2022

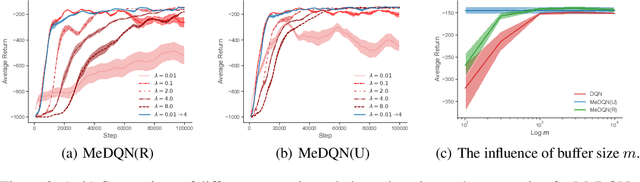

Artificial neural networks are promising as general function approximators but challenging to train on non-independent and identically distributed data due to catastrophic forgetting. Experience replay, a standard component in deep reinforcement learning, is often used to reduce forgetting and improve sample efficiency by storing experiences in a large buffer and using them for training later. However, a large replay buffer results in a heavy memory burden, especially for onboard and edge devices with limited memory capacities. We propose memory-efficient reinforcement learning algorithms based on the deep Q-network algorithm to alleviate this problem. Our algorithms reduce forgetting and maintain high sample efficiency by consolidating knowledge from the target Q-network to the current Q-network. Compared to baseline methods, our algorithms achieve comparable or better performance on both feature-based and image-based tasks while easing the burden of large experience replay buffers.
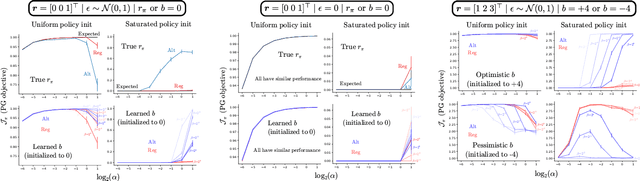
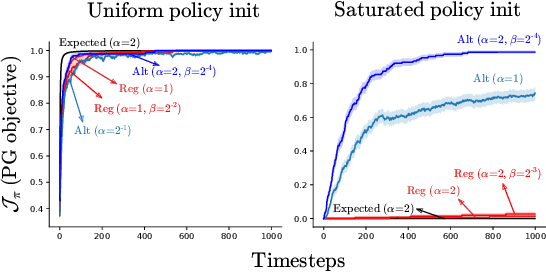
An Alternate Policy Gradient Estimator for Softmax Policies
Dec 22, 2021

Policy gradient (PG) estimators for softmax policies are ineffective with sub-optimally saturated initialization, which happens when the density concentrates on a sub-optimal action. Sub-optimal policy saturation may arise from bad policy initialization or sudden changes in the environment that occur after the policy has already converged, and softmax PG estimators require a large number of updates to recover an effective policy. This severe issue causes high sample inefficiency and poor adaptability to new situations. To mitigate this problem, we propose a novel policy gradient estimator for softmax policies that utilizes the bias in the critic estimate and the noise present in the reward signal to escape the saturated regions of the policy parameter space. Our analysis and experiments, conducted on bandits and classical MDP benchmarking tasks, show that our estimator is more robust to policy saturation.