 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeYichen Yao
HUNTER: Unsupervised Human-centric 3D Detection via Transferring Knowledge from Synthetic Instances to Real Scenes
Mar 15, 2024
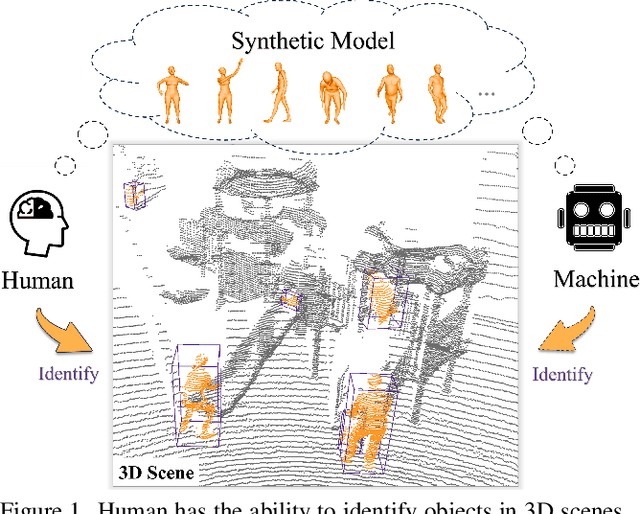

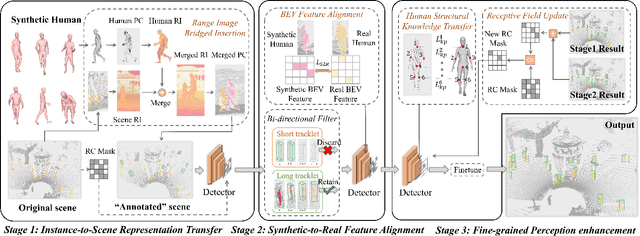

Human-centric 3D scene understanding has recently drawn increasing attention, driven by its critical impact on robotics. However, human-centric real-life scenarios are extremely diverse and complicated, and humans have intricate motions and interactions. With limited labeled data, supervised methods are difficult to generalize to general scenarios, hindering real-life applications. Mimicking human intelligence, we propose an unsupervised 3D detection method for human-centric scenarios by transferring the knowledge from synthetic human instances to real scenes. To bridge the gap between the distinct data representations and feature distributions of synthetic models and real point clouds, we introduce novel modules for effective instance-to-scene representation transfer and synthetic-to-real feature alignment. Remarkably, our method exhibits superior performance compared to current state-of-the-art techniques, achieving 87.8% improvement in mAP and closely approaching the performance of fully supervised methods (62.15 mAP vs. 69.02 mAP) on HuCenLife Dataset.
RealDex: Towards Human-like Grasping for Robotic Dexterous Hand
Feb 21, 2024In this paper, we introduce RealDex, a pioneering dataset capturing authentic dexterous hand grasping motions infused with human behavioral patterns, enriched by multi-view and multimodal visual data. Utilizing a teleoperation system, we seamlessly synchronize human-robot hand poses in real time. This collection of human-like motions is crucial for training dexterous hands to mimic human movements more naturally and precisely. RealDex holds immense promise in advancing humanoid robot for automated perception, cognition, and manipulation in real-world scenarios. Moreover, we introduce a cutting-edge dexterous grasping motion generation framework, which aligns with human experience and enhances real-world applicability through effectively utilizing Multimodal Large Language Models. Extensive experiments have demonstrated the superior performance of our method on RealDex and other open datasets. The complete dataset and code will be made available upon the publication of this work.
Human-centric Scene Understanding for 3D Large-scale Scenarios
Jul 26, 2023
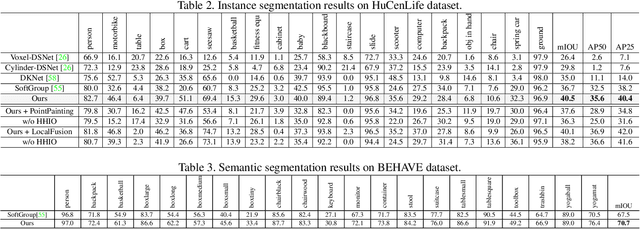
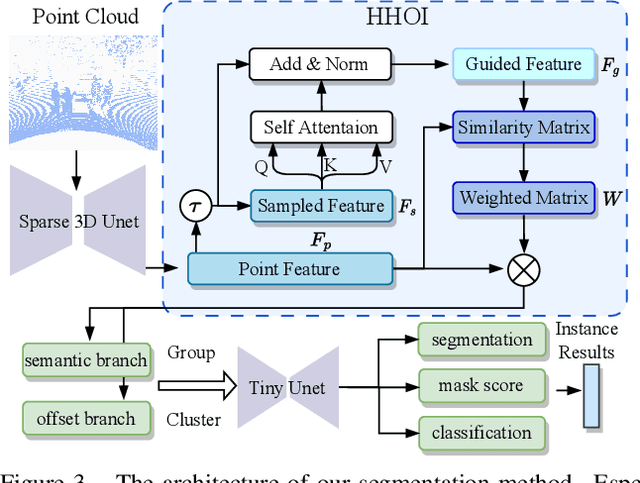
Human-centric scene understanding is significant for real-world applications, but it is extremely challenging due to the existence of diverse human poses and actions, complex human-environment interactions, severe occlusions in crowds, etc. In this paper, we present a large-scale multi-modal dataset for human-centric scene understanding, dubbed HuCenLife, which is collected in diverse daily-life scenarios with rich and fine-grained annotations. Our HuCenLife can benefit many 3D perception tasks, such as segmentation, detection, action recognition, etc., and we also provide benchmarks for these tasks to facilitate related research. In addition, we design novel modules for LiDAR-based segmentation and action recognition, which are more applicable for large-scale human-centric scenarios and achieve state-of-the-art performance.
Can Sophisticated Dispatching Strategy Acquired by Reinforcement Learning? - A Case Study in Dynamic Courier Dispatching System
Mar 07, 2019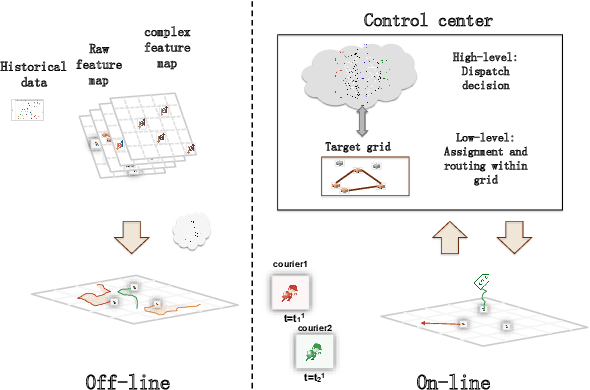
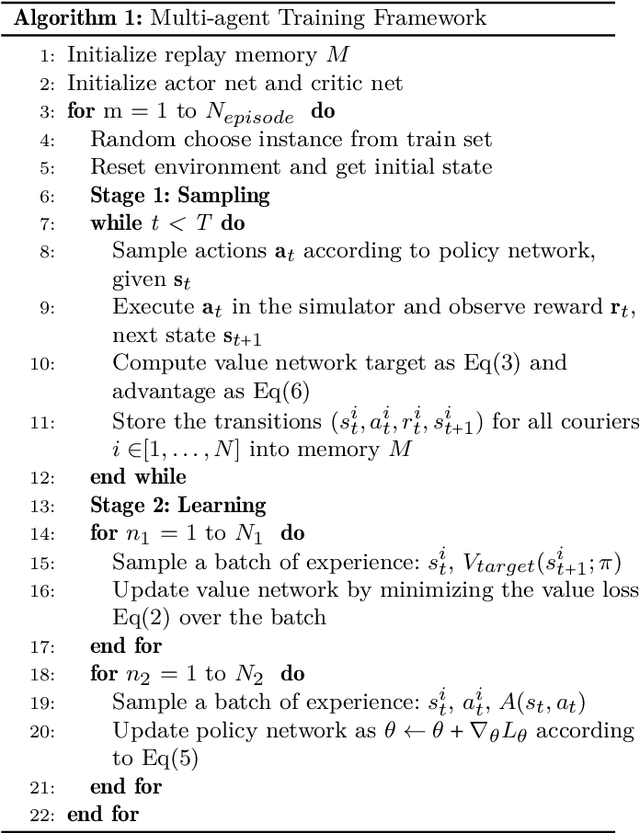
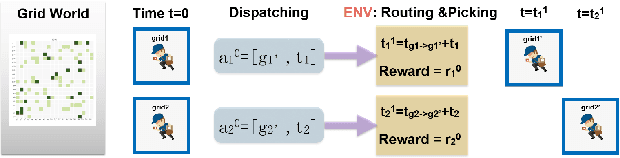
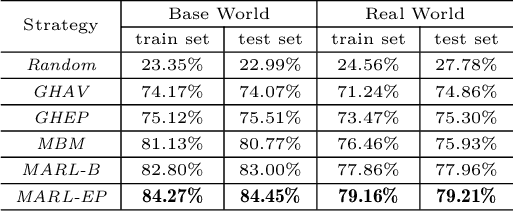
In this paper, we study a courier dispatching problem (CDP) raised from an online pickup-service platform of Alibaba. The CDP aims to assign a set of couriers to serve pickup requests with stochastic spatial and temporal arrival rate among urban regions. The objective is to maximize the revenue of served requests given a limited number of couriers over a period of time. Many online algorithms such as dynamic matching and vehicle routing strategy from existing literature could be applied to tackle this problem. However, these methods rely on appropriately predefined optimization objectives at each decision point, which is hard in dynamic situations. This paper formulates the CDP as a Markov decision process (MDP) and proposes a data-driven approach to derive the optimal dispatching rule-set under different scenarios. Our method stacks multi-layer images of the spatial-and-temporal map and apply multi-agent reinforcement learning (MARL) techniques to evolve dispatching models. This method solves the learning inefficiency caused by traditional centralized MDP modeling. Through comprehensive experiments on both artificial dataset and real-world dataset, we show: 1) By utilizing historical data and considering long-term revenue gains, MARL achieves better performance than myopic online algorithms; 2) MARL is able to construct the mapping between complex scenarios to sophisticated decisions such as the dispatching rule. 3) MARL has the scalability to adopt in large-scale real-world scenarios.